Вам также может понравиться
- Plmat 2019 CoverageДокумент2 страницыPlmat 2019 CoverageAsher Manangan52% (25)
- Literal Equations Name ProjectДокумент4 страницыLiteral Equations Name Projectapi-297789948Оценок пока нет
- Acdc - DC Motor - Lecture Notes 4Документ34 страницыAcdc - DC Motor - Lecture Notes 4Cllyan ReyesОценок пока нет
- Formula SheetДокумент1 страницаFormula SheetSaleem SheikhОценок пока нет
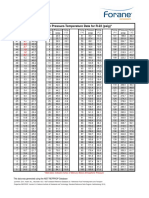
- Forane 22 Saturation Pressure Temperature DataДокумент1 страницаForane 22 Saturation Pressure Temperature Datavineeth100% (1)
- DC MotorДокумент47 страницDC MotorArun SaraswathyОценок пока нет
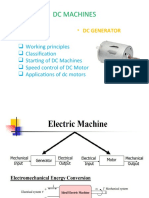
- DC MachinesДокумент49 страницDC MachinesAshfaq AbibОценок пока нет
- DC Machines Fundamentals and ClassificationДокумент67 страницDC Machines Fundamentals and ClassificationAly Ashraf100% (1)
- 151-EE-306-01-03-DC Machines2Документ71 страница151-EE-306-01-03-DC Machines2Aly AshrafОценок пока нет
- DC Machine PDFДокумент35 страницDC Machine PDFPulkit Kumar Chauhan92% (24)
- Lecture DC MachinesДокумент40 страницLecture DC MachinesgeslincarlombetahОценок пока нет
- Electrical Machines-I IIIДокумент55 страницElectrical Machines-I IIIadityassripadaОценок пока нет
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeДокумент30 страницModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoОценок пока нет
- DC Motors: - Construction Very Similar To A DC GeneratorДокумент35 страницDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- DC Machines: Understanding the Basic Principles and ComponentsДокумент44 страницыDC Machines: Understanding the Basic Principles and ComponentsB AnandОценок пока нет
- 306 DC Machines PDFДокумент95 страниц306 DC Machines PDFAlaa JawadОценок пока нет
- Speed DC MotorДокумент35 страницSpeed DC MotorDienar Adiose AljahezОценок пока нет
- Electric Machine: DC MotorДокумент42 страницыElectric Machine: DC Motorteza maruОценок пока нет
- DC MotorДокумент38 страницDC MotorasuypowerОценок пока нет
- DC MachinesДокумент44 страницыDC Machinesselvithimmarajan@gmail.comОценок пока нет
- A698111855 - 16061 - 12 - 2019 - Unit 3 - 2.Документ30 страницA698111855 - 16061 - 12 - 2019 - Unit 3 - 2.mat mrkОценок пока нет
- Gnerator +motor RevisedДокумент182 страницыGnerator +motor RevisedkkОценок пока нет
- DC MachinesДокумент36 страницDC Machinespand09Оценок пока нет
- Direct Current Motor: UNIT-9Документ19 страницDirect Current Motor: UNIT-9Keshav RathiОценок пока нет
- Bab 2-DC MOTORДокумент35 страницBab 2-DC MOTORAfieza TumijanОценок пока нет
- DC DriveДокумент36 страницDC DriveferdiОценок пока нет
- EV Class NotesДокумент30 страницEV Class NotesVinod BabaleshwarОценок пока нет
- Mesin Arus SearahДокумент23 страницыMesin Arus SearahboypardedeОценок пока нет
- BARHAV1Документ12 страницBARHAV1Barhav SarbastОценок пока нет
- An Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorДокумент34 страницыAn Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorP.s. PeriasamyОценок пока нет
- Power Generator For MT-8BДокумент60 страницPower Generator For MT-8BTyan ScreamouscoreОценок пока нет
- DC Generators: - IntroductionДокумент40 страницDC Generators: - IntroductionADDIS JOHNОценок пока нет
- Laboratory Session 5 Magnetization Curve of A DC GeneratorДокумент7 страницLaboratory Session 5 Magnetization Curve of A DC GeneratorNatan Bravo GarridoОценок пока нет
- DC MachineДокумент33 страницыDC MachineSlim ShaddysОценок пока нет
- Energy ConversionДокумент134 страницыEnergy ConversionElah TenderoОценок пока нет
- DC Motor: Dr. Mohammed Moshiul HoqueДокумент43 страницыDC Motor: Dr. Mohammed Moshiul Hoquesagar378Оценок пока нет
- Lecture-8DC MachinesДокумент55 страницLecture-8DC MachinesBisrat TeferiОценок пока нет
- ECE Electrical Engineering 2 Marks PDFДокумент22 страницыECE Electrical Engineering 2 Marks PDFsivagamiОценок пока нет
- Topic 2. DC Machines Part II - DC Motor 2019Документ75 страницTopic 2. DC Machines Part II - DC Motor 2019Lim Kai XuanОценок пока нет
