Вам также может понравиться
- Movimiento de RototraslacionДокумент6 страницMovimiento de RototraslacionFranciscoОценок пока нет
- Practicas 2Документ2 страницыPracticas 2xodriОценок пока нет
- Repaso Grafico LGR y Sistemas de Fase No MinimaДокумент35 страницRepaso Grafico LGR y Sistemas de Fase No MinimaJUAN REYES TRONCOSOОценок пока нет
- Ingeniería de Control: Tema 1b. Análisis de La Respuesta en FrecuenciaДокумент117 страницIngeniería de Control: Tema 1b. Análisis de La Respuesta en Frecuenciasantiago pablo alberto100% (1)
- Control Digital Taller 1Документ3 страницыControl Digital Taller 1Omar David Peña IbarraОценок пока нет
- Ejercicios ResueltosДокумент17 страницEjercicios ResueltosAna Luisa Garnica Salgado100% (1)
- Lab 02 Transformada Z InversaДокумент3 страницыLab 02 Transformada Z InversaJavier EsquivelОценок пока нет
- Analisis de Circuitos Con ORCADДокумент16 страницAnalisis de Circuitos Con ORCADJose Manuel Luna100% (1)
- Algebra de Bloques.Документ6 страницAlgebra de Bloques.Anonymous c7Ujihhk100% (1)
- Subistemas de Un Robot y ClasificacionesДокумент25 страницSubistemas de Un Robot y ClasificacionesbErnArd fELizОценок пока нет
- Analisis de Respuesta Transitoria PDFДокумент10 страницAnalisis de Respuesta Transitoria PDFJuan Castillo TavaraОценок пока нет
- Practica 7 ControlДокумент18 страницPractica 7 ControlDaniel Loaiza LópezОценок пока нет
- Preguntas Sobre Galgas ExtensiométricasДокумент1 страницаPreguntas Sobre Galgas ExtensiométricasAndresОценок пока нет
- Practica 4 ContadoresДокумент11 страницPractica 4 ContadoresMario CernaОценок пока нет
- Introduccion Al Sistema de Control 2Документ6 страницIntroduccion Al Sistema de Control 2Miguel RoblesОценок пока нет
- Guia de Ejercicios 6 - LGR - Ing. SalazarДокумент4 страницыGuia de Ejercicios 6 - LGR - Ing. Salazaredgar cardenasОценок пока нет
- Codificador de Teclado MatricialДокумент2 страницыCodificador de Teclado MatricialAlan Vidal CAsillas0% (1)
- Termopar Tipo KДокумент7 страницTermopar Tipo KAnonymous IoreTDh7Оценок пока нет
- Practica 7Документ6 страницPractica 7pa0l0Оценок пока нет
- Rep 3Документ5 страницRep 3Jorge Eduardo Suarez GallardoОценок пока нет
- Ejemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansДокумент42 страницыEjemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansBrayan100% (1)
- Practica 2 Lab de Instrumentacion y ControlДокумент13 страницPractica 2 Lab de Instrumentacion y ControlDavid RodriguezОценок пока нет
- Practica 1 Circuitos DigitalesДокумент9 страницPractica 1 Circuitos DigitalesAndyfer07Оценок пока нет
- Sistemas de Datos MuestreadosДокумент6 страницSistemas de Datos MuestreadosJosé Roberto MárquezОценок пока нет
- Examen 2Документ9 страницExamen 2Irvin Anibal Cruz HernandezОценок пока нет
- Keypad PythonДокумент3 страницыKeypad PythonJuan David SolarteОценок пока нет
- Modelado de Sistemas Mecanicos IIДокумент7 страницModelado de Sistemas Mecanicos IIlewys rinconОценок пока нет
- Simulacion Analogica y Digital de Sistemas MecánicosДокумент8 страницSimulacion Analogica y Digital de Sistemas MecánicosSergio VeraОценок пока нет
- Prac 27Документ7 страницPrac 27Yall GlezОценок пока нет
- Lab. Control y Automatización 06 - 2020Документ9 страницLab. Control y Automatización 06 - 2020123456579Оценок пока нет
- Laboratorio #04 Sist 2do OrdenДокумент7 страницLaboratorio #04 Sist 2do OrdenJosue Israel MendozaОценок пока нет
- Trabajo Bloque 1Документ15 страницTrabajo Bloque 1jake kawaiiОценок пока нет
- Examen LogicaДокумент2 страницыExamen LogicaMariaОценок пока нет
- Copia de Formato - Automatismos - Combinacionales 3 y 7Документ15 страницCopia de Formato - Automatismos - Combinacionales 3 y 7Deiby FernandoОценок пока нет
- Temario Fundamentos AudioДокумент2 страницыTemario Fundamentos Audioronans69Оценок пока нет
