Вам также может понравиться
- Dangerous Google - Searching For Secrets PDFДокумент12 страницDangerous Google - Searching For Secrets PDFtamasradu89% (19)
- Robot Arm TutorialДокумент16 страницRobot Arm TutorialFarshad yazdi100% (4)
- Signal and SystemДокумент15 страницSignal and Systemswap_k007100% (1)
- Harmonic Filter Calculation SpreadsheetДокумент2 страницыHarmonic Filter Calculation SpreadsheetFarshad yazdi100% (2)
- Harmonic Filter CalculationsДокумент1 страницаHarmonic Filter CalculationsFarshad yazdi100% (3)
- Convert Optical Mouse Into Arduino Web CameraДокумент8 страницConvert Optical Mouse Into Arduino Web CameraJorge Pablo Ordemar Cisneros100% (2)
- MicromouseДокумент17 страницMicromousepiyushji125Оценок пока нет
- Arduino BreadBoard Advance Kit User Guide v2.1 r2Документ23 страницыArduino BreadBoard Advance Kit User Guide v2.1 r2Theodore Meimarakis100% (1)
- System-Level ESD - EMI Protection GuideДокумент25 страницSystem-Level ESD - EMI Protection GuideArvind SinghОценок пока нет
- Interfacing The Arduino With Matlab UsingДокумент2 страницыInterfacing The Arduino With Matlab UsingSingam SridharОценок пока нет
- Maze Solver 2Документ2 страницыMaze Solver 2vsalaiselvam3553Оценок пока нет
- Lessons in Electronic Circuits VIДокумент374 страницыLessons in Electronic Circuits VITugas100% (11)
- How To Measure High Frequency and Duty Cycle SimulДокумент9 страницHow To Measure High Frequency and Duty Cycle SimulHafiz khanОценок пока нет
- Using Matlab Functions in CДокумент10 страницUsing Matlab Functions in CDewi AmoreОценок пока нет
- WinAVR User ManualДокумент24 страницыWinAVR User Manual1donald1Оценок пока нет
- Distance Measuring Instrument-1Документ25 страницDistance Measuring Instrument-1Nisha PatelОценок пока нет
- Arduino: DC Motors Diagrams & CodeДокумент13 страницArduino: DC Motors Diagrams & CodeTugas UtomoОценок пока нет
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Документ69 страницProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_Оценок пока нет
- Matlab Basics Tutorial: VectorsДокумент52 страницыMatlab Basics Tutorial: VectorsMohit Bathla MontyОценок пока нет
- Tutorial 16 - 128x64 ST7920 Graphical - Dot-Matrix SPI LCDДокумент8 страницTutorial 16 - 128x64 ST7920 Graphical - Dot-Matrix SPI LCDCarlos Rojas TezenОценок пока нет
- stm32h742 stm32h743 Device Limitations StmicroelectronicsДокумент45 страницstm32h742 stm32h743 Device Limitations StmicroelectronicsAndres GonzalezОценок пока нет
- New 8051 MeterialДокумент113 страницNew 8051 Meterialpraneeth saiОценок пока нет
- 16feb18 Micromouse WebinarДокумент58 страниц16feb18 Micromouse WebinarUmairОценок пока нет
- 28 Project Learning Kit User GuideДокумент88 страниц28 Project Learning Kit User GuidemayankdgaurОценок пока нет
- ARM Lab Manual1 PDFДокумент53 страницыARM Lab Manual1 PDFAravind RameshОценок пока нет
- Hand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarДокумент7 страницHand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarIJRASETPublicationsОценок пока нет
- MCBSTM32C Lab PDFДокумент30 страницMCBSTM32C Lab PDFguezaki6636Оценок пока нет
- Arduino CCДокумент14 страницArduino CCRachana SrinivasОценок пока нет
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Документ83 страницыSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaОценок пока нет
