Вам также может понравиться
- Instructivo IntegracionДокумент5 страницInstructivo IntegracionAlexis VladimirОценок пока нет
- Gama MicrocontroladoresДокумент3 страницыGama MicrocontroladoresAlexis VladimirОценок пока нет
- KUKA Primer InformeДокумент47 страницKUKA Primer InformeAlexis VladimirОценок пока нет
- Bosque TropicalДокумент22 страницыBosque TropicalAlexis VladimirОценок пока нет
- Redes Neuronales (Astrofisica)Документ42 страницыRedes Neuronales (Astrofisica)Alexis VladimirОценок пока нет
- Modelamiento PaperДокумент6 страницModelamiento PaperAlexis VladimirОценок пока нет
- Memoria DescriptivaДокумент7 страницMemoria DescriptivaAlexis VladimirОценок пока нет
- Propiedades Ópticas de Las Ondas de RadioДокумент5 страницPropiedades Ópticas de Las Ondas de RadioAlexis VladimirОценок пока нет
- Anexo B2 Aplicacion de IEC LAMTD VDFДокумент16 страницAnexo B2 Aplicacion de IEC LAMTD VDFVon PereiraОценок пока нет
- Sensores GasДокумент7 страницSensores GasLuis Israel Quinga AcostaОценок пока нет
- Mario Bonilla Sarta - de - PerforacionДокумент48 страницMario Bonilla Sarta - de - PerforacionRodrigo Bravo Rodrigo BravoОценок пока нет
- Potencial Electrico Taller 2Документ1 страницаPotencial Electrico Taller 2valentinaОценок пока нет
- Práctica de Laboratorio3 - Perdidas Por FricciónДокумент4 страницыPráctica de Laboratorio3 - Perdidas Por FricciónKevin MogrovejoОценок пока нет
- Listas de Cotejo CCДокумент6 страницListas de Cotejo CCruben saraya pilcoОценок пока нет
- Uv-Vis Reflectancia DifusaДокумент5 страницUv-Vis Reflectancia DifusaDamian ezequiel BenitoОценок пока нет
- Weg Motores Catalogo W22-Weg Mercado PeruanoДокумент16 страницWeg Motores Catalogo W22-Weg Mercado PeruanoRenato Romulo Ramos DiazОценок пока нет
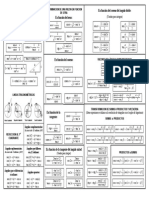
- Formulario TrigonometríaДокумент2 страницыFormulario TrigonometríaLuis Roberto Montejo Diaz83% (6)
- Funcionamiento y Regulación de Las Suspensiones en La MotoДокумент15 страницFuncionamiento y Regulación de Las Suspensiones en La MotoSportourer Tienda MoteraОценок пока нет
- La Nevera de Albescribeert Einstein y La Época Menos Conocida Del Científico Más FamosoДокумент6 страницLa Nevera de Albescribeert Einstein y La Época Menos Conocida Del Científico Más FamosoJOSE LOPEZОценок пока нет
- Cap II DisolucionesДокумент128 страницCap II DisolucionesLuisQuiñones100% (1)
- Actividades ResueltasДокумент7 страницActividades ResueltasSara Lzo Guerra0% (1)
- Soluciones 6equilibrio PDFДокумент20 страницSoluciones 6equilibrio PDFrosa75% (12)
- Compuerta Metálica de Tubería AAДокумент14 страницCompuerta Metálica de Tubería AAFime SlgОценок пока нет
- Arévalo Cea, Jessica MagaliДокумент113 страницArévalo Cea, Jessica MagaliKaren G RamosОценок пока нет
- P A V I M e N T o SДокумент44 страницыP A V I M e N T o SJuan Carlos Baltazar CastellónОценок пока нет
- Ley de CoulombДокумент4 страницыLey de CoulombMerizalde JuanОценок пока нет
- Potenciales de Liénard-Wiechert - Wikipedia, La Enciclopedia LibreДокумент4 страницыPotenciales de Liénard-Wiechert - Wikipedia, La Enciclopedia LibrecibeyoОценок пока нет
- Unidad 9 - Funciones Lineales y AfinesДокумент7 страницUnidad 9 - Funciones Lineales y AfinesbemdasОценок пока нет
- Gradientes UniformesДокумент13 страницGradientes UniformesAlejandra Roldan AmayaОценок пока нет
- Solemne3 SolucionesДокумент9 страницSolemne3 SolucionesKatanОценок пока нет
- Diseño de Vigas Por CapacidadДокумент17 страницDiseño de Vigas Por CapacidadMichu AguilarОценок пока нет
- Solución Física Fase 5Документ27 страницSolución Física Fase 5Anonymous AAuggII1PОценок пока нет
- Guardamotores ABB CatalogoДокумент19 страницGuardamotores ABB CatalogoLuis Lara100% (1)
- Flujo de TuberiasДокумент3 страницыFlujo de TuberiasJordy Panta SaldarriagaОценок пока нет
- Experimento Amplificadores FetДокумент11 страницExperimento Amplificadores FetjefersonОценок пока нет
- Manual Del Fabricante 8-11Документ430 страницManual Del Fabricante 8-11Leonel Ruiz100% (3)
- Transportador de CadenaДокумент61 страницаTransportador de CadenaCésar Carmona Bernilla100% (1)