- Chapter 1 DC Drives Part2Документ75 страницChapter 1 DC Drives Part2Mohammad MunzirОценок пока нет
- Machines Enercon 2 PDFДокумент42 страницыMachines Enercon 2 PDFChanning TatumОценок пока нет
- Chapter-5 Synchronous MacineДокумент30 страницChapter-5 Synchronous MacineAman BazeОценок пока нет
- DC Generator and Motor FundamentalsДокумент234 страницыDC Generator and Motor Fundamentals413 YASH MANE100% (1)
- PPT F2 Meet 13 Per EM Motor ListrikДокумент73 страницыPPT F2 Meet 13 Per EM Motor ListrikIftitah ImawatiОценок пока нет
- Induction MotorДокумент39 страницInduction MotorAhmed MagdyОценок пока нет
- DC Generator: 1 Electrical MachinesДокумент43 страницыDC Generator: 1 Electrical MachinesJustin MercadoОценок пока нет
- Energy Conversion One: Chapter NineДокумент15 страницEnergy Conversion One: Chapter NineSneh Deep SKОценок пока нет
- Theory of DC Machines PDFДокумент58 страницTheory of DC Machines PDFGoitom Tadesse100% (2)
- DC Machine-1Документ37 страницDC Machine-1faqhrulОценок пока нет
- Electrical Eng NewДокумент141 страницаElectrical Eng NewDianne GawdanОценок пока нет
- A Short Course On Synchronous Machines and Synchronous CondensersДокумент109 страницA Short Course On Synchronous Machines and Synchronous Condensersflywheel2006Оценок пока нет
- Chapter 4 - Synchronous GeneratorsДокумент21 страницаChapter 4 - Synchronous GeneratorsnehmeОценок пока нет
- DC MOTORS AND GENERATORS: TERMINAL CHARACTERISTICS AND SPEED CONTROLДокумент15 страницDC MOTORS AND GENERATORS: TERMINAL CHARACTERISTICS AND SPEED CONTROLptarwatkar123Оценок пока нет
- Chapter 4 DC MachinesДокумент80 страницChapter 4 DC MachinesKorsa KorsaОценок пока нет
- AEEE 352 Assignment 3Документ10 страницAEEE 352 Assignment 3mchris91Оценок пока нет
- Electrical MachinesДокумент38 страницElectrical Machineshephzi28Оценок пока нет
- 110 Waveform Generator Projects for the Home ConstructorОт Everand110 Waveform Generator Projects for the Home ConstructorРейтинг: 4 из 5 звезд4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Group D RRB OCt 03Документ5 страницGroup D RRB OCt 03selraj0708Оценок пока нет
- Paper RRB Group DДокумент4 страницыPaper RRB Group Dselraj0708Оценок пока нет
- ICHQP Facts PresentationДокумент62 страницыICHQP Facts PresentationsirishaОценок пока нет
- 2015 Conducted by Quest Global, Bengaluru at National LevelДокумент7 страниц2015 Conducted by Quest Global, Bengaluru at National Levelselraj0708Оценок пока нет
- Bonding and GroundingДокумент61 страницаBonding and GroundingGeorge Asuncion100% (1)
- Synchronous Reluctance Motor - PPSXДокумент22 страницыSynchronous Reluctance Motor - PPSXselraj0708Оценок пока нет
- 02 Nov 2014 English Paper RRB Group DДокумент14 страниц02 Nov 2014 English Paper RRB Group DVijay MОценок пока нет
- Bureau of Indian Standards: Central Marks Department - IiiДокумент6 страницBureau of Indian Standards: Central Marks Department - IiiVaiby CoolОценок пока нет
- Prepared by Asad Hussain 2011-EE-176 University of Engineering and Technology, LahoreДокумент28 страницPrepared by Asad Hussain 2011-EE-176 University of Engineering and Technology, Lahoreselraj0708Оценок пока нет
- IEEE Grounding TransformersДокумент45 страницIEEE Grounding TransformersbulmoongchiОценок пока нет
- Regulation of AlternatorsДокумент3 страницыRegulation of Alternatorsrakeshkr07Оценок пока нет
- Conductor Joints PDFДокумент73 страницыConductor Joints PDFselraj0708Оценок пока нет
- Regulation of AlternatorsДокумент3 страницыRegulation of Alternatorsrakeshkr07Оценок пока нет
- Regulation of AlternatorsДокумент3 страницыRegulation of Alternatorsrakeshkr07Оценок пока нет
- Direct - Current Motor Characteristics and ApplicationsДокумент58 страницDirect - Current Motor Characteristics and ApplicationsMaman SomantriОценок пока нет
- 02-1 Synchronous MachinesДокумент48 страниц02-1 Synchronous MachinesvenikiranОценок пока нет
- Renewable EnergyДокумент9 страницRenewable Energyselraj0708Оценок пока нет
- Electrical Engineering NotesДокумент79 страницElectrical Engineering Notesselraj0708Оценок пока нет
