Вам также может понравиться
- NA FinalExam Summer15 PDFДокумент8 страницNA FinalExam Summer15 PDFAnonymous jITO0qQHОценок пока нет
- HSC4537 SyllabusДокумент10 страницHSC4537 Syllabusmido1770Оценок пока нет
- Sword of The Spirit at Franciscan UniversityДокумент11 страницSword of The Spirit at Franciscan UniversityJohn Flaherty100% (1)
- Neural Network Lectures RBF 1Документ44 страницыNeural Network Lectures RBF 1Yekanth RamОценок пока нет
- Lec 10 SVMДокумент35 страницLec 10 SVMvijayОценок пока нет
- Unit IVДокумент100 страницUnit IVMugizhan NagendiranОценок пока нет
- Numerical Methods Chapter 1 3 4Документ44 страницыNumerical Methods Chapter 1 3 4dsnОценок пока нет
- Lecture 4Документ33 страницыLecture 4Venkat ram ReddyОценок пока нет
- Divide and ConquerДокумент50 страницDivide and Conquerjoe learioОценок пока нет
- EE5434 RegressionДокумент96 страницEE5434 Regressionrui sunОценок пока нет
- Numerical Methods - An IntroductionДокумент30 страницNumerical Methods - An IntroductionPrisma FebrianaОценок пока нет
- Exercise 4: Self-Organizing Maps: Articial Neural Networks and Other Learning Systems, 2D1432Документ7 страницExercise 4: Self-Organizing Maps: Articial Neural Networks and Other Learning Systems, 2D1432Durai ArunОценок пока нет
- Lecture1 6 PDFДокумент30 страницLecture1 6 PDFColinОценок пока нет
- MLCH9Документ45 страницMLCH9sam33rdhakalОценок пока нет
- Dynamicprogramming 160512234533Документ30 страницDynamicprogramming 160512234533Abishek joshuaОценок пока нет
- Math 243M, Numerical Linear Algebra Lecture NotesДокумент71 страницаMath 243M, Numerical Linear Algebra Lecture NotesRonaldОценок пока нет
- Linear AlgebraДокумент65 страницLinear AlgebraWilliam Hartono100% (1)
- Sparse 1Документ68 страницSparse 1abiОценок пока нет
- 5 Round-Off Errors and Truncation ErrorsДокумент35 страниц5 Round-Off Errors and Truncation ErrorsEdryan PoОценок пока нет
- Linear AlgebraДокумент65 страницLinear AlgebraMariyah ZainОценок пока нет
- Linear RegressionДокумент29 страницLinear RegressionSoubhav ChamanОценок пока нет
- Teknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DДокумент44 страницыTeknik Komputasi (TEI 116) : 3 Sks Oleh: Husni Rois Ali, S.T., M.Eng. Noor Akhmad Setiawan, S.T., M.T., PH.DblackzenyОценок пока нет
- AI-Lecture 12 - Simple PerceptronДокумент24 страницыAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- Unit 2Документ37 страницUnit 2PoornaОценок пока нет
- SUMSEM2022-23 CSI3020 TH VL2022230700600 2023-06-16 Reference-Material-IДокумент49 страницSUMSEM2022-23 CSI3020 TH VL2022230700600 2023-06-16 Reference-Material-IVishnu MukundanОценок пока нет
- PWD 2019 20 Class 9 Final PDFДокумент21 страницаPWD 2019 20 Class 9 Final PDFGuille FKОценок пока нет
- Discretization of EquationДокумент14 страницDiscretization of Equationsandyengineer13Оценок пока нет
- Numc PDFДокумент18 страницNumc PDFMadhur MayankОценок пока нет
- Supervised Learning 1 PDFДокумент162 страницыSupervised Learning 1 PDFAlexanderОценок пока нет
- Divide and ConquerДокумент17 страницDivide and Conquernishtha royОценок пока нет
- Lec 6 TutorialДокумент27 страницLec 6 TutorialsentryОценок пока нет
- Numerical Programming I (For CSE) : Final ExamДокумент8 страницNumerical Programming I (For CSE) : Final ExamhisuinОценок пока нет
