Вам также может понравиться
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- Study, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofДокумент10 страницStudy, Analysis and Evaluation of Block Diagram Reduction Name: University of Polytechnic/college ofTana AzeezОценок пока нет
- Block Diagrams - Lecture NotesДокумент8 страницBlock Diagrams - Lecture NotesMichael HsiaoОценок пока нет
- Control SystemsДокумент32 страницыControl Systemsselvi0412100% (1)
- Chapter 10Документ93 страницыChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- Zahra AbdulHameed ShukrДокумент11 страницZahra AbdulHameed ShukrTana AzeezОценок пока нет
- Block DiagramДокумент20 страницBlock DiagramabcdeОценок пока нет
- Block Diagram Representation2Документ74 страницыBlock Diagram Representation2Chernet TugeОценок пока нет
- Transfer Functions Block Diagrams Signal Flow Graph Mason's Gain FormulaДокумент28 страницTransfer Functions Block Diagrams Signal Flow Graph Mason's Gain FormulaMesut OzilОценок пока нет
- Analogy RLC en Mass Spring Dash PotДокумент26 страницAnalogy RLC en Mass Spring Dash Potjef_aernoutsОценок пока нет
- Slide 2Документ89 страницSlide 2EnesVSОценок пока нет
- BlockDiagram and Signal Flow GraphsДокумент29 страницBlockDiagram and Signal Flow GraphsDienies TorresОценок пока нет
- Chapter 4 Block Diagrams of Control SystemsДокумент18 страницChapter 4 Block Diagrams of Control SystemsZeynal Abidin ŞabaşОценок пока нет
- Slides 3: Reduction of Multiple SystemsДокумент25 страницSlides 3: Reduction of Multiple SystemsAhmad AbunassarОценок пока нет
- Chapter5-Reduction of SystemsДокумент33 страницыChapter5-Reduction of Systemsعمر الفهدОценок пока нет
- Control System LP 3Документ13 страницControl System LP 3Neans PlanterasОценок пока нет
- Lec 45Документ73 страницыLec 45api-247714257Оценок пока нет
- Block DiagramДокумент7 страницBlock DiagramShibin MathewОценок пока нет
- Lecture 2Документ14 страницLecture 2Abdullah Mohammed AlsaadouniОценок пока нет
- Ee 469Документ39 страницEe 469arwa zeglamОценок пока нет
- EE582 Control Techniques Laboratory Report Jeswin Mathew 200901475Документ11 страницEE582 Control Techniques Laboratory Report Jeswin Mathew 200901475Jeswin MathewОценок пока нет
- Book Coverage: 5.1 - 5.2 HW: Problems: 5.4, 5.7, and 5.10Документ7 страницBook Coverage: 5.1 - 5.2 HW: Problems: 5.4, 5.7, and 5.10Westley GomezОценок пока нет
- Tutorial 3Документ4 страницыTutorial 3Sam StideОценок пока нет
- Chapter 2 Mathematical Modeling of Dynamic SystemДокумент56 страницChapter 2 Mathematical Modeling of Dynamic SystemAmanuel AsfawОценок пока нет
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemДокумент21 страницаB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Control SystemsДокумент8 страницControl Systemsmohammed zaidОценок пока нет
- Transfer Functions From Block Diagrams and Signal Flow ChartДокумент10 страницTransfer Functions From Block Diagrams and Signal Flow ChartYzza Veah EsquivelОценок пока нет
- Chapter 2 - Mathematical Modeling - 2Документ15 страницChapter 2 - Mathematical Modeling - 2Qadeer AhmedОценок пока нет
- Controls Finals ResearchДокумент15 страницControls Finals ResearchRenz Xynor Liotib CadizОценок пока нет
- skemaSEE4113sem20809correction 1Документ25 страницskemaSEE4113sem20809correction 1239191Оценок пока нет
- Transfer Function and Block Diagram of Control System Transfer FunctionДокумент8 страницTransfer Function and Block Diagram of Control System Transfer Functionabbasmiry83Оценок пока нет
- Modern Control SystemДокумент72 страницыModern Control SystemBewnet GetachewОценок пока нет
- Designing A Divide-by-Three Logic Circuit: PurposeДокумент8 страницDesigning A Divide-by-Three Logic Circuit: PurposeJalaj JainОценок пока нет
