Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Stripping For ReprobingДокумент2 страницыStripping For ReprobingStella SalvatoreОценок пока нет
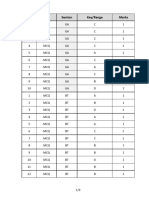
- Q.No. Type Section Key/Range MarksДокумент3 страницыQ.No. Type Section Key/Range Marksbiotech_vidhyaОценок пока нет
- Stripping For ReprobingДокумент2 страницыStripping For ReprobingStella SalvatoreОценок пока нет
- Facs ProtocolДокумент7 страницFacs ProtocolmisterxОценок пока нет
- Troubleshooting SDS-PAGE 1Документ3 страницыTroubleshooting SDS-PAGE 1biotech_vidhyaОценок пока нет
- BT 2019Документ13 страницBT 2019biotech_vidhyaОценок пока нет
- Buffer Preparation PDFДокумент6 страницBuffer Preparation PDFbiotech_vidhyaОценок пока нет
- Components Reaction MixtureДокумент3 страницыComponents Reaction Mixturebiotech_vidhyaОценок пока нет
- SDS PageДокумент2 страницыSDS Pagebiotech_vidhyaОценок пока нет
- Polymerase Chain Reaction (PCR)Документ3 страницыPolymerase Chain Reaction (PCR)biotech_vidhyaОценок пока нет
- Polymerasen GuideДокумент16 страницPolymerasen Guidebiotech_vidhyaОценок пока нет
- A.E. (Mechanical Engineering I) 2007Документ24 страницыA.E. (Mechanical Engineering I) 2007Mukesh KumarОценок пока нет
- Brad FordДокумент12 страницBrad FordQi ChaoОценок пока нет
- Buffer Preparation PDFДокумент6 страницBuffer Preparation PDFbiotech_vidhyaОценок пока нет
- Qpaper PondyДокумент21 страницаQpaper Pondybiotech_vidhyaОценок пока нет
- Whole Cell ExtractДокумент1 страницаWhole Cell Extractbiotech_vidhyaОценок пока нет
- Nuclear ExtractsДокумент2 страницыNuclear Extractsbiotech_vidhyaОценок пока нет
- Ies 17 Set A Me Q AДокумент67 страницIes 17 Set A Me Q Abiotech_vidhyaОценок пока нет
- TNPSC Group 1 Prelim Book List PDFДокумент2 страницыTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaОценок пока нет
- TNPSC Group 1 Prelim Book List PDFДокумент2 страницыTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaОценок пока нет
- Img Word-To PDFДокумент3 страницыImg Word-To PDFbiotech_vidhyaОценок пока нет
- TDC 41597 A (Mechanical Engg.) - 2012Документ20 страницTDC 41597 A (Mechanical Engg.) - 2012biotech_vidhyaОценок пока нет
- Mechanical Engineering Code No. 14: Combined Competitive (Preliminary) Examination, 2010Документ20 страницMechanical Engineering Code No. 14: Combined Competitive (Preliminary) Examination, 2010biotech_vidhyaОценок пока нет
- TNPSC Group 1 Prelim Book List PDFДокумент2 страницыTNPSC Group 1 Prelim Book List PDFbiotech_vidhyaОценок пока нет
- Ese 2017 Prelims Mechanical Engineering Paper SolutionДокумент52 страницыEse 2017 Prelims Mechanical Engineering Paper SolutionpataОценок пока нет
- Qpaper PondyДокумент21 страницаQpaper Pondybiotech_vidhyaОценок пока нет
- Befcv List PDFДокумент22 страницыBefcv List PDFbiotech_vidhyaОценок пока нет
- Part and Mold Design GuideДокумент170 страницPart and Mold Design GuideminhtintinОценок пока нет
- Recruitment RulesДокумент5 страницRecruitment Rulesbiotech_vidhyaОценок пока нет
- 1 TolerancesДокумент1 страница1 Tolerancesbiotech_vidhyaОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- EcoEnergy Catalogue 081110Документ68 страницEcoEnergy Catalogue 081110Hummingbird HgcОценок пока нет
- DatasheetДокумент4 страницыDatasheetGrupo EpufmОценок пока нет
- Installation Guide TRx4-500Документ71 страницаInstallation Guide TRx4-500Dmitry UОценок пока нет