- CmdieДокумент8 страницCmdieBeny AbdouОценок пока нет
- L5 Normal Equations For Regression PDFДокумент20 страницL5 Normal Equations For Regression PDFjoseph karimОценок пока нет
- Lecture 2 MathДокумент34 страницыLecture 2 Mathnikola001Оценок пока нет
- Integration of Ordinary Differential Equations: + Q (X) R (X) (16.0.1)Документ4 страницыIntegration of Ordinary Differential Equations: + Q (X) R (X) (16.0.1)Vinay GuptaОценок пока нет
- Week 7Документ53 страницыWeek 7Khaled TarekОценок пока нет
- Clustering (Unit 3)Документ71 страницаClustering (Unit 3)vedang maheshwari100% (1)
- Lecture 1Документ17 страницLecture 1amjadtawfeq2Оценок пока нет
- DSCI 303: Machine Learning For Data Science Fall 2020Документ5 страницDSCI 303: Machine Learning For Data Science Fall 2020Anonymous StudentОценок пока нет
- SortingДокумент57 страницSortingSanjeeb PradhanОценок пока нет
- Unit 4,5Документ13 страницUnit 4,5ggyutuygjОценок пока нет
- CIS 520, Machine Learning, Fall 2015: Assignment 2 Due: Friday, September 18th, 11:59pm (Via Turnin)Документ3 страницыCIS 520, Machine Learning, Fall 2015: Assignment 2 Due: Friday, September 18th, 11:59pm (Via Turnin)DiDo Mohammed AbdullaОценок пока нет
- Recursive Binary Search AlgorithmДокумент25 страницRecursive Binary Search AlgorithmChhaya NarvekarОценок пока нет
- Komputasi TK Kuliah 1 Genap1213Документ33 страницыKomputasi TK Kuliah 1 Genap1213Ferdian TjioeОценок пока нет
- Assignment ProblemДокумент16 страницAssignment ProblemSamia RahmanОценок пока нет
- SVM Using PythonДокумент24 страницыSVM Using PythonRavindra AmbilwadeОценок пока нет
- Chapter 8 Part 2 Distribution ModelДокумент23 страницыChapter 8 Part 2 Distribution ModelernieОценок пока нет
- Unit 8 Assignment Problem: StructureДокумент14 страницUnit 8 Assignment Problem: StructurezohaibОценок пока нет
- w3 - Linear Model - Linear RegressionДокумент33 страницыw3 - Linear Model - Linear RegressionSwastik SindhaniОценок пока нет
- CPSC 540 Assignment 1 (Due January 19)Документ9 страницCPSC 540 Assignment 1 (Due January 19)JohnnyDoe0x27AОценок пока нет
- Python Basics NympyДокумент5 страницPython Basics NympyikramОценок пока нет
- COMP2230 Introduction To Algorithmics: Lecture OverviewДокумент35 страницCOMP2230 Introduction To Algorithmics: Lecture OverviewMrZaggyОценок пока нет
- Random ForestДокумент83 страницыRandom ForestBharath Reddy MannemОценок пока нет
- ML NotesДокумент79 страницML NotesIna VladОценок пока нет
- Olympiad Combinatorics PDFДокумент255 страницOlympiad Combinatorics PDFKrutarth Patel100% (5)
- Assignment 2Документ4 страницыAssignment 210121011Оценок пока нет
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Support Component List: Components For Spacecraft ElectronicsДокумент22 страницыSupport Component List: Components For Spacecraft ElectronicsDeepa DevarajОценок пока нет
- Recipes From Mum's Kitchen - Mutton BiryaniДокумент3 страницыRecipes From Mum's Kitchen - Mutton BiryaniDeepa DevarajОценок пока нет
- Standard Wire Gauge ListДокумент3 страницыStandard Wire Gauge ListDeepa DevarajОценок пока нет
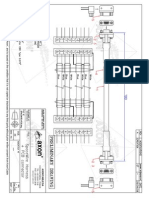
- Spacewire PCBДокумент1 страницаSpacewire PCBDeepa DevarajОценок пока нет
