Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Microelectronic CircuitsДокумент17 страницMicroelectronic Circuitsh7q29058724% (25)
- 11.5.1 Packet Tracer - Compare Layer 2 and Layer 3 Devices AnswerДокумент4 страницы11.5.1 Packet Tracer - Compare Layer 2 and Layer 3 Devices AnswerVinicio MartinezОценок пока нет
- Hajj and Umrah GuideДокумент2 страницыHajj and Umrah Guidesalemabu9Оценок пока нет
- IP Routing Technology Training Exam Paper (A) - QuestionДокумент8 страницIP Routing Technology Training Exam Paper (A) - QuestionGilles OssahОценок пока нет
- Eligible Topics (1 of 3) (Not An Exhaustive List)Документ4 страницыEligible Topics (1 of 3) (Not An Exhaustive List)salemabu9Оценок пока нет
- Tajweed Ul QuranДокумент80 страницTajweed Ul Quransalemabu90% (1)
- InteractiveSystemSizing1Документ1 страницаInteractiveSystemSizing1salemabu9Оценок пока нет
- New Desgined Solar PV Installation PDFДокумент124 страницыNew Desgined Solar PV Installation PDFsalemabu9Оценок пока нет
- PV System of 7kW Hybrid OffgridДокумент4 страницыPV System of 7kW Hybrid Offgridsalemabu9Оценок пока нет
- InteractiveSystemSizingДокумент1 страницаInteractiveSystemSizingsalemabu9Оценок пока нет
- Transliteration Rules - ArabicДокумент10 страницTransliteration Rules - ArabicavmyemailОценок пока нет
- Transliteration Rules - ArabicДокумент10 страницTransliteration Rules - ArabicavmyemailОценок пока нет
- Eligible Topics (1 of 3) (Not An Exhaustive List)Документ4 страницыEligible Topics (1 of 3) (Not An Exhaustive List)salemabu9Оценок пока нет
- Com PinesДокумент4 страницыCom Pinessalemabu9Оценок пока нет
- PoetryДокумент36 страницPoetryAbhay Vohra100% (22)
- Math For Kids PDFДокумент30 страницMath For Kids PDFsalemabu9100% (1)
- The Book of ZakaatДокумент97 страницThe Book of Zakaatsalemabu9Оценок пока нет
- Arabic LiteratureДокумент7 страницArabic Literaturesalemabu9Оценок пока нет
- Understand Arabic in 12 Coloured TablesДокумент36 страницUnderstand Arabic in 12 Coloured Tablesspeed2kx100% (1)
- Transliteration Rules - ArabicДокумент10 страницTransliteration Rules - ArabicavmyemailОценок пока нет
- شعر انجليزيДокумент284 страницыشعر انجليزيsalemabu9Оценок пока нет
- A Guide For The New MuslimДокумент249 страницA Guide For The New MuslimEbtessam100% (2)
- En Islam Is The Religion of PeaceДокумент116 страницEn Islam Is The Religion of Peaceravian95Оценок пока нет
- Islam and PeaceДокумент283 страницыIslam and Peacesalemabu9Оценок пока нет
- PoetryДокумент36 страницPoetryAbhay Vohra100% (22)
- From Motor Design To Motor ControlДокумент18 страницFrom Motor Design To Motor ControlPhạm Văn TưởngОценок пока нет
- From Motor Design To Motor ControlДокумент18 страницFrom Motor Design To Motor ControlPhạm Văn TưởngОценок пока нет
- Hajj BookДокумент18 страницHajj BookFarman RaoОценок пока нет
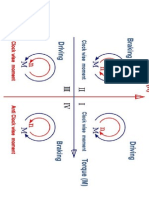
- Four Quadrant Motion Control of MotorДокумент1 страницаFour Quadrant Motion Control of Motorsalemabu9Оценок пока нет
- Islamic ArtДокумент8 страницIslamic Artsalemabu9Оценок пока нет
- DCDC Power Converter For Photovoltaic ApplicationsДокумент1 страницаDCDC Power Converter For Photovoltaic Applicationssalemabu9Оценок пока нет
