Вам также может понравиться
- Infografia ABReto-Desayuno SaludableДокумент1 страницаInfografia ABReto-Desayuno SaludableLUIS QUISPE RUAОценок пока нет
- Catalogo POSДокумент7 страницCatalogo POSFrancisco CatalánОценок пока нет
- Brief OficialДокумент3 страницыBrief OficialKatherine OrtizОценок пока нет
- El Ultimo Plantagenet - Sandra WorthДокумент226 страницEl Ultimo Plantagenet - Sandra Worthowen100% (1)
- Manual de Usuario DVR04HFA Version 4.0 201105Документ170 страницManual de Usuario DVR04HFA Version 4.0 201105dario_97Оценок пока нет
- Molino de MaderaДокумент10 страницMolino de MaderaMario ÁlvarezОценок пока нет
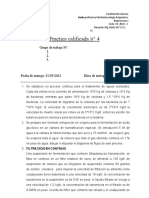
- Practica Calificada 4 Bio Procesos IДокумент2 страницыPractica Calificada 4 Bio Procesos ISharon AlessandraОценок пока нет
- Tema 4 Acepta A Jesús Como Tu SalvadorДокумент2 страницыTema 4 Acepta A Jesús Como Tu SalvadorsaulОценок пока нет
- Critica Del Pensamiento Amoroso (4g) 8.inddДокумент8 страницCritica Del Pensamiento Amoroso (4g) 8.inddMaria del Pilar Cordero Fernandez100% (2)
- Plan Perfecto de DiosДокумент2 страницыPlan Perfecto de DiosDavid RiveraОценок пока нет
- Churyumov GerasimenkoДокумент4 страницыChuryumov GerasimenkoAntonio TreminiОценок пока нет
- Normas de Elaboración de Proyectos Del Instituto Universitario Tecnológico de Los LlanosДокумент27 страницNormas de Elaboración de Proyectos Del Instituto Universitario Tecnológico de Los LlanosAnnys Rocio PerezОценок пока нет
- Pruebas de AislamientoДокумент9 страницPruebas de AislamientoELKIN FABIAN ACOSTA OJEDA100% (1)
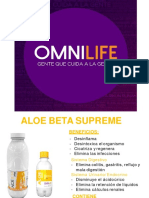
- Catalogo Omnilife Peru 2021Документ34 страницыCatalogo Omnilife Peru 2021Ricardo Manosalva0% (1)
- 2° Lectura 1 BIMДокумент3 страницы2° Lectura 1 BIMXnaxx AngelaОценок пока нет
- Liderazgo e InnovaciónДокумент38 страницLiderazgo e InnovaciónIan Dnvn VrtdlОценок пока нет
- Presentac Planificac Control Gestión 31-10-22Документ16 страницPresentac Planificac Control Gestión 31-10-22Arantxita OlivesОценок пока нет
- Juan Jose Reyes Patria FinalДокумент37 страницJuan Jose Reyes Patria Finalalberto parraОценок пока нет
- La Dimensión Religiosa Del Hombre PDFДокумент4 страницыLa Dimensión Religiosa Del Hombre PDFjimmyromero91Оценок пока нет
- AxiologiaДокумент4 страницыAxiologiaromarioОценок пока нет
- AutobiografíaДокумент3 страницыAutobiografíaSalim Murcia RosasОценок пока нет
- Como Se Genera La ElectricidadДокумент3 страницыComo Se Genera La ElectricidadAlexis GarciaОценок пока нет
- AlumnosTema 1Документ12 страницAlumnosTema 1Diego Jiménez AguadoОценок пока нет
- Instructivo para La Elaboracion de Proyectos Iutai-Ver 1.0Документ50 страницInstructivo para La Elaboracion de Proyectos Iutai-Ver 1.0Joaura Jakeline Romero AlvarezОценок пока нет
- Lecciones de Medicina Legal Del 13-1Документ2 страницыLecciones de Medicina Legal Del 13-1Lucas LopezОценок пока нет
- Grafologia PDFДокумент77 страницGrafologia PDFJANNОценок пока нет
- Caso Tulia Ibad - Rol TuliaДокумент4 страницыCaso Tulia Ibad - Rol TuliaMatias Ezequiel Poggi100% (1)
- Quebrantando MaldicionesДокумент6 страницQuebrantando MaldicionesJesusA7100% (1)
- SAP Alava 19 de Octubre de 2010Документ4 страницыSAP Alava 19 de Octubre de 2010jesus_alfaro6772Оценок пока нет
- Manual Motor Diesel John Deere - Clarke PDFДокумент48 страницManual Motor Diesel John Deere - Clarke PDFCésar Jc100% (2)