Вам также может понравиться
- Equipment CapabilitesДокумент19 страницEquipment Capabilitesapi-1975359897% (194)
- Dissolved OxygenДокумент2 страницыDissolved OxygenAnonymous atBeojaОценок пока нет
- Applied Mechanics of Solids: An Introduction to the Mechanics of Elastic and Plastic DeformationДокумент18 страницApplied Mechanics of Solids: An Introduction to the Mechanics of Elastic and Plastic DeformationHunny GuptaОценок пока нет
- Advances in Engineering Plasticity and its ApplicationsОт EverandAdvances in Engineering Plasticity and its ApplicationsW.B. LeeОценок пока нет
- Elevator Installation Contract - 2022 - CNMДокумент5 страницElevator Installation Contract - 2022 - CNMsolid groupОценок пока нет
- Determining Stress Intensity Factors Analytically and NumericallyДокумент50 страницDetermining Stress Intensity Factors Analytically and NumericallyAdnen Laamouri100% (1)
- Corrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsДокумент1 страницаCorrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsAsma Sed100% (1)
- Tutorial 17 - CEL - BoatДокумент13 страницTutorial 17 - CEL - BoatBin VoОценок пока нет
- Forming Curve SignificanceДокумент14 страницForming Curve SignificanceNishant PatilОценок пока нет
- Nonlinear Shell TheoryДокумент27 страницNonlinear Shell TheorychacrdОценок пока нет
- Marc Mentat FEM PDFДокумент19 страницMarc Mentat FEM PDFMahmud Kori EffendiОценок пока нет
- Tutorial 16 - CEL - BottleДокумент14 страницTutorial 16 - CEL - BottleRezaОценок пока нет
- Scallops Are Cut Outs in Weld Corners Which Are Used in Many Structures As in BridgesДокумент3 страницыScallops Are Cut Outs in Weld Corners Which Are Used in Many Structures As in BridgesJanuel BorelaОценок пока нет
- The Crash Energy Absorption of The Vehicles Front StructuresДокумент6 страницThe Crash Energy Absorption of The Vehicles Front StructuresRoll MarollОценок пока нет
- Evaluating The Effect of Pretension On The Fatigue Life of Double Lap Bolted Joint by Analytical & Numerical (FEA)Документ6 страницEvaluating The Effect of Pretension On The Fatigue Life of Double Lap Bolted Joint by Analytical & Numerical (FEA)MichaelKubaОценок пока нет
- Dynamic Analysis by Component Mode PDFДокумент8 страницDynamic Analysis by Component Mode PDFRodrigo GarayОценок пока нет
- Construction Companies in IndiaДокумент11 страницConstruction Companies in Indiashobhit.goel33% (3)
- NX Assign Material PropertiesДокумент54 страницыNX Assign Material PropertiesbiondavОценок пока нет
- Maxxi Report FinalДокумент7 страницMaxxi Report FinalDepanshu Gola100% (1)
- Nonlinear Ordinary Differential Equations in Transport ProcessesОт EverandNonlinear Ordinary Differential Equations in Transport ProcessesОценок пока нет
- Theoretical Calculation and Experimental Analysis of The Rigid Body ModesДокумент9 страницTheoretical Calculation and Experimental Analysis of The Rigid Body ModesAnonymous d23gWCRQОценок пока нет
- DataGridView FAQДокумент69 страницDataGridView FAQyamanoblu100% (1)
- Finite Element Modelling and Analysis of Hot Turning OperationДокумент55 страницFinite Element Modelling and Analysis of Hot Turning OperationSangar LingamОценок пока нет
- Abstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeДокумент55 страницAbstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeZarra FaktОценок пока нет
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989От EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadОценок пока нет
- Kurt Miller Tod Dalrymple: Rubber Material Curve Fitting With Abaqus/CaeДокумент34 страницыKurt Miller Tod Dalrymple: Rubber Material Curve Fitting With Abaqus/CaePallab Jyoti DasОценок пока нет
- NURB Curves A Guide For The UninitiatedДокумент27 страницNURB Curves A Guide For The UninitiatedJosildo Silva100% (3)