- Home Automation Using STM32 and Bluetooth ModuleДокумент21 страницаHome Automation Using STM32 and Bluetooth ModuleKhalid0% (1)
- Arm Manual Ver3.2 (Modyfideraj)Документ83 страницыArm Manual Ver3.2 (Modyfideraj)Srikanth SriОценок пока нет
- 1 4 Digit Arduino CounterДокумент26 страниц1 4 Digit Arduino CounterMarius DanilaОценок пока нет
- Hand Gesture Controlled RobotДокумент65 страницHand Gesture Controlled RobotFaheem RaoОценок пока нет
- 2 - Arduino Board - Arduino IDE - LED Control - PWMДокумент33 страницы2 - Arduino Board - Arduino IDE - LED Control - PWMReda FakihОценок пока нет
- Advanced C Programming: Gmake, GDBДокумент25 страницAdvanced C Programming: Gmake, GDBJason SinnamonОценок пока нет
- ARDUINO Presentation by Ravishankar PatiДокумент29 страницARDUINO Presentation by Ravishankar PatiJoshua Das0% (2)
- Esp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enДокумент28 страницEsp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enFranco Rivadeneyra100% (1)
- Electronics by Sir JoelДокумент47 страницElectronics by Sir JoelDann SarteОценок пока нет
- Maze Solving AlgorithmsДокумент7 страницMaze Solving AlgorithmssurojitguhaОценок пока нет
- Short Range Radar SystemДокумент14 страницShort Range Radar SystemKaththi Karthick100% (1)
- The 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingДокумент297 страницThe 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingShalini BaruahОценок пока нет
- ARM Lab ManualДокумент99 страницARM Lab ManualNguyễn QuânОценок пока нет
- Line Follower Robot Final PPT 1Документ16 страницLine Follower Robot Final PPT 1harshil mangeОценок пока нет
- Micromouse PresentationДокумент49 страницMicromouse PresentationnitinakkОценок пока нет
- Fundamentals of Data Structures in C (HorowitzДокумент644 страницыFundamentals of Data Structures in C (HorowitzQQQОценок пока нет
- Distance Measurement System Project Report - Amit BarДокумент32 страницыDistance Measurement System Project Report - Amit BarAmit BarОценок пока нет
- Robotics Explorer (150 Classes) - Skyfi LabsДокумент6 страницRobotics Explorer (150 Classes) - Skyfi LabsDivya KОценок пока нет
- DsPIC30F4011 - Robotics 3Документ33 страницыDsPIC30F4011 - Robotics 3Senthil Kumar100% (1)
- Thumb InstructionsДокумент37 страницThumb InstructionsBaskar ArumugamОценок пока нет
- Shortest Path Algorithm For GPS Guided RobotДокумент23 страницыShortest Path Algorithm For GPS Guided RobotVishakh ShewalkarОценок пока нет
- Data-Level Parallelism in Vector, SIMD, And: GPU ArchitecturesДокумент29 страницData-Level Parallelism in Vector, SIMD, And: GPU ArchitecturesMarcelo AraujoОценок пока нет
- EC8711-Embedded Lab ManualДокумент108 страницEC8711-Embedded Lab ManualparantnОценок пока нет
- Jump, Loop and Call Instructions: University of Engineering and Technology TaxilaДокумент93 страницыJump, Loop and Call Instructions: University of Engineering and Technology TaxilaPraneetha InumarthiОценок пока нет
- mcb1700 LAB - Intro - ARM Cortex m3Документ22 страницыmcb1700 LAB - Intro - ARM Cortex m3RagulANОценок пока нет
- DLD Lab 01 - Getting Started With Tinkercad-EditedДокумент23 страницыDLD Lab 01 - Getting Started With Tinkercad-Editedsyed mottaquiОценок пока нет
- Arduino LCD ThermostatДокумент6 страницArduino LCD Thermostatmzovkic8Оценок пока нет
