Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Vehicle Dynamics Lecture05Документ28 страницVehicle Dynamics Lecture05Rahul KadbeОценок пока нет
- Terminology of Helical SpringДокумент4 страницыTerminology of Helical Springsandeep c sОценок пока нет
- Arta211 MidtermsДокумент2 страницыArta211 MidtermsWallen LagradaОценок пока нет
- Experimestnt 1 (Structure Lab)Документ32 страницыExperimestnt 1 (Structure Lab)AZem AziZi Mirza50% (2)
- Some Practical Laboratory ExperimentsДокумент15 страницSome Practical Laboratory ExperimentsZwinky ManlaiОценок пока нет
- 4.3 Forced WavesДокумент23 страницы4.3 Forced WavesPritib KumarОценок пока нет
- ReiewДокумент19 страницReiewcullen bohannonОценок пока нет
- Revent Us 723 Hirez 1Документ2 страницыRevent Us 723 Hirez 1Umma NakhlunОценок пока нет
- 2013 Shear Strength of Brick Masonry Walls Assembled With Different Types of MortarДокумент8 страниц2013 Shear Strength of Brick Masonry Walls Assembled With Different Types of MortarCatherineОценок пока нет
- On A Stress Resultant Geometrically Exact Shell Model Part IДокумент38 страницOn A Stress Resultant Geometrically Exact Shell Model Part IzojdbergОценок пока нет
- Scope TC 9124Документ1 страницаScope TC 9124Esscon Engineering Services Pvt. Ltd.Оценок пока нет
- Seminar Report SampleДокумент22 страницыSeminar Report SampleDhruve EBОценок пока нет
- Comput. Methods Appl. Mech. Engrg.: Sam Cuvilliez, Frédéric Feyel, Eric Lorentz, Sylvie Michel-PonnelleДокумент16 страницComput. Methods Appl. Mech. Engrg.: Sam Cuvilliez, Frédéric Feyel, Eric Lorentz, Sylvie Michel-PonnellengОценок пока нет
- MASERДокумент23 страницыMASERMuzzamil ShaikhОценок пока нет
- PADT TheFocus 35 PDFДокумент18 страницPADT TheFocus 35 PDFDipak BorsaikiaОценок пока нет
- Lecture 1 - Introduction To Engineering OptimizationДокумент57 страницLecture 1 - Introduction To Engineering OptimizationTafesse100% (1)
- AnatoFisio VestibularДокумент17 страницAnatoFisio VestibularRocío YáñezОценок пока нет
- 18.06 Problem Set 3 SolutionsДокумент5 страниц18.06 Problem Set 3 SolutionsgadasОценок пока нет
- Disentangling Classical and Bayesian Approaches To Uncertainty AnalysisДокумент19 страницDisentangling Classical and Bayesian Approaches To Uncertainty Analysiszilangamba_s4535Оценок пока нет
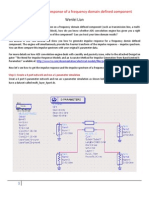
- Impulse Response of Frequency Domain ComponentДокумент17 страницImpulse Response of Frequency Domain Componentbubo28Оценок пока нет
- Modeling of Temperature Distributions in Canned Tomato Based Dip During Industrial PasteurizationДокумент7 страницModeling of Temperature Distributions in Canned Tomato Based Dip During Industrial PasteurizationHugo GermaniОценок пока нет
- Op Protection KIДокумент5 страницOp Protection KIDragan IlicОценок пока нет
- Engineering Material Specification: Approval From The Sheet Metal Tech ClubДокумент8 страницEngineering Material Specification: Approval From The Sheet Metal Tech ClubaldairlopesОценок пока нет
- Stats 100A Hw1Документ2 страницыStats 100A Hw1Billy BobОценок пока нет
- Payable Salary Paid SalaryДокумент2 страницыPayable Salary Paid SalaryAhmed AmmanОценок пока нет
- Mills - CatalogДокумент4 страницыMills - Catalogdéborah_rosalesОценок пока нет
- Bryton Williamson - Percent - Composition PracticeДокумент2 страницыBryton Williamson - Percent - Composition PracticeBryton WilliamsonОценок пока нет
- Mark Scheme For Papers 1 and 2: Science TestsДокумент60 страницMark Scheme For Papers 1 and 2: Science TestsDavid MagasinОценок пока нет
- Osmosis LabДокумент3 страницыOsmosis LabMutuluShakurОценок пока нет
- Strings, Chains, and Ropes: SIAM Review December 2006Документ12 страницStrings, Chains, and Ropes: SIAM Review December 2006Hemendra PrasannaОценок пока нет