Вам также может понравиться
- para El Literal 2 Obtenga en El M A T L A B, Los Diagramas de Bode, Nyquist yДокумент17 страницpara El Literal 2 Obtenga en El M A T L A B, Los Diagramas de Bode, Nyquist yDiego XavierОценок пока нет
- AMME3500/9501 System Dynamics and Control Problem Set 11Документ3 страницыAMME3500/9501 System Dynamics and Control Problem Set 11Quazar001Оценок пока нет
- CDS 101, Lecture 8.1 R. M. Murray, CaltechДокумент7 страницCDS 101, Lecture 8.1 R. M. Murray, CaltechPhisathoОценок пока нет
- Mohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal ReportДокумент8 страницMohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal Reportta_daa_89Оценок пока нет
- MIT16 30F10 Lec04Документ16 страницMIT16 30F10 Lec04Cristian NapoleОценок пока нет
- BodeДокумент17 страницBodeahmed s. NourОценок пока нет
- 07 StabilityДокумент10 страниц07 StabilitymdessoukyОценок пока нет
- Lecture 14Документ35 страницLecture 14AhsabОценок пока нет
- WK 12 FR Bode Plot Nyquist May 11,2015Документ104 страницыWK 12 FR Bode Plot Nyquist May 11,2015biruk1Оценок пока нет
- Module 5: Design of Sampled Data Control Systems: Lecture Note 8Документ8 страницModule 5: Design of Sampled Data Control Systems: Lecture Note 8Aryan RajОценок пока нет
- Opamp (Ota) Design: The Design Process Involves Two Distinct Activities: - Architecture DesignДокумент87 страницOpamp (Ota) Design: The Design Process Involves Two Distinct Activities: - Architecture DesignKumar GaneshОценок пока нет
- Module 2 - 2Документ68 страницModule 2 - 2abcdОценок пока нет
- Frequency ResponseДокумент50 страницFrequency ResponseAli AhmadОценок пока нет
- 1st Order TorsДокумент3 страницы1st Order Torsspams20035571Оценок пока нет
- Lecture 20Документ37 страницLecture 20eng fourmОценок пока нет
- Phase Shifter TutorialДокумент12 страницPhase Shifter TutorialsukusportyОценок пока нет
- Design of Phase-Lead CompensatorДокумент13 страницDesign of Phase-Lead CompensatorAsif MudgalОценок пока нет
- CDS 101/110a: Lecture 9-1 PID Control: Richard M. Murray 24 November 2008Документ14 страницCDS 101/110a: Lecture 9-1 PID Control: Richard M. Murray 24 November 2008cooldoubtlessОценок пока нет
- SYSC 4405 - Quiz5b SolutionДокумент4 страницыSYSC 4405 - Quiz5b SolutionAleksandra DiotteОценок пока нет
- The Frecuency-Response Design Method: Universidad Politecnica SalesianaДокумент28 страницThe Frecuency-Response Design Method: Universidad Politecnica SalesianaFabiola ChachaОценок пока нет
- Microelectronic Circuits: Amplifier BasicsДокумент57 страницMicroelectronic Circuits: Amplifier BasicsAkshay AnandОценок пока нет
- Frequency Response DesignДокумент22 страницыFrequency Response Designمعروف المحجريОценок пока нет
- ELEC4410 Control System Design Revision NotesДокумент10 страницELEC4410 Control System Design Revision Notescjman404Оценок пока нет
- Solution To HW8Документ13 страницSolution To HW8TriinyRosseОценок пока нет
- Project Final - Pipelined CSMДокумент18 страницProject Final - Pipelined CSMbhargavОценок пока нет
- Lecture 8: From Analog To Digital Controllers, PID Control Design ApproachesДокумент10 страницLecture 8: From Analog To Digital Controllers, PID Control Design ApproachesarafatasgharОценок пока нет
- Geng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceДокумент9 страницGeng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceangelosoutiОценок пока нет
- Lecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveДокумент6 страницLecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveVan Nguyen Huu VanОценок пока нет
