Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- EE 435 SCR Notes3Документ32 страницыEE 435 SCR Notes3Dado GaudiОценок пока нет
- Introduction of Three Phase Half-Full Wave ConverterДокумент25 страницIntroduction of Three Phase Half-Full Wave ConverterlawahedОценок пока нет
- Dry Transformer Percent Impedance DefinitionДокумент3 страницыDry Transformer Percent Impedance Definitionsaga2000cnОценок пока нет
- Section 7 - InvertersДокумент54 страницыSection 7 - InvertersAlok KumarОценок пока нет
- Stiff or Weak GridДокумент2 страницыStiff or Weak GridBiljana Matić Čuka100% (1)
- Powell Technical Briefs - Combined 1-106Документ183 страницыPowell Technical Briefs - Combined 1-106Oscar Gálvez Iglesias100% (1)
- A Guide To Diagnostic Insulation Testing Above 1 KV - MEGGERДокумент40 страницA Guide To Diagnostic Insulation Testing Above 1 KV - MEGGERGustavo PérezОценок пока нет
- 3 Phase Full Wave Bridge ConverterДокумент55 страниц3 Phase Full Wave Bridge ConvertersubhasishpodderОценок пока нет
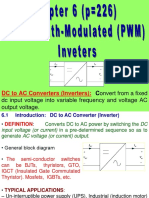
- Pe Chapter 6 DC Ac 1Документ32 страницыPe Chapter 6 DC Ac 1Muhammad UsamaОценок пока нет
- Texcan Teck Medium Voltage Shielded PDFДокумент13 страницTexcan Teck Medium Voltage Shielded PDFOscar Ordoñez VelasquezОценок пока нет
- Seminar On Ac - DC ConvertersДокумент33 страницыSeminar On Ac - DC ConvertersrsbecoolОценок пока нет
- Lecture6 Transformer PDFДокумент50 страницLecture6 Transformer PDFAhmad Akram100% (1)
- Application Considerations For High Resistance Ground Retrofits in Pulp and Paper MillsДокумент8 страницApplication Considerations For High Resistance Ground Retrofits in Pulp and Paper MillsLong LeoОценок пока нет
- BIL Levels For Switchgear - Siemens Tech Topics Rev 0Документ2 страницыBIL Levels For Switchgear - Siemens Tech Topics Rev 0Peter DyckОценок пока нет
- SYMMETRICAL COMPONENTS 1 and 2 IntroductДокумент32 страницыSYMMETRICAL COMPONENTS 1 and 2 IntroductAirep OiralihОценок пока нет
- Cooling Classes of TransformersДокумент2 страницыCooling Classes of TransformersDavidEnríquezОценок пока нет
- IE LAB3 MalibiranДокумент10 страницIE LAB3 MalibiranMary Jane MalibiranОценок пока нет
- UsingFusestoIncreaseSCCR PDFДокумент16 страницUsingFusestoIncreaseSCCR PDFKalpesh SinghОценок пока нет
- Inrush Current CalculationДокумент4 страницыInrush Current CalculationJournalNX - a Multidisciplinary Peer Reviewed JournalОценок пока нет
- Distribution Transformer CalculationsДокумент1 страницаDistribution Transformer CalculationsAli Mehmood MalhiОценок пока нет
- EE16411-Electrical Machines II LaboratoryДокумент220 страницEE16411-Electrical Machines II LaboratorySANTHOSHОценок пока нет
- Transformer Question BankДокумент5 страницTransformer Question Bankrinijain4450% (2)
- Ezct-Ezct2k Truns Ratio Testing Notes Rev 2Документ12 страницEzct-Ezct2k Truns Ratio Testing Notes Rev 2hizbi7Оценок пока нет
- Grid Integration To Weak GridsДокумент23 страницыGrid Integration To Weak Gridsanoopeluvathingal100100% (1)
- CHAPTER 2 TransformersДокумент70 страницCHAPTER 2 TransformersTom100% (1)
- Chapter 25 D.C. MachinesДокумент20 страницChapter 25 D.C. MachinesJosh'z LlamesОценок пока нет
- Open-Circuit or No-Load TestДокумент13 страницOpen-Circuit or No-Load TestNANDHAKUMAR AОценок пока нет
- 360 Topic 6 DC MachineДокумент33 страницы360 Topic 6 DC MachineAchsan ArfandiОценок пока нет
- Voltage Source InverterДокумент77 страницVoltage Source InverterSaied Aly SalamahОценок пока нет