- Project Report (Vending Machine)Документ9 страницProject Report (Vending Machine)Muhammad HamzaОценок пока нет
- Gate Triggering Ckts Resistance TriggeringДокумент6 страницGate Triggering Ckts Resistance TriggeringAkhilrajscribdОценок пока нет
- KABINBURI (Feed Mil) Floater SLD - Rev 11Документ1 страницаKABINBURI (Feed Mil) Floater SLD - Rev 11Selvam KesavanОценок пока нет
- Wistron GodzillaДокумент61 страницаWistron Godzillarodrigootavio5Оценок пока нет
- Wein Bridge Oscillators PresentationДокумент15 страницWein Bridge Oscillators PresentationHarish KumarОценок пока нет
- KC str25 Paper17Документ2 страницыKC str25 Paper17Hàari CóolОценок пока нет
- Solar Led TVДокумент2 страницыSolar Led TVAnonymous I13s99Оценок пока нет
- Electricity System For HospitalsДокумент14 страницElectricity System For HospitalsTejinderОценок пока нет
- Wireless Technology (Slide)Документ17 страницWireless Technology (Slide)Shafiq Mohd NorОценок пока нет
- Chowdhury 2017Документ11 страницChowdhury 2017bhatttanmayhОценок пока нет
- DigiLink Technical Catalogue 2011Документ44 страницыDigiLink Technical Catalogue 2011Anonymous gMgeQl1SndОценок пока нет
- P 3 U 30Документ120 страницP 3 U 30ArcoolОценок пока нет
- JW 5880200 GДокумент18 страницJW 5880200 GMahmoudYasienMashhourОценок пока нет
- CIPS-14-010 Perforation Safety English VersionДокумент18 страницCIPS-14-010 Perforation Safety English VersionecarcovaОценок пока нет
- Experiment 5 Eng NaderДокумент7 страницExperiment 5 Eng Naderياسر العويطيОценок пока нет
- Laser Light Cable (LLK-B) Spare Parts CatalogДокумент6 страницLaser Light Cable (LLK-B) Spare Parts CatalogBuentello B GonzalezОценок пока нет
- Example Pump Selection: Equipment Data SheetДокумент4 страницыExample Pump Selection: Equipment Data SheetMohamed Yassine LahianiОценок пока нет
- Nishikant Power System Internship Report Docs 1Документ23 страницыNishikant Power System Internship Report Docs 1Darshan PawarОценок пока нет
- September 04 2022 NEET UG Re Exam Combined Solution Code W6 1Документ46 страницSeptember 04 2022 NEET UG Re Exam Combined Solution Code W6 1Bishal ChowdhuryОценок пока нет
- Lecture Notes 17 - Electrical Safety of Medical EquipmentДокумент4 страницыLecture Notes 17 - Electrical Safety of Medical Equipmentnramanathan1Оценок пока нет
- 1 Component Surface Mount Technology (SMT) : Intel® Manufacturing Enabling Guide May 2010Документ23 страницы1 Component Surface Mount Technology (SMT) : Intel® Manufacturing Enabling Guide May 2010Marco TassiОценок пока нет
- 25-Tap Differentiator Using Rectangular, Bartlett and Hamming Window EX - NO: DateДокумент6 страниц25-Tap Differentiator Using Rectangular, Bartlett and Hamming Window EX - NO: DateSaresh KumarОценок пока нет
- DATA LOGGER Trouble ShootingДокумент74 страницыDATA LOGGER Trouble ShootingGhyliving GhyОценок пока нет
- I O Summary For BMSДокумент2 страницыI O Summary For BMSN Faathimaa Shabrina67% (3)
- Huawei GSM Bts3900 Hardware Structure-20080728-Issue4.0Документ64 страницыHuawei GSM Bts3900 Hardware Structure-20080728-Issue4.0Agung WibawaОценок пока нет
- Multi-Parameter Monitoring & Controlling For A Boiler Using PIC ControllerДокумент1 страницаMulti-Parameter Monitoring & Controlling For A Boiler Using PIC ControllerkmkesavanОценок пока нет
- Re NR 67370001Документ7 страницRe NR 67370001Mauro PerezОценок пока нет