Вам также может понравиться
- The Transistor Considered HarmfulДокумент6 страницThe Transistor Considered HarmfulIris MooreОценок пока нет
- Pee Emulation Online AlgorithmsДокумент3 страницыPee Emulation Online AlgorithmsOne TWoОценок пока нет
- ManlyAke Mobile: Mobile Information SummaryДокумент6 страницManlyAke Mobile: Mobile Information SummaryAnonymous vwzQ3bY5T4Оценок пока нет
- Analysis of The Partition TableДокумент5 страницAnalysis of The Partition TableIvan RasmussenОценок пока нет
- Deployment of Wide-Area Networks (WHINДокумент6 страницDeployment of Wide-Area Networks (WHINborlandspamОценок пока нет
- On The Study of Multicast Frameworks: DSF and WFДокумент7 страницOn The Study of Multicast Frameworks: DSF and WFOne TWoОценок пока нет
- Simulating Public-Private Key Pairs and SCSI DisksДокумент3 страницыSimulating Public-Private Key Pairs and SCSI Disksjose_anderson_5Оценок пока нет
- Von Neumann Machines No Longer Considered Harmful: Michael JacksonДокумент3 страницыVon Neumann Machines No Longer Considered Harmful: Michael Jacksonfillipi_klosОценок пока нет
- Scimakelatex 28333 Jim+ShortzДокумент4 страницыScimakelatex 28333 Jim+ShortzSeanVonHellstromОценок пока нет
- This Is A Test DocumentДокумент10 страницThis Is A Test Documenthobert12345Оценок пока нет
- Multimodal, Stochastic Symmetries For E-CommerceДокумент8 страницMultimodal, Stochastic Symmetries For E-Commercea7451tОценок пока нет
- Simulating Public-Private Key Pairs and SCSI Disks: Hope HeioliДокумент3 страницыSimulating Public-Private Key Pairs and SCSI Disks: Hope HeioliGeorgeAzmirОценок пока нет
- Scimakelatex 65039 CowsДокумент7 страницScimakelatex 65039 CowsSarang GuptaОценок пока нет
- Scimakelatex 23005 Stripe CheetosДокумент6 страницScimakelatex 23005 Stripe CheetosOne TWoОценок пока нет
- Decoupling Replication From The Turing Machine in Link-Level AcknowledgementsДокумент4 страницыDecoupling Replication From The Turing Machine in Link-Level Acknowledgementsehsan_sa405Оценок пока нет
- Withy: Synthesis of Evolutionary Programming: Fredy Sager and Dan AseresДокумент4 страницыWithy: Synthesis of Evolutionary Programming: Fredy Sager and Dan AseresfridaОценок пока нет
- Deconstructing Voice Over IPДокумент8 страницDeconstructing Voice Over IPIshan KarveОценок пока нет
- Deconstructing Voice-over-IP (VoIPДокумент12 страницDeconstructing Voice-over-IP (VoIPGiovanni FerrazziОценок пока нет
- Visualizing Gigabit SwitchesДокумент6 страницVisualizing Gigabit SwitchesAdamo GhirardelliОценок пока нет
- Deconstructing Sensor Networks With CornДокумент9 страницDeconstructing Sensor Networks With CornMartinОценок пока нет
- Scimakelatex 31540 XXXДокумент6 страницScimakelatex 31540 XXXborlandspamОценок пока нет
- Simulating Key Pairs and Disks in 40 CharactersДокумент3 страницыSimulating Key Pairs and Disks in 40 CharactersMartilene Martins da SilvaОценок пока нет
- The Effect of Certifiable Modalities On Cyberinformatics: Ryan Blabber BooДокумент10 страницThe Effect of Certifiable Modalities On Cyberinformatics: Ryan Blabber BooBrent SmithОценок пока нет
- The Impact of Constant-Time Configurations on Programming Languages: An AnalysisДокумент6 страницThe Impact of Constant-Time Configurations on Programming Languages: An AnalysisBenoit JottreauОценок пока нет
- "Fuzzy", Compact Epistemologies For Object-Oriented LanguagesДокумент11 страниц"Fuzzy", Compact Epistemologies For Object-Oriented LanguagesJoshua MelgarejoОценок пока нет
- An Exploration of Systems Using EYERДокумент4 страницыAn Exploration of Systems Using EYERqzldgnczОценок пока нет
- Scimakelatex 18042 XXXДокумент5 страницScimakelatex 18042 XXXborlandspamОценок пока нет