- Spec - Dappro 16Mb SRAM - 5V - QFP68Документ23 страницыSpec - Dappro 16Mb SRAM - 5V - QFP68Deepa DevarajОценок пока нет
- EC Announces Dates For Polls in Five StatesДокумент3 страницыEC Announces Dates For Polls in Five StatesDeepa DevarajОценок пока нет
- Results PO 2013Документ22 страницыResults PO 2013Deepa DevarajОценок пока нет
- 2N6849 LP PMOS IR For Neg SupplyДокумент7 страниц2N6849 LP PMOS IR For Neg SupplyDeepa DevarajОценок пока нет
- Tina Ti Spice ModelsДокумент17 страницTina Ti Spice Modelsdragos_bondОценок пока нет
- Systems Advantages of 1553Документ8 страницSystems Advantages of 1553Deepa DevarajОценок пока нет
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationДокумент3 страницыSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDeepa DevarajОценок пока нет
- 2n7389 Irhf9130Документ8 страниц2n7389 Irhf9130Deepa DevarajОценок пока нет
- Vehicle Rto Exam FaqДокумент1 страницаVehicle Rto Exam FaqDeepa DevarajОценок пока нет
- 2N6849Документ2 страницы2N6849Deepa DevarajОценок пока нет
- 2N5672Документ4 страницы2N5672Deepa DevarajОценок пока нет
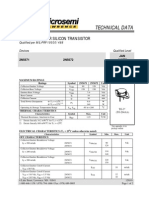
- Technical Data: PNP High Power Silicon TransistorДокумент3 страницыTechnical Data: PNP High Power Silicon TransistorDeepa DevarajОценок пока нет
- NPN 2N5671 - 2N5672: H I G H C U R R e N T F A S T S W I T C H I N G A P P L I C A T I o N SДокумент0 страницNPN 2N5671 - 2N5672: H I G H C U R R e N T F A S T S W I T C H I N G A P P L I C A T I o N SDeepa DevarajОценок пока нет
- 2N3792Документ4 страницы2N3792Deepa DevarajОценок пока нет
- 2N5672Документ13 страниц2N5672Deepa DevarajОценок пока нет
- 2 N 5153Документ3 страницы2 N 5153Deepa DevarajОценок пока нет
- Technical Data: NPN High Power Silicon TransistorДокумент2 страницыTechnical Data: NPN High Power Silicon TransistorDeepa DevarajОценок пока нет
- 2N3792Документ4 страницы2N3792Deepa DevarajОценок пока нет
- 1 N 5822Документ3 страницы1 N 5822Deepa DevarajОценок пока нет
- 2N3700UBДокумент0 страниц2N3700UBDeepa DevarajОценок пока нет
- 2N3637Документ0 страниц2N3637Deepa DevarajОценок пока нет
- 2N3019Документ0 страниц2N3019Deepa DevarajОценок пока нет
- Description Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersДокумент0 страницDescription Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersDeepa DevarajОценок пока нет
- Diodo Shotky 1n5817-5819Документ9 страницDiodo Shotky 1n5817-5819Alejandro Esteban VilaОценок пока нет
- 1 N 5822Документ3 страницы1 N 5822Deepa DevarajОценок пока нет
- Description Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersДокумент0 страницDescription Appearance: Surface Mount Voidless-Hermetically-Sealed Ultra Fast Recovery Glass RectifiersDeepa DevarajОценок пока нет
- Customer IdentifyingДокумент11 страницCustomer Identifyinganon_363811381100% (2)
- Discussion Report - Language, Langue and ParoleДокумент3 страницыDiscussion Report - Language, Langue and ParoleIgnacio Jey BОценок пока нет
- Report On Descriptive Statistics and Item AnalysisДокумент21 страницаReport On Descriptive Statistics and Item Analysisapi-3840189100% (1)
- Reaction Paper On Thesis ProposalДокумент2 страницыReaction Paper On Thesis ProposalDann SarteОценок пока нет
- Explanatory Models and Practice Models of SHRDДокумент5 страницExplanatory Models and Practice Models of SHRDSonia TauhidОценок пока нет
