Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- PS-1223 Technical Specifications - USДокумент2 страницыPS-1223 Technical Specifications - USkwesiwellsОценок пока нет
- Sewage Plant ManualДокумент79 страницSewage Plant Manualankurkatiyar100% (6)
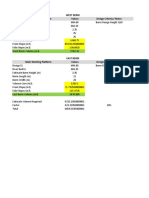
- West Berm Main Working Platform Values Design Criteria / NotesДокумент2 страницыWest Berm Main Working Platform Values Design Criteria / NoteskwesiwellsОценок пока нет
- Plant Mechanics LTD (Compressed)Документ15 страницPlant Mechanics LTD (Compressed)kwesiwellsОценок пока нет
- Biggest Construction Companies in BCДокумент1 страницаBiggest Construction Companies in BCkwesiwellsОценок пока нет
- 1TZ9 IE3 Lonne Motors Rev2 2015Документ8 страниц1TZ9 IE3 Lonne Motors Rev2 2015salim rahmanОценок пока нет
- Session 06Документ34 страницыSession 06kwesiwellsОценок пока нет
- SS Highway - 211 Portland ConcreteДокумент36 страницSS Highway - 211 Portland ConcretekwesiwellsОценок пока нет
- Cost Comparison Sheet - Armstrong Parts - MOE RebuildДокумент4 страницыCost Comparison Sheet - Armstrong Parts - MOE RebuildkwesiwellsОценок пока нет
- Camp Days Summary - 30th November 2015Документ1 страницаCamp Days Summary - 30th November 2015kwesiwellsОценок пока нет
- Parsnip River Bridge Deck Trial Mix MatrixДокумент1 страницаParsnip River Bridge Deck Trial Mix MatrixkwesiwellsОценок пока нет
- Armstrong IH 051-19 Plant Mechanics SignedДокумент3 страницыArmstrong IH 051-19 Plant Mechanics SignedkwesiwellsОценок пока нет
- Plant Mechanics Limited: Balance SheetДокумент2 страницыPlant Mechanics Limited: Balance SheetkwesiwellsОценок пока нет
- ARAgeingSummary - 24th Oct 2018Документ1 страницаARAgeingSummary - 24th Oct 2018kwesiwellsОценок пока нет
- W-8ben For CDN Beachbody Coaches SampleДокумент1 страницаW-8ben For CDN Beachbody Coaches Sampleapi-295933330Оценок пока нет
- ITR-315 - Evironmental Site Audit ChecklistДокумент1 страницаITR-315 - Evironmental Site Audit ChecklistkwesiwellsОценок пока нет
- ProfitandLoss - PDF - 24th Oct 2018Документ1 страницаProfitandLoss - PDF - 24th Oct 2018kwesiwellsОценок пока нет
- Motors Protected With AEGIS® Shaft Grounding RingsДокумент1 страницаMotors Protected With AEGIS® Shaft Grounding RingskwesiwellsОценок пока нет
- CIPP DesignДокумент6 страницCIPP DesignkwesiwellsОценок пока нет
- 46 10 HSC Brochure - PDF - Marked UpДокумент4 страницы46 10 HSC Brochure - PDF - Marked UpkwesiwellsОценок пока нет
- Assignment #1 - Project Delivery MethodsДокумент1 страницаAssignment #1 - Project Delivery MethodskwesiwellsОценок пока нет
- Assignment # 9Документ3 страницыAssignment # 9kwesiwellsОценок пока нет
- HHD Design Project - XLSX - CapstoneДокумент18 страницHHD Design Project - XLSX - CapstonekwesiwellsОценок пока нет
- HHD Design Project - XLSX - CapstoneДокумент18 страницHHD Design Project - XLSX - CapstonekwesiwellsОценок пока нет
- Supreme Court of Canada R. (Ont.) v. Ron Engineering, (1981) 1 S.C.R. 111 Date: 1981-01-27Документ14 страницSupreme Court of Canada R. (Ont.) v. Ron Engineering, (1981) 1 S.C.R. 111 Date: 1981-01-27kwesiwellsОценок пока нет
- HHD Design ProjectДокумент21 страницаHHD Design ProjectkwesiwellsОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- #Dr. Lora Ecg PDFДокумент53 страницы#Dr. Lora Ecg PDFمحمد زينОценок пока нет