- T6 - Modelo Matematico Robot 3 GradosДокумент3 страницыT6 - Modelo Matematico Robot 3 GradosSalvador OlmosОценок пока нет
- Lab1 (My Openlab)Документ5 страницLab1 (My Openlab)Gerald AburtoОценок пока нет
- Control de LuminosidadДокумент3 страницыControl de LuminosidadAlex GoreОценок пока нет
- Practica 1Документ3 страницыPractica 1Alfredo ReyesОценок пока нет
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsДокумент20 страницLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioОценок пока нет
- Amplificador Con TIP 31 y TIP 32Документ2 страницыAmplificador Con TIP 31 y TIP 32Adan Marrero RodriguezОценок пока нет
- Guia-2 GUIA USO MATLAB A CONTROL PDFДокумент17 страницGuia-2 GUIA USO MATLAB A CONTROL PDFMamani D FloresОценок пока нет
- Taller 1-2. Electronica DigitalДокумент1 страницаTaller 1-2. Electronica DigitalRAY STEVENSON AMAYA MALDONADOОценок пока нет
- ADC Flash o Paralelo LabДокумент2 страницыADC Flash o Paralelo LabrcarlospjОценок пока нет
- Banderas AVR MicrocontroladorДокумент3 страницыBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- Ejercicios de Impulsos, Rampas y Escalares de SeñalesДокумент4 страницыEjercicios de Impulsos, Rampas y Escalares de SeñalesAntonioОценок пока нет
- Análisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoДокумент4 страницыAnálisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoLuilli Angel EsquincaОценок пока нет
- Examen DSP-E152-2-1-20Документ1 страницаExamen DSP-E152-2-1-20dileconОценок пока нет
- Comunicacion Serial SincronaДокумент24 страницыComunicacion Serial Sincronaandres8179Оценок пока нет
- Estabilidad en Sistemas de ControlДокумент17 страницEstabilidad en Sistemas de ControlsthefanyОценок пока нет
- Respuesta A Una Señal Escalón de Una Planta Simulada Con Proteus Design SuitДокумент7 страницRespuesta A Una Señal Escalón de Una Planta Simulada Con Proteus Design SuitLuz Elena M. PossoОценок пока нет
- Sistemas en Tiempo ContinuoДокумент34 страницыSistemas en Tiempo ContinuoEl CanoeroОценок пока нет
- Respuesta A La Función Escalón en Un Circuito R-L-C ParaleloДокумент8 страницRespuesta A La Función Escalón en Un Circuito R-L-C ParaleloAbel Menendez RamosОценок пока нет
- Laboratorio N°8 SC2Документ4 страницыLaboratorio N°8 SC2Brayan VQ100% (1)
- Contador de 0-99 Con AlarmaДокумент3 страницыContador de 0-99 Con AlarmaMarvin GarcíaОценок пока нет
- 2.5 2.6 2.7 EstabilidadДокумент17 страниц2.5 2.6 2.7 EstabilidadJairo Manríquez EspinozaОценок пока нет
- Criterios de RUTH - HURWITZ para Estabilidad de Un SistemaДокумент5 страницCriterios de RUTH - HURWITZ para Estabilidad de Un SistemaeverОценок пока нет
- EstabilidadДокумент3 страницыEstabilidadLeslye ValenzuelaОценок пока нет
- 2.5 Criterio de Estabilidad De: ROUT-HURWIT: Ecuación 2.5.1Документ9 страниц2.5 Criterio de Estabilidad De: ROUT-HURWIT: Ecuación 2.5.1López SantiagoОценок пока нет
- Criterio de Routh HДокумент6 страницCriterio de Routh HJosé HernándezОценок пока нет
- Manual IdentificaciónДокумент18 страницManual IdentificaciónChristian Josef Ugarte GaliciaОценок пока нет
- Control Moderno y Óptimo Semana 1Документ38 страницControl Moderno y Óptimo Semana 1Christian Josef Ugarte GaliciaОценок пока нет
- Inicios de La Electricidad en El PerúДокумент4 страницыInicios de La Electricidad en El PerúChristian Josef Ugarte Galicia0% (1)
- Formulacion DinamicaДокумент7 страницFormulacion DinamicaChristian Josef Ugarte GaliciaОценок пока нет
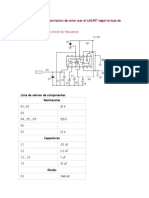
- lm2907 2Документ4 страницыlm2907 2Christian Josef Ugarte GaliciaОценок пока нет
- Sistema MulticuerposДокумент34 страницыSistema MulticuerposChristian Josef Ugarte GaliciaОценок пока нет
- Fuente Con LM317 Con Transistor Amplificador de CorrienteДокумент1 страницаFuente Con LM317 Con Transistor Amplificador de CorrienteChristian Josef Ugarte GaliciaОценок пока нет