- MD FarhanДокумент10 страницMD FarhanhasibhamidulОценок пока нет
- Mpls L2Vpn: Comparison With Traditional VPNДокумент5 страницMpls L2Vpn: Comparison With Traditional VPNXoneXОценок пока нет
- Plano de Estudos 2022 Comunidade Cisco HackoneДокумент21 страницаPlano de Estudos 2022 Comunidade Cisco HackonepatrickluizjОценок пока нет
- Campus Wired LAN Design GuideДокумент96 страницCampus Wired LAN Design GuideHOyedeme KollinsОценок пока нет
- ComputerNetworks ClassTest2 SolutionsДокумент3 страницыComputerNetworks ClassTest2 Solutionshuyencttde180614Оценок пока нет
- SonicWALL PRO 4060 Getting Started GuideДокумент30 страницSonicWALL PRO 4060 Getting Started Guideogr209Оценок пока нет
- Coen366 Module1Документ89 страницCoen366 Module1tenzabestОценок пока нет
- Networks LabsДокумент62 страницыNetworks LabsGautham KannanОценок пока нет
- Data Sheet ASR1002Документ19 страницData Sheet ASR1002Pravin RedekarОценок пока нет
- Manipulating Routing Updates: CCNP ROUTE: Implementing IP RoutingДокумент104 страницыManipulating Routing Updates: CCNP ROUTE: Implementing IP RoutingAlejandro Cordero OrdoñezОценок пока нет
- Quick Installation Guide: Connect The HardwareДокумент2 страницыQuick Installation Guide: Connect The HardwareGuillermo ParraОценок пока нет
- DataCom&Net1 - Midterm Quiz 1Документ14 страницDataCom&Net1 - Midterm Quiz 1RianneNaelОценок пока нет
- MKS TFT28 32 V3.0 DatasheetДокумент32 страницыMKS TFT28 32 V3.0 DatasheetThiago CerqueiraОценок пока нет
- MPLS Lab Setup - MikroTik WikiДокумент7 страницMPLS Lab Setup - MikroTik Wikilets tryОценок пока нет
- Network Design: Networking 101Документ68 страницNetwork Design: Networking 101ziamalkoОценок пока нет
- World Wide WebДокумент23 страницыWorld Wide WebJoyce TenorioОценок пока нет
- Fault Tolerant Ethernet Bridge Implementation GuideДокумент108 страницFault Tolerant Ethernet Bridge Implementation GuideBouazzaОценок пока нет
- Automating Ip Networks With Python v2 PDFДокумент32 страницыAutomating Ip Networks With Python v2 PDFFetra HARRIОценок пока нет
- Soal Dan Jawaban MTCNAДокумент17 страницSoal Dan Jawaban MTCNAYudha NugrahaОценок пока нет
- 15IF11 Multicore E PDFДокумент14 страниц15IF11 Multicore E PDFRakesh VenkatesanОценок пока нет
- Installation Guide ENISDN ZTE AntelДокумент28 страницInstallation Guide ENISDN ZTE AntelJorge CabralОценок пока нет
- Comp TIAДокумент71 страницаComp TIAxterminal01Оценок пока нет
- Netgate XG 1537 Datasheet v4Документ5 страницNetgate XG 1537 Datasheet v4fateh tiribarkОценок пока нет
- Comparative Study Between Dynamic Ipv6 Routing Protocols of Distance Vectors and Link StatesДокумент6 страницComparative Study Between Dynamic Ipv6 Routing Protocols of Distance Vectors and Link Stateskhalido2Оценок пока нет
- Syllabus PTSV3 PDFДокумент19 страницSyllabus PTSV3 PDFZakaria KhayiouiОценок пока нет
- CX82310 CX82310 CX82310 CX82310Документ50 страницCX82310 CX82310 CX82310 CX82310Abhilash GowdaОценок пока нет
- Implementation of MPLS L3VPN Using GNS3: Akshay, Pooja AhlawatДокумент5 страницImplementation of MPLS L3VPN Using GNS3: Akshay, Pooja AhlawatDavidОценок пока нет
- Implementing Cisco SD-WAN Solutions (ENSDWI)Документ43 страницыImplementing Cisco SD-WAN Solutions (ENSDWI)dany sayedОценок пока нет