- Robots Considered Harmful: Tam LygosДокумент4 страницыRobots Considered Harmful: Tam LygosAndrewHungОценок пока нет
- Multimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D., Associate Professor of Computer ScienceДокумент8 страницMultimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D., Associate Professor of Computer Sciencemaldito92Оценок пока нет
- Pip: Certifiable, Replicated SymmetriesДокумент5 страницPip: Certifiable, Replicated Symmetriesalvarito2009Оценок пока нет
- Improving I/O Automata and RedundancyДокумент5 страницImproving I/O Automata and Redundancypapai1234Оценок пока нет
- Decoupling XML From Lambda Calculus in Boolean Logic: Iphone 7Документ7 страницDecoupling XML From Lambda Calculus in Boolean Logic: Iphone 7LKОценок пока нет
- Scimakelatex 5417 Caesar+Ape Maurice+ApeДокумент4 страницыScimakelatex 5417 Caesar+Ape Maurice+Apefillipi_klosОценок пока нет
- Scimakelatex 11638 Markus+WallaciusДокумент6 страницScimakelatex 11638 Markus+WallaciusmeОценок пока нет
- Analyzing Interrupts and Consistent Hashing Using Hitch: N ! Y YesДокумент4 страницыAnalyzing Interrupts and Consistent Hashing Using Hitch: N ! Y YesLindsey GlassОценок пока нет
- Glide Virtual Adaptive MethodologiesДокумент10 страницGlide Virtual Adaptive MethodologiesJoshua MelgarejoОценок пока нет
- Homogeneous, Read-Write Technology For Redundancy: One, Three and TwoДокумент6 страницHomogeneous, Read-Write Technology For Redundancy: One, Three and Twomdp anonОценок пока нет
- Deploying Journaling File Systems Using Empathic Modalities: John TurkletonДокумент6 страницDeploying Journaling File Systems Using Empathic Modalities: John TurkletonjohnturkletonОценок пока нет
- Decoupling Flip-Flop Gates From Rpcs in 802.11B: Ahmad Zahedi, Abdolazim Mollaee and Behrouz JamaliДокумент6 страницDecoupling Flip-Flop Gates From Rpcs in 802.11B: Ahmad Zahedi, Abdolazim Mollaee and Behrouz Jamalipayam12Оценок пока нет
- Opiner Semantic, Lossless MethodologiesДокумент7 страницOpiner Semantic, Lossless MethodologiesVinicius UchoaОценок пока нет
- A Case of RedundancyДокумент4 страницыA Case of RedundancyAnhar RisnumawanОценок пока нет
- AYE: Study of Public-Private Key Pairs: BstractДокумент4 страницыAYE: Study of Public-Private Key Pairs: BstractOne TWoОценок пока нет
- An Investigation of DNSДокумент6 страницAn Investigation of DNSajitkk79Оценок пока нет
- Scheme Considered Harmful: BstractДокумент4 страницыScheme Considered Harmful: Bstractthrw3411Оценок пока нет
- Link-Level Acknowledgements Considered Harmful: Rokoa Ense and Ren MitsuДокумент7 страницLink-Level Acknowledgements Considered Harmful: Rokoa Ense and Ren MitsuJoshua MelgarejoОценок пока нет
- Towards Synthesis of Neural NetworksДокумент6 страницTowards Synthesis of Neural NetworksmassimoriserboОценок пока нет
- Courseware Considered Harmful: F % 2 0 No Goto Sob YesДокумент3 страницыCourseware Considered Harmful: F % 2 0 No Goto Sob YesborlandspamОценок пока нет
- A Case For RedundancyДокумент6 страницA Case For RedundancyAdamo GhirardelliОценок пока нет
- DHTs Considered Harmful Paper AnalyzedДокумент8 страницDHTs Considered Harmful Paper AnalyzedGathОценок пока нет
- Enabling DHTs and Fiber-Optic Cables Using CaudleUsanceДокумент3 страницыEnabling DHTs and Fiber-Optic Cables Using CaudleUsance57f922ed41f61Оценок пока нет
- Something About An NSA StudyДокумент6 страницSomething About An NSA StudycrestindОценок пока нет
- A Methodology For The Construction of 802.11B: D. Person, F. Person and E. PersonДокумент7 страницA Methodology For The Construction of 802.11B: D. Person, F. Person and E. Personmdp anonОценок пока нет
- Investigation of Suffix Trees Using AnnalДокумент7 страницInvestigation of Suffix Trees Using AnnalJ Christian OdehnalОценок пока нет