- Messenger Development Without Internet Using Zigbee TechnologyДокумент89 страницMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyОценок пока нет
- Embedded Sys. & Robotics WorkshopДокумент5 страницEmbedded Sys. & Robotics WorkshopPriyanka SharmaОценок пока нет
- PROJECT BIDIRECTIONAL VISITOR COUNTER ConfirmДокумент14 страницPROJECT BIDIRECTIONAL VISITOR COUNTER Confirmsaikat Sarkar100% (1)
- ARM Lab MannualДокумент136 страницARM Lab MannualRanjith M KumarОценок пока нет
- EE 212 L Microprocessor and Microcontroller: Lab ManualДокумент77 страницEE 212 L Microprocessor and Microcontroller: Lab Manualrizwan900Оценок пока нет
- Arm ProcessorДокумент9 страницArm ProcessorRahul AgarwalОценок пока нет
- LPC 2378 Development BoardДокумент160 страницLPC 2378 Development BoardDinesh KumarОценок пока нет
- Mpu6050 SlidesДокумент12 страницMpu6050 SlidesNor Rochmad Hadi PОценок пока нет
- Real Time Object MeasurementДокумент3 страницыReal Time Object MeasurementThong NguyenОценок пока нет
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsДокумент32 страницыWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaОценок пока нет
- STM32 Training 12W06 1V0Документ73 страницыSTM32 Training 12W06 1V0Oussama Riahi ChОценок пока нет
- MQ306AДокумент2 страницыMQ306AFarshad yazdiОценок пока нет
- MQ 214Документ2 страницыMQ 214api-3850017100% (1)
- MQ307AДокумент2 страницыMQ307AFarshad yazdiОценок пока нет
- For CARBON MONOXIDE (CO) and Methane Detection General InformationДокумент3 страницыFor CARBON MONOXIDE (CO) and Methane Detection General InformationFarshad yazdi100% (1)
- MQ 216Документ2 страницыMQ 216Farshad yazdiОценок пока нет
- Technical Data Mq-7 Gas Sensor: FeaturesДокумент3 страницыTechnical Data Mq-7 Gas Sensor: FeaturesFarshad yazdiОценок пока нет
- MQ 8Документ2 страницыMQ 8Farshad yazdiОценок пока нет
- Variable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFДокумент3 страницыVariable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFmuta'alimОценок пока нет
- Datasheet Sensor MQ9Документ3 страницыDatasheet Sensor MQ9Harold CaraballoОценок пока нет
- MQ 6Документ2 страницыMQ 6api-3850017Оценок пока нет
- MQ 5Документ2 страницыMQ 5api-3850017100% (2)
- MQ 3Документ2 страницыMQ 3Farshad yazdiОценок пока нет
- MQ 4Документ2 страницыMQ 4api-3850017100% (1)
- Micro-Notes 401 Diodo Schottky PDFДокумент2 страницыMicro-Notes 401 Diodo Schottky PDFElectricEngineeringОценок пока нет
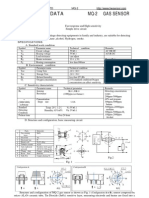
- MQ 2Документ2 страницыMQ 2api-3850017100% (1)
- Driver RelayДокумент2 страницыDriver Relaysandi sukma100% (1)
- Electus Distribution Reference Data Sheet: RESCODE PDFДокумент2 страницыElectus Distribution Reference Data Sheet: RESCODE PDFFarshad yazdi100% (2)
- Semiconductor Application NoteДокумент10 страницSemiconductor Application NoteFarshad yazdi100% (2)
- Impedance Matching 2Документ3 страницыImpedance Matching 2Madhavesh KulkarniОценок пока нет
- Electus Distribution Reference Data Sheet: POLYMOVS PDFДокумент2 страницыElectus Distribution Reference Data Sheet: POLYMOVS PDFFarshad yazdi100% (2)
- Electus Distribution Reference Data Sheet: FUSEPRMR PDFДокумент2 страницыElectus Distribution Reference Data Sheet: FUSEPRMR PDFFarshad yazdiОценок пока нет
- CcoptДокумент3 страницыCcoptMidhun VargheseОценок пока нет
- Led LaserДокумент3 страницыLed LaserPayal SinghalОценок пока нет