- CSE Termwork-2018 - ALV - 2150909Документ71 страницаCSE Termwork-2018 - ALV - 2150909Milan ModhawadiyaОценок пока нет
- Lecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Документ19 страницLecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Kabo MphanyaneОценок пока нет
- Block Diagram Algebra in Control Systems - GATE Study Material in PDFДокумент6 страницBlock Diagram Algebra in Control Systems - GATE Study Material in PDFPraveen AgrawalОценок пока нет
- EEE 441 - Note IIДокумент4 страницыEEE 441 - Note IIAlex Peter OnojaОценок пока нет
- TRN4507 3.1Документ44 страницыTRN4507 3.1cyruswan156Оценок пока нет
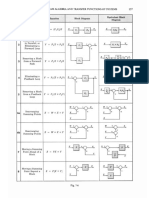
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsДокумент6 страницCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliОценок пока нет
- Gujarat Technological University: InstructionsДокумент4 страницыGujarat Technological University: Instructionsvatsalshah24Оценок пока нет
- Block Diagram ReductionДокумент14 страницBlock Diagram ReductionJamal Mesidor100% (2)
- Transfer FunctionДокумент11 страницTransfer FunctionNagmani KumarОценок пока нет
- Block Diagram Algebra PDFДокумент29 страницBlock Diagram Algebra PDFAman SinghОценок пока нет
- Lab # 8 Control SystemДокумент10 страницLab # 8 Control SystemZabeehullahmiakhailОценок пока нет
- LG Embedded Jan09Документ5 страницLG Embedded Jan09Junaid AhmadОценок пока нет
- MSD2Документ47 страницMSD2moeОценок пока нет
- Assignment 02: 1 What Is Meant by Mathematical Modelling of A Control SystemДокумент2 страницыAssignment 02: 1 What Is Meant by Mathematical Modelling of A Control SystemSyed AfzalОценок пока нет
- ENG331 Design ReportДокумент3 страницыENG331 Design ReportDhruv PatelОценок пока нет
- Mec500 Chapter 2 - AtmaДокумент31 страницаMec500 Chapter 2 - AtmaFaez FeakryОценок пока нет
- Experiment 3Документ7 страницExperiment 3Usama NadeemОценок пока нет
- 6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaДокумент23 страницы6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaSona LavaniaОценок пока нет
- Control Engg Module Wise Question and Model Question PaperДокумент82 страницыControl Engg Module Wise Question and Model Question PaperRoshan BahadurОценок пока нет
- Example Digital ControlДокумент6 страницExample Digital Controlud54Оценок пока нет
- Chapter 3: Block Diagram ModelsДокумент4 страницыChapter 3: Block Diagram ModelsMuhammed IfkazОценок пока нет
- Block Diagram and Signal Flow GraphДокумент28 страницBlock Diagram and Signal Flow GraphHarshaОценок пока нет
- L - Block Diagrams of A Control System PDFДокумент22 страницыL - Block Diagrams of A Control System PDFKunal NarangОценок пока нет
- Final Project - PPT On MIMO SystemДокумент27 страницFinal Project - PPT On MIMO SystemDebayan Sen100% (2)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlОт EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlОценок пока нет
- Nonlinear Control Feedback Linearization Sliding Mode ControlОт EverandNonlinear Control Feedback Linearization Sliding Mode ControlОценок пока нет
- Chapter 12Документ21 страницаChapter 12mantapto100% (1)
- Tabel.1. Data Hasil Pengujian Mesin Mainjet Standar Ø72Документ5 страницTabel.1. Data Hasil Pengujian Mesin Mainjet Standar Ø72mantaptoОценок пока нет
- MEG373 CHP05 ForceAnlysiswithProbsДокумент24 страницыMEG373 CHP05 ForceAnlysiswithProbsettypasewangОценок пока нет
- Combustion CharacteristicsДокумент14 страницCombustion CharacteristicsmantaptoОценок пока нет
- E Thesis Submission ArijitДокумент25 страницE Thesis Submission ArijitmantaptoОценок пока нет
- Alur Final ThesisДокумент134 страницыAlur Final ThesismantaptoОценок пока нет
- Complex Systems, Dynamics & Design: Key NoteДокумент24 страницыComplex Systems, Dynamics & Design: Key NotemantaptoОценок пока нет
