Вам также может понравиться
- Application of Optimization Techniques in Metal Forging A Review and ReflectionДокумент6 страницApplication of Optimization Techniques in Metal Forging A Review and Reflections_ahuja123Оценок пока нет
- Hot DieДокумент4 страницыHot Dies_ahuja123Оценок пока нет
- Im3215181522 PDFДокумент5 страницIm3215181522 PDFs_ahuja123Оценок пока нет
- Tool and Die IndustryДокумент20 страницTool and Die IndustryMostafa Abd El AlemОценок пока нет
- Crankshaft NotesДокумент68 страницCrankshaft Notestharad67% (3)
- CrankshaftДокумент3 страницыCrankshaftAnirudhreddy SafalОценок пока нет
- Shape Memory Effect-Phenomenon, Alloys and ApplicationsДокумент14 страницShape Memory Effect-Phenomenon, Alloys and Applicationss_ahuja123Оценок пока нет
- 12 - Fatigue of MetalsДокумент55 страниц12 - Fatigue of Metalsvoldemorts100% (1)
- Bench Grinder FINAL OKДокумент2 страницыBench Grinder FINAL OKs_ahuja123Оценок пока нет
- Crystal ImperfectionsДокумент44 страницыCrystal Imperfectionss_ahuja123Оценок пока нет
- Teachers GuideДокумент64 страницыTeachers Guides_ahuja123Оценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Experion Legacy IO Link Module Parameter Reference Dictionary LIOM-300Документ404 страницыExperion Legacy IO Link Module Parameter Reference Dictionary LIOM-300BouazzaОценок пока нет
- Sai Deepa Rock Drills: Unless Otherwise Specified ToleranceДокумент1 страницаSai Deepa Rock Drills: Unless Otherwise Specified ToleranceRavi BabaladiОценок пока нет
- Form No. 1 Gangtok Municipal Corporation Deorali, SikkimДокумент2 страницыForm No. 1 Gangtok Municipal Corporation Deorali, SikkimMUSKAANОценок пока нет
- Introduction To The Iceberg ModelДокумент5 страницIntroduction To The Iceberg ModelAbhay Tiwari100% (1)
- Gastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterДокумент9 страницGastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterPier Pasquale TrausiОценок пока нет
- Hayek - Planning, Science, and Freedom (1941)Документ5 страницHayek - Planning, Science, and Freedom (1941)Robert Wenzel100% (1)
- Case Paul Foster Highlights of TarotДокумент76 страницCase Paul Foster Highlights of TarotTraditionaltarot100% (6)
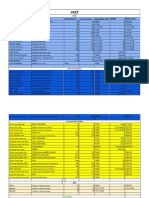
- Jazz PrepaidДокумент4 страницыJazz PrepaidHoney BunnyОценок пока нет
- BS 07533-3-1997Документ21 страницаBS 07533-3-1997Ali RayyaОценок пока нет
- Thesis StoryboardДокумент5 страницThesis StoryboardJill Brown100% (2)
- Concrete Lab ManualДокумент20 страницConcrete Lab ManualkelmazodroОценок пока нет
- Tensile Strength of Ferro Cement With Respect To Specific SurfaceДокумент3 страницыTensile Strength of Ferro Cement With Respect To Specific SurfaceheminОценок пока нет
- The Theory of Production and Cost: Chapter FourДокумент32 страницыThe Theory of Production and Cost: Chapter FourOromay Elias100% (1)
- 【SIEMENS】Cios Spin-FlyerДокумент8 страниц【SIEMENS】Cios Spin-FlyerAshleyОценок пока нет
- Slipform Construction TechniqueДокумент6 страницSlipform Construction TechniqueDivyansh NandwaniОценок пока нет
- ECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooДокумент3 страницыECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooTarun SharmaОценок пока нет
- Module 2 DIPДокумент33 страницыModule 2 DIPdigital loveОценок пока нет
- Watershed Conservation of Benguet VisДокумент2 страницыWatershed Conservation of Benguet VisInnah Agito-RamosОценок пока нет
- Soil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqДокумент7 страницSoil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqPicasso DebnathОценок пока нет
- GARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergДокумент42 страницыGARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergRanjan KumarОценок пока нет
- Integration Plan Grade 9 Mapeh SeptemberДокумент3 страницыIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaОценок пока нет
- AT ChapIДокумент48 страницAT ChapIvigneshwaranbeОценок пока нет
- Overview of MEMДокумент5 страницOverview of MEMTudor Costin100% (1)
- TIB Bwpluginrestjson 2.1.0 ReadmeДокумент2 страницыTIB Bwpluginrestjson 2.1.0 ReadmemarcmariehenriОценок пока нет
- Power - Factor - Correction - LegrandДокумент24 страницыPower - Factor - Correction - LegrandrehanОценок пока нет
- An Overview and Framework For PD Backtesting and BenchmarkingДокумент16 страницAn Overview and Framework For PD Backtesting and BenchmarkingCISSE SerigneОценок пока нет
- Vectors Notes (Answers)Документ24 страницыVectors Notes (Answers)ScionОценок пока нет
- ITP - Plaster WorkДокумент1 страницаITP - Plaster Workmahmoud ghanemОценок пока нет
- SL 4001Документ2 страницыSL 4001ardiОценок пока нет
- Risk Assessment For Harmonic Measurement Study ProcedureДокумент13 страницRisk Assessment For Harmonic Measurement Study ProcedureAnandu AshokanОценок пока нет