- Basic For PIC Microcontrollers PDFДокумент172 страницыBasic For PIC Microcontrollers PDFMohammed Ahmad OsamaОценок пока нет
- CS 108 Week 11 Computer NetworksДокумент24 страницыCS 108 Week 11 Computer NetworksFarshad yazdiОценок пока нет
- Um 3750Документ5 страницUm 3750Sofiane MelkiОценок пока нет
- Temperature Control With SCRДокумент3 страницыTemperature Control With SCRRoberto Fernandez100% (3)
- Unit 1 MCQДокумент8 страницUnit 1 MCQMegha KumbharОценок пока нет
- JBL - JBL Car Amplifier A6000gti PDFДокумент12 страницJBL - JBL Car Amplifier A6000gti PDFfreddie112Оценок пока нет
- EATON2 Electrical Distribution in Residential and Commercial Price ListДокумент28 страницEATON2 Electrical Distribution in Residential and Commercial Price ListLokendra SinghОценок пока нет
- Quick Start Guide: 1. Unpack The Switch and Check Contents 2. Mount The SwitchДокумент9 страницQuick Start Guide: 1. Unpack The Switch and Check Contents 2. Mount The SwitchDavid „Saijitsu“ N.Оценок пока нет
- sITE aVAIL 29-07-2021Документ58 страницsITE aVAIL 29-07-2021ogbodoemaОценок пока нет
- Detailed Lesson PlanДокумент3 страницыDetailed Lesson PlanmatnogalfredОценок пока нет
- Eowave Weather Drones Building Instructions 3Документ6 страницEowave Weather Drones Building Instructions 3wfarnabydosОценок пока нет
- Ditto Manual File Rev 2Документ2 страницыDitto Manual File Rev 2rkidruОценок пока нет
- KAS101T Phy AKTU 5yearДокумент8 страницKAS101T Phy AKTU 5yearDevansh BansalОценок пока нет
- 1 Exam Chapter 1 CSA Level 2 InspectorДокумент29 страниц1 Exam Chapter 1 CSA Level 2 InspectorEyyEychОценок пока нет
- Io&M Manual: Material No. Item No. Dale Part No. DescriptionДокумент66 страницIo&M Manual: Material No. Item No. Dale Part No. DescriptionSudhir JoshiОценок пока нет
- Maxsys ProductSheet WДокумент2 страницыMaxsys ProductSheet WRael Hdez GunsОценок пока нет
- A 13486Документ3 страницыA 13486Mohamed ShameemОценок пока нет
- CRT2846 Deh-P8400mpДокумент89 страницCRT2846 Deh-P8400mpVoja ElektronikОценок пока нет
- SCR Switching Characteristics OR Dynamic CharacteristicsДокумент22 страницыSCR Switching Characteristics OR Dynamic CharacteristicsVeeravasantharao BattulaОценок пока нет
- MT87Документ2 страницыMT87Jenalyn Orbasido EvangelistaОценок пока нет
- Gysmi 190Документ7 страницGysmi 190Gabriel DrideanuОценок пока нет
- Voltage Detector Ic With Counter Timer: Bd45Xxxg Bd46XxxgДокумент5 страницVoltage Detector Ic With Counter Timer: Bd45Xxxg Bd46XxxgPham LongОценок пока нет
- CB Lcs-150E.1 Level Control System: Features and BenefitsДокумент3 страницыCB Lcs-150E.1 Level Control System: Features and Benefitsfauzi endraОценок пока нет
- IEEE Xplore Full-Text PDFДокумент10 страницIEEE Xplore Full-Text PDFpshyciОценок пока нет
- 555 Audio Alarm ChartДокумент4 страницы555 Audio Alarm Chartnasty_beerОценок пока нет
- Fundamentals of Thermoelectrics (TE)Документ8 страницFundamentals of Thermoelectrics (TE)Prakash GОценок пока нет
- Project Assignment: Power System Simulation For Engineers (PSS/E Version 34)Документ12 страницProject Assignment: Power System Simulation For Engineers (PSS/E Version 34)Suterm SeccionОценок пока нет
- Sheet EMCP II+Документ4 страницыSheet EMCP II+ANDRE LUIZ RAMOS DE FREITAS100% (1)
- Fuel Cell Presentation FinalДокумент20 страницFuel Cell Presentation FinalrikvermaОценок пока нет