- GPRS EGPRSRNOptimisationWorkshop2Документ30 страницGPRS EGPRSRNOptimisationWorkshop2rncc2011Оценок пока нет
- Step Response For The Transfer Function of A Sensor PDFДокумент22 страницыStep Response For The Transfer Function of A Sensor PDFcesarinigillasОценок пока нет
- Bode PDFДокумент5 страницBode PDFLuisОценок пока нет
- Practical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitleДокумент20 страницPractical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitlealwaysharshОценок пока нет
- ID Código Referência Nome 950 2150Документ3 страницыID Código Referência Nome 950 2150Vitor CorreiaОценок пока нет
- Sound Quality Can Be Measured: ConverterДокумент2 страницыSound Quality Can Be Measured: ConverterEmi CabreraОценок пока нет
- 1 - Compensator Design Procedure - Lead - Lag - With ExamplesДокумент12 страниц1 - Compensator Design Procedure - Lead - Lag - With ExamplesMadhav SОценок пока нет
- Compensating Amplifiers That Are Stable at Gain To Operate at Lower GainsДокумент2 страницыCompensating Amplifiers That Are Stable at Gain To Operate at Lower GainsajpukОценок пока нет
- Math 5Документ37 страницMath 5Anonymous UrzdtCB0IОценок пока нет
- Ali Fahem - HW06 PDFДокумент10 страницAli Fahem - HW06 PDFAli FahemОценок пока нет
- Fahem - HW 06: Problem - 1-Solution: A) Transfer Frequency Function IsДокумент10 страницFahem - HW 06: Problem - 1-Solution: A) Transfer Frequency Function IsAli FahemОценок пока нет
- Homewrok #1 SolutionДокумент5 страницHomewrok #1 SolutionStoyan StoyanovОценок пока нет
- Sallen-Key Low Pass Filter Design Routine: R C R G VДокумент17 страницSallen-Key Low Pass Filter Design Routine: R C R G VMohamed MostafaОценок пока нет
- KashoocontrollДокумент5 страницKashoocontrollMuhammadwaqasnaseemОценок пока нет
- NyquistДокумент12 страницNyquistOsel Novandi WitohendroОценок пока нет
- ActivemicrowavereportДокумент13 страницActivemicrowavereportUğur Berkay ÇalışkanОценок пока нет
- Assignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Документ15 страницAssignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Shyam ShankarОценок пока нет
- 111 SampleДокумент21 страница111 SampleMadaka Siva kumarОценок пока нет
- Compensator Design II PDFДокумент37 страницCompensator Design II PDFMani Vannan SoundarapandiyanОценок пока нет
- Digital Audio EffectsДокумент111 страницDigital Audio EffectsshervinshОценок пока нет
- Lab Title: Objectives: Material Required:: Sinusoidal Steady StateДокумент11 страницLab Title: Objectives: Material Required:: Sinusoidal Steady Stateahmed shahОценок пока нет
- Bode Lesson1Документ32 страницыBode Lesson1Fairus AffiniОценок пока нет
- 0 From: in (1) From: in (2) : Bode DiagramДокумент9 страниц0 From: in (1) From: in (2) : Bode DiagramAbhijeet BhagavatulaОценок пока нет
- CH 14Документ108 страницCH 14SherifОценок пока нет
- Samson - Lab 8 PAUSДокумент4 страницыSamson - Lab 8 PAUSdenzordicОценок пока нет
- Modeling and Simulation of RLC Circuit (Band Pass Filter)Документ25 страницModeling and Simulation of RLC Circuit (Band Pass Filter)elneelОценок пока нет
- % G(S) 1/ts+1 NumДокумент16 страниц% G(S) 1/ts+1 NumJhoel Quispe TiconaОценок пока нет
- SolShortExam2 ODD (Impar Colum)Документ16 страницSolShortExam2 ODD (Impar Colum)Daniel AcostaОценок пока нет
- Control System Toolbox (Part-III) : 1 10/17/2018 Dept. of EEE, PUSTДокумент30 страницControl System Toolbox (Part-III) : 1 10/17/2018 Dept. of EEE, PUSTতানভীর আহমেদОценок пока нет
- 9 El-Khazali Lead Controller DesignДокумент39 страниц9 El-Khazali Lead Controller Designs.a.s1d3233Оценок пока нет