- Synchronous - Induction MotorsДокумент1 страницаSynchronous - Induction Motorsselraj0708Оценок пока нет
- Professional Ethics and Human Values PDFДокумент80 страницProfessional Ethics and Human Values PDFprabu06051984Оценок пока нет
- Facts QuestionsbankДокумент7 страницFacts Questionsbankjaackson10Оценок пока нет
- Tutorial SimcouplerДокумент9 страницTutorial Simcouplerk7thakarОценок пока нет
- Journal ListДокумент13 страницJournal Listselraj0708Оценок пока нет
- Eee 5 8semДокумент57 страницEee 5 8semvimindianОценок пока нет
- Psim ManualДокумент126 страницPsim Manualht_fernandesОценок пока нет
- Facts QuestionsbankДокумент7 страницFacts Questionsbankjaackson10Оценок пока нет
- M &I Viva VoceДокумент6 страницM &I Viva Voceselraj0708Оценок пока нет
- Design and Fabrication of Plastic Bottle and Can Crusher For Recycling PurposeДокумент3 страницыDesign and Fabrication of Plastic Bottle and Can Crusher For Recycling PurposeInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Project Avoidance MEMS Dielectric ChargeДокумент17 страницProject Avoidance MEMS Dielectric ChargeNguyễn Viết HuyОценок пока нет
- Raft Footing FlowchartДокумент4 страницыRaft Footing FlowchartVinith Krishna100% (1)
- Quantum Physics Practice QuestionsДокумент2 страницыQuantum Physics Practice QuestionsKrizzi Dizon GarciaОценок пока нет
- Physics Investigatory Project: Electromagnetic InductionДокумент16 страницPhysics Investigatory Project: Electromagnetic InductionRajesh ChoudharyОценок пока нет
- 218Документ261 страница218Ikhlas KittaОценок пока нет
- Quantum NumbersДокумент2 страницыQuantum NumbersWong Weng SiongОценок пока нет
- Application of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielДокумент5 страницApplication of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielWegiDwiSaptoОценок пока нет
- Chapter 1Документ55 страницChapter 1nur izzah fatiniОценок пока нет
- Profile of Albert EinsteinДокумент4 страницыProfile of Albert Einsteinfirstman31Оценок пока нет
- Numerical Simulation of Ultrasonic Wave Propagation in Flawed DomainДокумент4 страницыNumerical Simulation of Ultrasonic Wave Propagation in Flawed DomainGrit WingsОценок пока нет
- Helium Pycnometry Density TestДокумент2 страницыHelium Pycnometry Density TestDapoer OmaOpa100% (1)
- Becker 1987Документ16 страницBecker 1987Luis Fernando Vergaray AstupiñaОценок пока нет
- Grounding - Industry Experiences - 2013Документ292 страницыGrounding - Industry Experiences - 2013Minhthien NguyenОценок пока нет
- IME Micro ProjectДокумент4 страницыIME Micro Projectshubhamghodekar76Оценок пока нет
- Lateral Electromagnetic Waves Theory and Applications To Communications, Geophysical Exploration, and Remote SensingДокумент770 страницLateral Electromagnetic Waves Theory and Applications To Communications, Geophysical Exploration, and Remote SensingBélaid Hocine AnisОценок пока нет
- HW3 - Solutions (Sec 21)Документ3 страницыHW3 - Solutions (Sec 21)Joichiro NishiОценок пока нет
- Curl and DivergenceДокумент5 страницCurl and DivergenceChernet TugeОценок пока нет
- Fourier's Law Heat Transfer ExperimentДокумент7 страницFourier's Law Heat Transfer ExperimentAman SinhaОценок пока нет
- Rebar Pullout Testing PDFДокумент6 страницRebar Pullout Testing PDFsami_bangash_1Оценок пока нет
- Chemical Thermodynamics: Module - 4Документ25 страницChemical Thermodynamics: Module - 4TeachingTrainingCoaching KnowledgeSharingSessionОценок пока нет
- Assignment 1 (ELE8306 - 21)Документ5 страницAssignment 1 (ELE8306 - 21)umarsaboОценок пока нет
- Higher efficiency synchronous motors for industrial applicationsДокумент6 страницHigher efficiency synchronous motors for industrial applicationsAmirОценок пока нет
- Chapter 1 Units and VectorsДокумент33 страницыChapter 1 Units and VectorslozzzzzОценок пока нет
- Kid-sized humanoid robot design paperДокумент4 страницыKid-sized humanoid robot design paperHimanshu VermaОценок пока нет
- Bunker DesignДокумент25 страницBunker DesignswatkoolОценок пока нет