- MTech Semester I Exam Questions on Elasticity and PlasticityДокумент2 страницыMTech Semester I Exam Questions on Elasticity and PlasticityNaren GujjarОценок пока нет
- SNUx Chapter 3 PDFДокумент22 страницыSNUx Chapter 3 PDFMuhammad IrfanОценок пока нет
- Slocum, Alex Fundamentals of Design Mit PDFДокумент75 страницSlocum, Alex Fundamentals of Design Mit PDFvarunОценок пока нет
- Determine Coefficient of Friction in Abaqus TutorialДокумент6 страницDetermine Coefficient of Friction in Abaqus TutorialAffiz_Afripin_4289Оценок пока нет
- Discretization ErrorДокумент11 страницDiscretization Errorசுஜித் குமார்Оценок пока нет
- ISO 281 Waelzlager enДокумент16 страницISO 281 Waelzlager enLe Thanh HaiОценок пока нет
- Product Data: Hexply M21Документ8 страницProduct Data: Hexply M21Antonis AlexiadisОценок пока нет
- PDFДокумент149 страницPDFadleronurОценок пока нет
- A 1028-03 Stainless Steel Bars For Compressor and Turbine AirfoilsДокумент4 страницыA 1028-03 Stainless Steel Bars For Compressor and Turbine Airfoilsalucard375100% (1)
- Rolling Contact Fatigue Resistance of Hard Coatings On Bearing SteelsДокумент24 страницыRolling Contact Fatigue Resistance of Hard Coatings On Bearing Steelsmans2014Оценок пока нет
- Three-Layer Sandwich Shell Under Normal Pressure LoadingДокумент6 страницThree-Layer Sandwich Shell Under Normal Pressure LoadingDan WolfОценок пока нет
- Mesh Generation and Grid Generation - SoftwareДокумент10 страницMesh Generation and Grid Generation - SoftwareShyam Sundar GodaraОценок пока нет
- Freudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFДокумент11 страницFreudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFsvk_ntОценок пока нет
- The 35th Symposium on Shock, Vibration and Associated EnvironmentsДокумент332 страницыThe 35th Symposium on Shock, Vibration and Associated Environmentsskr2010Оценок пока нет
- Applications of Potential Theory in Mechanics: Selection of New ResultsДокумент456 страницApplications of Potential Theory in Mechanics: Selection of New ResultsPaulo Henrique CardosoОценок пока нет
- Solid Element Formulation OverviewДокумент36 страницSolid Element Formulation OverviewasdqwexОценок пока нет
- APDL Code For Thermal Analysis of PCBДокумент3 страницыAPDL Code For Thermal Analysis of PCBASIM RIAZОценок пока нет
- Evaluation of The Non-Linear Fracture Parameters J and C With ANSYSДокумент11 страницEvaluation of The Non-Linear Fracture Parameters J and C With ANSYSPeti KovácsОценок пока нет
- Continuum Mechanica Cheat SheetДокумент5 страницContinuum Mechanica Cheat SheetAli100% (1)
- Finite Element Global Buckling Analysis of Tapered Curved LaminatesДокумент12 страницFinite Element Global Buckling Analysis of Tapered Curved LaminatespdhurveyОценок пока нет
- Astm A227Документ5 страницAstm A227Diganta KonerОценок пока нет
- Solving Linear Equations with Skyline MatricesДокумент17 страницSolving Linear Equations with Skyline Matricesjuan carlos molano toroОценок пока нет
- STI11 - Plasticity Hardening RulesДокумент4 страницыSTI11 - Plasticity Hardening RulesCuGáyLâmĐồngОценок пока нет
- Finite Element Method in Engineering 4th Edition 2 DISCRETIZATION of The DOMAINДокумент27 страницFinite Element Method in Engineering 4th Edition 2 DISCRETIZATION of The DOMAINRoy SrivastavaОценок пока нет
- SolidWorks Simulation - Avoiding SingularitiesДокумент6 страницSolidWorks Simulation - Avoiding SingularitiesAnonymous P8Bt46mk5IОценок пока нет
- MSE 280B Assignment 7 SolutionsДокумент6 страницMSE 280B Assignment 7 SolutionsBrishen Hawkins100% (2)
- Fracture Specimen Stree AnalysisДокумент15 страницFracture Specimen Stree AnalysisGaurav PundirОценок пока нет
- 7 Abaqus Conv GuidelinesДокумент4 страницы7 Abaqus Conv GuidelinesSrinivas RallabandiОценок пока нет
- Thermal and Structural Analysis of Brake DiscДокумент15 страницThermal and Structural Analysis of Brake DiscPaulWiseОценок пока нет