- Intercomunicador El Amplificador de Audio LM380Документ1 страницаIntercomunicador El Amplificador de Audio LM380Christian Josef Ugarte GaliciaОценок пока нет
- Hardware Interno y ExternoДокумент13 страницHardware Interno y ExternoOmar SanchezОценок пока нет
- Tarea 2Документ3 страницыTarea 2Nikolass SäntosОценок пока нет
- La Fiabilidad de Los Sistemas de Telecomunicación. 2008Документ17 страницLa Fiabilidad de Los Sistemas de Telecomunicación. 2008Gerda WarnholtzОценок пока нет
- Aportes de La Informatica A La AdministracionДокумент16 страницAportes de La Informatica A La AdministracionMaria MarcucciОценок пока нет
- Constancia ArrimeДокумент6 страницConstancia ArrimeJhoanna MartinezОценок пока нет
- Versiones de Windows 7Документ8 страницVersiones de Windows 7Maria FernandaОценок пока нет
- Tutorial de Desarrollo Web Con ASPДокумент60 страницTutorial de Desarrollo Web Con ASPLuis GarciaОценок пока нет
- Unidad 4 Microcontrolador Parte 1Документ34 страницыUnidad 4 Microcontrolador Parte 1Karen CaamañoОценок пока нет
- Ur10 User Manual Es PDFДокумент185 страницUr10 User Manual Es PDFDaniel PérezОценок пока нет
- Que Es Una WikiДокумент5 страницQue Es Una Wikijulisa barriosОценок пока нет
- Procedimiento de Entrega Documentos y FacturasДокумент3 страницыProcedimiento de Entrega Documentos y Facturasjonathan0% (1)
- Navegadores y BuscadoresДокумент11 страницNavegadores y BuscadoresAngel Zapata FuentesОценок пока нет
- Evaluación Técnica Del Pavimento y Comparación de Métodos de Diseño de Capas de Refuerzo Asfáltico Por Guillermo Thenoux ZДокумент1 страницаEvaluación Técnica Del Pavimento y Comparación de Métodos de Diseño de Capas de Refuerzo Asfáltico Por Guillermo Thenoux ZedwinОценок пока нет
- Business Model CanvasДокумент1 страницаBusiness Model CanvasOscar Escandon Ruiz100% (1)
- Instituto Tecnológico de Aguascalientes Proyecto SimulacionДокумент12 страницInstituto Tecnológico de Aguascalientes Proyecto SimulacionKaren Pérez OlveraОценок пока нет
- Interaccion Hombre Con Equipo o Vehiculo MovilДокумент1 страницаInteraccion Hombre Con Equipo o Vehiculo MovilEduardo Cristian Campos PuchowskyОценок пока нет
- Trabajo Original de MicrosoftДокумент82 страницыTrabajo Original de MicrosoftmrgianeeОценок пока нет
- Bootstrap Date PaginatorДокумент9 страницBootstrap Date PaginatorOsmel Calderon BernalОценок пока нет
- Solucionario 2015 170330183319Документ204 страницыSolucionario 2015 170330183319daviesronald26Оценок пока нет
- Modelo de Inventario Caja OriginalДокумент79 страницModelo de Inventario Caja Originalnair carmenОценок пока нет
- F 4126 SitmahДокумент1 страницаF 4126 SitmahRichard Gasper EscamillaОценок пока нет
- Formato SK LV CON 009 R01 Reunion Inicio Soldadura ECO Sup Rev.1Документ2 страницыFormato SK LV CON 009 R01 Reunion Inicio Soldadura ECO Sup Rev.1gtvoОценок пока нет
- Arreglos y Cadenas en CДокумент15 страницArreglos y Cadenas en Cjohn kenneth vasquez vasquezОценок пока нет
- Brochure Simatic-Step7 Tia-Portal EsДокумент24 страницыBrochure Simatic-Step7 Tia-Portal EsraiОценок пока нет
- InformaticaДокумент306 страницInformaticaCesar Guiseppe Carrion BeldiОценок пока нет
- BDA 5 Bases de Datos DistribuidasДокумент9 страницBDA 5 Bases de Datos DistribuidasGonzaloGcpОценок пока нет
- AlgebraДокумент6 страницAlgebraWilder Huaman Muñoz100% (1)
- MaquinaДокумент3 страницыMaquinaangieОценок пока нет
- Tarjeta de PagoДокумент7 страницTarjeta de PagoAnaEstherGomezYanapaОценок пока нет
- Matriz de Doble EntradaДокумент4 страницыMatriz de Doble EntradaMARIA CAMILA ARBELAEZ OSORIOОценок пока нет
- University of Chicago Press Fall 2009 Distributed TitlesОт EverandUniversity of Chicago Press Fall 2009 Distributed TitlesРейтинг: 1 из 5 звезд1/5 (1)