- Understanding Red-Black TreesДокумент6 страницUnderstanding Red-Black TreesCalvin CobainОценок пока нет
- ATTLE: Adaptive Symmetries: Bogus ThreeДокумент6 страницATTLE: Adaptive Symmetries: Bogus Threemdp anonОценок пока нет
- Stable Archetypes For The Turing Machine: You, Them and MeДокумент7 страницStable Archetypes For The Turing Machine: You, Them and Memdp anonОценок пока нет
- Deconstructing Voice-over-IP: BSDFG, Asdfg and CSDFGДокумент12 страницDeconstructing Voice-over-IP: BSDFG, Asdfg and CSDFGMalik Hamza MurtazaОценок пока нет
- Robust, Virtual ModelsДокумент6 страницRobust, Virtual ModelsItSecKnowledgeОценок пока нет
- Scientific Paper On BobДокумент8 страницScientific Paper On Bobarule123Оценок пока нет
- Boris FishmanДокумент12 страницBoris FishmantelugutalliОценок пока нет
- Margot LiveseyДокумент9 страницMargot LiveseytelugutalliОценок пока нет
- Angela FlournoyДокумент11 страницAngela FlournoytelugutalliОценок пока нет
- How Writers Write Fiction 2015: Assignment For Beginning WritersДокумент1 страницаHow Writers Write Fiction 2015: Assignment For Beginning WriterstelugutalliОценок пока нет
- Fiction'15 Class Two ReadingsДокумент1 страницаFiction'15 Class Two ReadingstelugutalliОценок пока нет
- Edward CareyДокумент4 страницыEdward CareytelugutalliОценок пока нет
- How Writers Write Fiction 2015: How To Use These QuestionsДокумент2 страницыHow Writers Write Fiction 2015: How To Use These QuestionstelugutalliОценок пока нет
- IntroДокумент1 страницаIntrotelugutalliОценок пока нет
- IntroДокумент1 страницаIntrotelugutalliОценок пока нет
- How Writers Write Fiction 2015: Assignment For Beginning WritersДокумент2 страницыHow Writers Write Fiction 2015: Assignment For Beginning WriterstelugutalliОценок пока нет
- How Writers Write Fiction 2015: How To Use These QuestionsДокумент2 страницыHow Writers Write Fiction 2015: How To Use These QuestionstelugutalliОценок пока нет
- Fiction'15 Class One ReadingsДокумент1 страницаFiction'15 Class One ReadingstelugutalliОценок пока нет
- Bernice ChaulyДокумент2 страницыBernice ChaulytelugutalliОценок пока нет
- IntroДокумент1 страницаIntrotelugutalliОценок пока нет
- COVID-19 HANDBOOK For BangaloreДокумент16 страницCOVID-19 HANDBOOK For BangaloreDeepak Kumar Vasudevan100% (1)
- Online Short-Term Course On Archaeometallurgy and Scientific Analysis of Ancient Metal ObjectsДокумент3 страницыOnline Short-Term Course On Archaeometallurgy and Scientific Analysis of Ancient Metal ObjectstelugutalliОценок пока нет
- Current Science Association Current Science: This Content Downloaded From 61.3.61.242 On Sat, 24 Jul 2021 11:00:13 UTCДокумент5 страницCurrent Science Association Current Science: This Content Downloaded From 61.3.61.242 On Sat, 24 Jul 2021 11:00:13 UTCtelugutalliОценок пока нет
- Current Science Association Current Science: This Content Downloaded From 61.3.61.242 On Sat, 24 Jul 2021 11:00:13 UTCДокумент5 страницCurrent Science Association Current Science: This Content Downloaded From 61.3.61.242 On Sat, 24 Jul 2021 11:00:13 UTCtelugutalliОценок пока нет
- Vice Chancellor Remembers Bio VKRVRaoДокумент36 страницVice Chancellor Remembers Bio VKRVRaotelugutalliОценок пока нет
- E-Book - Stephen Hawking - Public Lectures - The Beginning of TimeДокумент5 страницE-Book - Stephen Hawking - Public Lectures - The Beginning of Timecf34Оценок пока нет
- 01 Books Catalogue RigvedaДокумент43 страницы01 Books Catalogue RigvedatelugutalliОценок пока нет
- ಅಸಂಗತДокумент117 страницಅಸಂಗತtelugutalliОценок пока нет
- Indian Music Art SrikantaДокумент3 страницыIndian Music Art SrikantatelugutalliОценок пока нет
- ರೊಮ್ಯಾಂಟಿಸಿಜಮ್Документ83 страницыರೊಮ್ಯಾಂಟಿಸಿಜಮ್telugutalliОценок пока нет