- Solved Problems To Chapter 14Документ2 страницыSolved Problems To Chapter 14methoxy67% (3)
- Characteristics Power Systems Neutral Grounding Techniques Fact Fiction Ap083005enДокумент12 страницCharacteristics Power Systems Neutral Grounding Techniques Fact Fiction Ap083005enAhmedОценок пока нет
- 100 Percent Vs 80 Percent Breaker MythДокумент4 страницы100 Percent Vs 80 Percent Breaker Mythcow221100% (1)
- Analysis of Electric Machinery and Drive SystemsДокумент14 страницAnalysis of Electric Machinery and Drive Systemssrinivas naiduОценок пока нет
- 005 - 5kV To 27 KV SWGR (W Rev 1)Документ12 страниц005 - 5kV To 27 KV SWGR (W Rev 1)minhaj_kccОценок пока нет
- 06 Multiphase RectifierДокумент16 страниц06 Multiphase Rectifiersajid rafiqueОценок пока нет
- Paralleling Module APM2000 PDFДокумент4 страницыParalleling Module APM2000 PDFsareluis30Оценок пока нет
- Transformer - NT PDFДокумент108 страницTransformer - NT PDFReshab Sahoo100% (1)
- Zero Sequence DiagramДокумент2 страницыZero Sequence DiagramVerukv007Оценок пока нет
- Guide For Loading Mineral-Oil-Immersed Overhead A N D Pad-Mounted T Ri Utiontran OrmersДокумент26 страницGuide For Loading Mineral-Oil-Immersed Overhead A N D Pad-Mounted T Ri Utiontran OrmersEdna LópezОценок пока нет
- Chapter 15old PDFДокумент53 страницыChapter 15old PDFAbderrahmane WardiОценок пока нет
- AC CircuitsДокумент20 страницAC CircuitsNikhil GobhilОценок пока нет
- Transformer Losses CalculationДокумент4 страницыTransformer Losses CalculationRobert Marcolini100% (1)
- Cap 5Документ29 страницCap 5deberes ucacueОценок пока нет
- Calculating The Voltage Drop On Transformer Terminals PDFДокумент1 страницаCalculating The Voltage Drop On Transformer Terminals PDFOussama DerdecheОценок пока нет
- IEEMA-Basics of Dual Ratio TransformersДокумент3 страницыIEEMA-Basics of Dual Ratio TransformersHari Krishna.MОценок пока нет
- Presentation On 132 KV Chambal G.S.S., JaipurДокумент23 страницыPresentation On 132 KV Chambal G.S.S., JaipurDevendra Sharma100% (6)
- Steady-State Analysis of DC MotorsДокумент24 страницыSteady-State Analysis of DC MotorsUsama RaoОценок пока нет
- 45 5655 EE422 2016 1 1 1 Open Delta Transformers ConnectionДокумент17 страниц45 5655 EE422 2016 1 1 1 Open Delta Transformers ConnectionShyam RatanОценок пока нет
- IC 741 Op-Amp Tutorial and CharacteristicsДокумент5 страницIC 741 Op-Amp Tutorial and CharacteristicsBenОценок пока нет
- ReportДокумент83 страницыReportNikita SaxenaОценок пока нет
- 1.to Find Voltage Regulation of Single Phase TransformerДокумент7 страниц1.to Find Voltage Regulation of Single Phase Transformershahabrandhawa50% (2)
- ABB CV2D2J Auxiliary RelayДокумент8 страницABB CV2D2J Auxiliary Relayharp1230% (1)
- Transformer 1 2Документ94 страницыTransformer 1 2Tobi AQWОценок пока нет
- Why Transformer Does Not Work On DC Supply Instead of ACДокумент4 страницыWhy Transformer Does Not Work On DC Supply Instead of ACAHMED YOUSEFОценок пока нет
- Bushing CT PDFДокумент4 страницыBushing CT PDFgloby_pnbОценок пока нет
- Ppt. On Transformer WindingsДокумент23 страницыPpt. On Transformer WindingsSandhya Rathore100% (2)
- Chapter 4Документ41 страницаChapter 4Anil ParmarОценок пока нет
- Chapter 4 AC To AC Converters: OutlineДокумент25 страницChapter 4 AC To AC Converters: OutlinesambitОценок пока нет
- Ch9 AC To AC Converters: Classification AC Voltage Controllers AC Power ControllersДокумент26 страницCh9 AC To AC Converters: Classification AC Voltage Controllers AC Power Controllersherokaboss1987Оценок пока нет