- On Teaching Finite Element Method in Plasticity With MathematicaДокумент10 страницOn Teaching Finite Element Method in Plasticity With MathematicayesullenОценок пока нет
- Theoretical Calculation of Strain Hardening ExponentДокумент4 страницыTheoretical Calculation of Strain Hardening ExponentRavi TejaОценок пока нет
- The Analysis of Vibrational Response of Structures With Uncertain ParametersДокумент8 страницThe Analysis of Vibrational Response of Structures With Uncertain ParametersEnrique Simbort ZeballosОценок пока нет
- l3 MaterialsДокумент32 страницыl3 MaterialsZaouiОценок пока нет
- PB 2 Rayleigh Ritz Method For General Plate Analysis 1993Документ6 страницPB 2 Rayleigh Ritz Method For General Plate Analysis 1993ciscoОценок пока нет
- Adobe Photoshop: The EditingДокумент10 страницAdobe Photoshop: The EditingMer Cjielo BalloonsОценок пока нет
- Data Collector 2.03.00Документ20 страницData Collector 2.03.00vyaskingОценок пока нет
- 1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesДокумент23 страницы1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesThanh XomОценок пока нет
- Physicaltestingofrubberrogerbrown2006 Book 150514103634 Lva1 App6892Документ389 страницPhysicaltestingofrubberrogerbrown2006 Book 150514103634 Lva1 App6892AbdelhamidHarratОценок пока нет
- What Is A Gantt Chart - Gantt Chart Information, History and SoftwareДокумент3 страницыWhat Is A Gantt Chart - Gantt Chart Information, History and SoftwareShaikh Saeed AlamОценок пока нет
- CS As Corporate Saviour - Oil and Gas Industry PDFДокумент48 страницCS As Corporate Saviour - Oil and Gas Industry PDFBalraj JОценок пока нет
- DiGas 4000 Light E 08.02Документ2 страницыDiGas 4000 Light E 08.02manit1963Оценок пока нет
- Evaporative Pre CoolerДокумент46 страницEvaporative Pre CoolerLizbeth Ramirez AlanyaОценок пока нет
- 200E ManualДокумент56 страниц200E ManualManoj KrishnanОценок пока нет
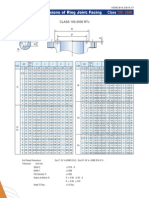
- RTJ Dimension ASME B16.5/B16.47Документ1 страницаRTJ Dimension ASME B16.5/B16.47parayilomer0% (1)
- You Yangs RP Visitor GuideДокумент2 страницыYou Yangs RP Visitor GuideSomaОценок пока нет
- Material Ease 20Документ7 страницMaterial Ease 20Sorin RipaОценок пока нет
- High Voltage Grease Reduces Wear and ArcingДокумент2 страницыHigh Voltage Grease Reduces Wear and ArcingtlnferreiraОценок пока нет
- GEC - Sample Resume For StudentsДокумент2 страницыGEC - Sample Resume For StudentsNiketОценок пока нет
- Implementing A Maintenance Strategic Plan Using TPM MethodologyДокумент13 страницImplementing A Maintenance Strategic Plan Using TPM MethodologyJeyson Lendro ParedesОценок пока нет
- QlassicДокумент31 страницаQlassicQila HusinОценок пока нет
- Petri Net Modeling and ApplicationsДокумент13 страницPetri Net Modeling and ApplicationsRishiraj SenguptaОценок пока нет
- Strahlenfolter Stalking - TI - Baker - UK Targeted Individuals Activism & Safety Watch - February 2013 - UktargetedindividualsДокумент3 страницыStrahlenfolter Stalking - TI - Baker - UK Targeted Individuals Activism & Safety Watch - February 2013 - UktargetedindividualsKarl-Hans-RohnОценок пока нет
- The Tongue Display Unit (TDU) For Electrotactile Spatiotemporal Pattern PresentationДокумент10 страницThe Tongue Display Unit (TDU) For Electrotactile Spatiotemporal Pattern PresentationFrancisco Vicent PachecoОценок пока нет
- Study of Buffer Overflows and Keyloggers in The Linux Operating SystemДокумент8 страницStudy of Buffer Overflows and Keyloggers in The Linux Operating Systemrobyrulz100% (1)
- A ProcessДокумент41 страницаA ProcessjulioОценок пока нет
- Electricity Scavenger HuntДокумент1 страницаElectricity Scavenger HuntksonicoОценок пока нет
- Stop Motion Pre Production - Negotiated BriefДокумент10 страницStop Motion Pre Production - Negotiated Briefp4nd3m0n1c100% (1)