- Grid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsДокумент6 страницGrid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsJandfor Tansfg ErrottОценок пока нет
- Manual Aspire 5551Документ210 страницManual Aspire 5551Arnaud NetoОценок пока нет
- Textile AssignmentДокумент8 страницTextile AssignmentMahmudul Hasan Khan40% (5)
- EWF2703 TV EmersonДокумент57 страницEWF2703 TV EmersonEriksson Miguel Tapia SolisОценок пока нет
- Sensores AvДокумент12 страницSensores Avhb CorpОценок пока нет
- Liquid Gas Absorption ProcessДокумент89 страницLiquid Gas Absorption ProcessMohd Masri A. RazakОценок пока нет
- September 2015Документ2 страницыSeptember 2015Patriziah Marie SeldaОценок пока нет
- Watertight Doors On Ships: Types, Maintenance & SOLAS RegulationsДокумент16 страницWatertight Doors On Ships: Types, Maintenance & SOLAS Regulationsgeorgesaguna100% (1)
- Flabeg Solar enДокумент11 страницFlabeg Solar enZeec NoorОценок пока нет
- 11i APC Imp GuideДокумент108 страниц11i APC Imp GuidePrashanth ReddyОценок пока нет
- Sand Control PDFДокумент88 страницSand Control PDFThọ Phương100% (1)
- Drawing & Document List Cisanggiri 2 X 1.5 MWДокумент4 страницыDrawing & Document List Cisanggiri 2 X 1.5 MWZoebairОценок пока нет
- HEKO Products and Services: Elements For Bucket ElevatorsДокумент36 страницHEKO Products and Services: Elements For Bucket ElevatorsShariq KhanОценок пока нет
- Chrony Beta and GammaДокумент36 страницChrony Beta and GammaÁdám MajorОценок пока нет
- Pre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationДокумент3 страницыPre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationEugenio Jr. MatesОценок пока нет
- Pavement Evaluation and Overlay Des - DR MSA - LatestДокумент103 страницыPavement Evaluation and Overlay Des - DR MSA - LatestSreedhar BhuduruОценок пока нет
- No35-Inclined Roof SystemДокумент24 страницыNo35-Inclined Roof SystemKitanovic NenadОценок пока нет
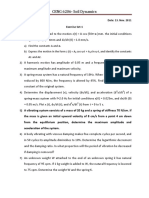
- CENG6206 Soil Dynamics ExerciseProblemДокумент4 страницыCENG6206 Soil Dynamics ExerciseProblemFekadu Wub100% (1)
- Supercontryx®: Innovative Glass For X - Ray ProtectionДокумент2 страницыSupercontryx®: Innovative Glass For X - Ray ProtectionUsman AhmedОценок пока нет
- GAMS TutorialДокумент28 страницGAMS TutorialWendy Tie Kai SingОценок пока нет
- OK Flux 231 (F7AZ-EL12) PDFДокумент2 страницыOK Flux 231 (F7AZ-EL12) PDFborovniskiОценок пока нет
- Smart Obj. Kiss and SwotДокумент5 страницSmart Obj. Kiss and SwotjtopuОценок пока нет
- BX-74 / BX-78: Sliding Gate Operator BX SeriesДокумент24 страницыBX-74 / BX-78: Sliding Gate Operator BX SeriesStefce PetrovОценок пока нет
- ASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Документ3 страницыASTM D287-92 (Metodo de Prueba Estandar para Gravedad API de Petroleo Crudo y Productos Del Petroleo Metodo Del Hidrómetro)Juan MonjeОценок пока нет
- A Research Paper On Design and Analysis of Shaftless Steam TurbineДокумент5 страницA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDОценок пока нет
- DUNAN Fan Coil UnitДокумент14 страницDUNAN Fan Coil UnitDjordjeОценок пока нет
- Stelzer Catalog PDFДокумент12 страницStelzer Catalog PDFlhphong021191Оценок пока нет
- Chemical Induetries-1Документ75 страницChemical Induetries-1Muhammad Anees Ur RehmanОценок пока нет
- DNF Stand PipeДокумент3 страницыDNF Stand PipeChristopher BrownОценок пока нет
- 592-A2GA DesbloqueadoДокумент27 страниц592-A2GA DesbloqueadoVicktor GranadosОценок пока нет