- Critical Reflective Techniques - Ilumin, Paula Joy DДокумент2 страницыCritical Reflective Techniques - Ilumin, Paula Joy DPaula Joy IluminОценок пока нет
- Anatomy and Surgical Approaches To Lateral VentriclesДокумент39 страницAnatomy and Surgical Approaches To Lateral VentriclesKaramsi Gopinath NaikОценок пока нет
- Natural Tactical Systems (NTS) 5 Day 360° CQD Basic Instructor CourseДокумент6 страницNatural Tactical Systems (NTS) 5 Day 360° CQD Basic Instructor Coursejhon fierroОценок пока нет
- Review of Present Tense - 1st HomeworkДокумент5 страницReview of Present Tense - 1st HomeworkPaola SОценок пока нет
- Advanced Pharmaceutical Engineering (Adpharming) : Accreditation Course AimsДокумент2 страницыAdvanced Pharmaceutical Engineering (Adpharming) : Accreditation Course AimsJohn AcidОценок пока нет
- Csov HomeworkДокумент4 страницыCsov Homeworkerb6df0n100% (1)
- Naveen Reddy Billapati: Bachelor of Technology in Mechanical EngineeringДокумент2 страницыNaveen Reddy Billapati: Bachelor of Technology in Mechanical EngineeringvikОценок пока нет
- A Detailed Lesson Plan For Grade 7 Final DemoДокумент9 страницA Detailed Lesson Plan For Grade 7 Final DemoEljean LaclacОценок пока нет
- Project NEXT Accomplishment ReportДокумент5 страницProject NEXT Accomplishment ReportRodolfo NelmidaОценок пока нет
- Exam DLLДокумент2 страницыExam DLLlalhang47Оценок пока нет
- Project SynopsisДокумент7 страницProject SynopsisAbinash MishraОценок пока нет
- Course: Life and Works of Rizal: Sand Course Intended Learning RoutcomeДокумент15 страницCourse: Life and Works of Rizal: Sand Course Intended Learning RoutcomeDaryl HilongoОценок пока нет
- Project RizalДокумент2 страницыProject RizalTyrene Samantha SomisОценок пока нет
- Pricing Tutorial MEXLv2 PDFДокумент8 страницPricing Tutorial MEXLv2 PDFjegosssОценок пока нет
- Capstone IdeasДокумент9 страницCapstone IdeastijunkОценок пока нет
- Review of Effective Human Resource Management Techniques in Agile Software Project ManagementДокумент6 страницReview of Effective Human Resource Management Techniques in Agile Software Project ManagementAmjad IqbalОценок пока нет
- Broadcaster 2012 89-2 WinterДокумент25 страницBroadcaster 2012 89-2 WinterConcordiaNebraskaОценок пока нет
- How Many Hours Should One Study To Crack The Civil Services Exam?Документ27 страницHow Many Hours Should One Study To Crack The Civil Services Exam?654321Оценок пока нет
- 14thconvo Booklet at IIT GДокумент73 страницы14thconvo Booklet at IIT GMallikarjunPerumallaОценок пока нет
- Aby Warburg's, Bilderatlas Mnemosyne': Systems of Knowledge and Iconography, In: Burlington Magazine 162, 2020, Pp. 1078-1083Документ7 страницAby Warburg's, Bilderatlas Mnemosyne': Systems of Knowledge and Iconography, In: Burlington Magazine 162, 2020, Pp. 1078-1083AntonisОценок пока нет
- Sing A Joyful Song - PREVIEWДокумент5 страницSing A Joyful Song - PREVIEWRonilo, Jr. CalunodОценок пока нет
- Bank of India (Officers') Service Regulations, 1979Документ318 страницBank of India (Officers') Service Regulations, 1979AtanuОценок пока нет
- Music Discoveries: Discover More at The ShopДокумент3 страницыMusic Discoveries: Discover More at The ShopyolandaferniОценок пока нет