- Easergy PS100 48VDC Power SupplyДокумент2 страницыEasergy PS100 48VDC Power SupplyRichard SyОценок пока нет
- L2 Biostatistics ProbabilityДокумент84 страницыL2 Biostatistics ProbabilityAaron CiudadОценок пока нет
- Approved Project 25 StandardsДокумент5 страницApproved Project 25 StandardsepidavriosОценок пока нет
- Arts6,4, Week2, Module 2V4Документ24 страницыArts6,4, Week2, Module 2V4Loreen Pearl MarlaОценок пока нет
- Tran-Effects of Assisted JumpingДокумент5 страницTran-Effects of Assisted JumpingyoungjessОценок пока нет
- Government of West Bengal:: Tata Motors LTD: Abc 1 1 1 1 NA 0 NA 0Документ1 страницаGovernment of West Bengal:: Tata Motors LTD: Abc 1 1 1 1 NA 0 NA 0md taj khanОценок пока нет
- Basses: Pricelist March 2019Документ3 страницыBasses: Pricelist March 2019zhaihaijunОценок пока нет
- Single Door Feeder Pillar 200A MCCBДокумент1 страницаSingle Door Feeder Pillar 200A MCCBMiqdad AliОценок пока нет
- Mathematical Modeling of Mechanical Systems and Electrical SystemsДокумент49 страницMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamОценок пока нет
- Orofacial Complex: Form and FunctionДокумент34 страницыOrofacial Complex: Form and FunctionAyushi Goel100% (1)
- Me8072 Renewable Sources of EnergyДокумент13 страницMe8072 Renewable Sources of EnergyNallappan Rajj AОценок пока нет
- Of The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestДокумент4 страницыOf The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestBaydaa QaidyОценок пока нет
- Manufacuring EngineeringДокумент3 страницыManufacuring Engineeringapi-79207659Оценок пока нет
- Chemical Bonds WorksheetДокумент2 страницыChemical Bonds WorksheetJewel Mae MercadoОценок пока нет
- Psychology 114: Chapters 3 & 4Документ18 страницPsychology 114: Chapters 3 & 4Grace AndersonОценок пока нет
- ST 36Документ4 страницыST 36ray72roОценок пока нет
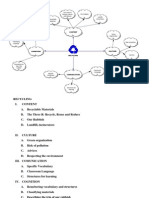
- Recycling Mind MapДокумент2 страницыRecycling Mind Mapmsole124100% (1)
- John Sisler CISSP Study GuideДокумент126 страницJohn Sisler CISSP Study GuideAnthonyОценок пока нет
- Course Structure and Content For Mechatronics, Systems and CДокумент32 страницыCourse Structure and Content For Mechatronics, Systems and CAnimonga HajimeОценок пока нет
- CAC Bubble DiagramsДокумент12 страницCAC Bubble Diagramsangst6250Оценок пока нет
- Ni Elvis ManualДокумент98 страницNi Elvis ManualZhi YiОценок пока нет
- Class 12 - Maths - MatricesДокумент87 страницClass 12 - Maths - MatricesAishwarya MishraОценок пока нет
- Sketchup-Rhino Cheat SheetДокумент1 страницаSketchup-Rhino Cheat Sheetxanext7Оценок пока нет
- MioPocket ReadmeДокумент30 страницMioPocket Readmelion78Оценок пока нет
- Cac de Luyen ThiДокумент18 страницCac de Luyen ThiVinh Dao CongОценок пока нет
- Donna Hay Magazine 2014-10-11 PDFДокумент172 страницыDonna Hay Magazine 2014-10-11 PDFlekovic_tanjaОценок пока нет
- Resumen C37 010 Aplicacion de Breaker Disenados IC Simetrica PDFДокумент9 страницResumen C37 010 Aplicacion de Breaker Disenados IC Simetrica PDFglendathais100% (1)
- Table 1 Minimum Separation DistancesДокумент123 страницыTable 1 Minimum Separation DistancesjhonОценок пока нет
- RMHE08Документ2 112 страницRMHE08Elizde GómezОценок пока нет