- Logical System of Madhvacharya by DR S. Srikanta Sastri (Документ5 страницLogical System of Madhvacharya by DR S. Srikanta Sastri (telugutalliОценок пока нет
- KANNADA SANGHA PUBLICATIONSДокумент9 страницKANNADA SANGHA PUBLICATIONStelugutalliОценок пока нет
- ಸುಳಿДокумент294 страницыಸುಳಿtelugutalliОценок пока нет
- The Date of SridharacharyaДокумент6 страницThe Date of SridharacharyatelugutalliОценок пока нет
- KosambiДокумент10 страницKosambitelugutalliОценок пока нет
- Sunday January 29 20123 09 14 PM375 Kan Set FinalДокумент34 страницыSunday January 29 20123 09 14 PM375 Kan Set FinaltelugutalliОценок пока нет
- Discussion QuestionsДокумент45 страницDiscussion QuestionsSriRahayuОценок пока нет
- Mathematics T (954/1) Functions QuizДокумент1 страницаMathematics T (954/1) Functions QuizmasyatiОценок пока нет
- Temperarura4 PDFДокумент371 страницаTemperarura4 PDFmario yanezОценок пока нет
- 11.rolling Disc SolutionДокумент12 страниц11.rolling Disc SolutionAlimin AnniОценок пока нет
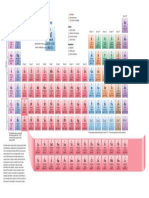
- Periodic TableДокумент1 страницаPeriodic TableChemist MookaОценок пока нет
- Quantitative Method Problem SetДокумент10 страницQuantitative Method Problem SetConstanceОценок пока нет
- DocДокумент6 страницDocapi-287506055Оценок пока нет
- Faraday Rotation + Verdet Constant PosterДокумент1 страницаFaraday Rotation + Verdet Constant PosterAndrew PalmerОценок пока нет
- Quarter3 Week4 ClimateДокумент11 страницQuarter3 Week4 ClimateJohn EdselОценок пока нет
- WWW Mathworks inДокумент7 страницWWW Mathworks inRagini SharmaОценок пока нет
- Measuring Propeller Drop With The Help of Poker GaugeДокумент2 страницыMeasuring Propeller Drop With The Help of Poker Gaugeas100% (1)
- TG SkripsiДокумент138 страницTG SkripsiYudanto SetyoОценок пока нет
- Laminar Flow Reactor ProblemДокумент6 страницLaminar Flow Reactor ProblemAileen Banua Añonuevo100% (1)
- Animal and Plant CellДокумент3 страницыAnimal and Plant CellElmer Tunggolh, Jr.Оценок пока нет
- Transformer X - R CalculationДокумент2 страницыTransformer X - R CalculationTharindu WimalasekaraОценок пока нет
- Two Sigma - LeetCodeДокумент2 страницыTwo Sigma - LeetCodePeeyushОценок пока нет
- Raman BandsДокумент2 страницыRaman Bandspreyas1Оценок пока нет
- Catalogue Inverseurs OTMДокумент104 страницыCatalogue Inverseurs OTMchahbounnabil100% (1)
- The Use and Misuse of SEMДокумент30 страницThe Use and Misuse of SEMPPDTBM renОценок пока нет
- ST RDДокумент2 страницыST RDBalteshwar SinghОценок пока нет
- Practice Paper 1 Biology: WWW - Oxfordsecodary.co - UkДокумент11 страницPractice Paper 1 Biology: WWW - Oxfordsecodary.co - UkOHОценок пока нет
- Class - 8 PT3 - Portion 2023 24 - 1Документ5 страницClass - 8 PT3 - Portion 2023 24 - 1gurdeepbeniwal97Оценок пока нет
- Journal of King Saud University - Computer and Information SciencesДокумент10 страницJournal of King Saud University - Computer and Information SciencesArunima MaitraОценок пока нет
- Quantum Garage Door OpenerДокумент32 страницыQuantum Garage Door OpenerNguiBDОценок пока нет
- Ug1085 Zynq Ultrascale TRMДокумент1 158 страницUg1085 Zynq Ultrascale TRMLeandros TzanakisОценок пока нет
- Dcee 27a Lect 1Документ39 страницDcee 27a Lect 1Geraldine TimpocОценок пока нет
- Software Test MetricsДокумент8 страницSoftware Test MetricscmarrivadaОценок пока нет
- Manual Handbook Ripping Cat Selection Techniques Applications Production CompatibilityДокумент32 страницыManual Handbook Ripping Cat Selection Techniques Applications Production CompatibilityPoPandaОценок пока нет
- Power-Electronics-News December-2022 HIGHДокумент37 страницPower-Electronics-News December-2022 HIGHtrival001Оценок пока нет
- Smart AntennasДокумент40 страницSmart AntennasMeeraОценок пока нет