- 36 Balancing R1Документ6 страниц36 Balancing R1mantaptoОценок пока нет
- Ch08 FrictionДокумент30 страницCh08 FrictionmantaptoОценок пока нет
- Programmable Logic ControllerДокумент214 страницProgrammable Logic ControllerImran Aslam67% (3)
- X-Ray Fluorescence: Energy-Dispersive Technique (EDXRF) : Advanced Physics Laboratory XRFДокумент28 страницX-Ray Fluorescence: Energy-Dispersive Technique (EDXRF) : Advanced Physics Laboratory XRFmantaptoОценок пока нет
- Modeling A Single Degree of Freedom Spring Mass System Using AnsysДокумент3 страницыModeling A Single Degree of Freedom Spring Mass System Using AnsystoshugoОценок пока нет
- X-Ray Fluorescence: Energy-Dispersive Technique (EDXRF) : Advanced Physics Laboratory XRFДокумент16 страницX-Ray Fluorescence: Energy-Dispersive Technique (EDXRF) : Advanced Physics Laboratory XRFmantaptoОценок пока нет
- 00 Front MatterДокумент8 страниц00 Front MattermantaptoОценок пока нет
- Answer To Problems F08Документ10 страницAnswer To Problems F08mantaptoОценок пока нет
- Ch16-Plane Motion of Rigid Bodies (Forces and Accelerations)Документ39 страницCh16-Plane Motion of Rigid Bodies (Forces and Accelerations)mantaptoОценок пока нет
- Week1 Elec372Документ9 страницWeek1 Elec372mantaptoОценок пока нет
- CH 10Документ22 страницыCH 10chandan_j4uОценок пока нет
- Ch15 Cinemática Dos Corpos RígidosДокумент64 страницыCh15 Cinemática Dos Corpos RígidosedpsousaОценок пока нет
- Statics: Vector Mechanics For EngineersДокумент8 страницStatics: Vector Mechanics For EngineersmantaptoОценок пока нет
- Ch09-Distributed Forces (Moments of Inertia)Документ44 страницыCh09-Distributed Forces (Moments of Inertia)mantaptoОценок пока нет
- Ch11-Kinematics of ParticlesДокумент49 страницCh11-Kinematics of ParticlesmantaptoОценок пока нет
- CH 03Документ48 страницCH 03MarceloAbiОценок пока нет
- Surging Pada Turbo Ardiansyah AbДокумент134 страницыSurging Pada Turbo Ardiansyah AbAnsyah Ardi100% (1)
- Fuels and Combustion PDFДокумент24 страницыFuels and Combustion PDFLalit MohanОценок пока нет
- Auto Turn Off Battery ChargerДокумент1 страницаAuto Turn Off Battery ChargerH3liax100% (7)
- Binder FatigueДокумент27 страницBinder FatigueJames UgoОценок пока нет
- Guideline For Design of Small Hydro Power PlantsДокумент210 страницGuideline For Design of Small Hydro Power PlantsRatnaSiswaty Amir100% (3)
- Energy DataДокумент2 страницыEnergy DatamantaptoОценок пока нет
- Marketing Plan For Paraiso Islet ResortДокумент25 страницMarketing Plan For Paraiso Islet ResortEllaine Claire Lor100% (1)
- Summarized ACLS ScriptДокумент7 страницSummarized ACLS Scriptnc.angel.niceОценок пока нет
- 9.2 Volumetric Analysis PDFДокумент24 страницы9.2 Volumetric Analysis PDFJoaquinОценок пока нет
- Task Basis JurisprudenceДокумент10 страницTask Basis JurisprudenceKerwin LeonidaОценок пока нет
- Asset Management PlanДокумент160 страницAsset Management Planbkalatus1100% (1)
- Olinger v. The Church of Jesus Christ of Latter Day Saints Et Al - Document No. 1Документ4 страницыOlinger v. The Church of Jesus Christ of Latter Day Saints Et Al - Document No. 1Justia.comОценок пока нет
- Week 6 Starbucks Leading Change 2023Документ10 страницWeek 6 Starbucks Leading Change 2023Prunella YapОценок пока нет
- 50 p7 Kids AvikdeДокумент2 страницы50 p7 Kids AvikdebankansОценок пока нет
- Unsaturated Polyester Resins: Influence of The Styrene Concentration On The Miscibility and Mechanical PropertiesДокумент5 страницUnsaturated Polyester Resins: Influence of The Styrene Concentration On The Miscibility and Mechanical PropertiesMamoon ShahidОценок пока нет
- RF Design MCQ-1Документ16 страницRF Design MCQ-1JeyavelОценок пока нет
- Introduction To The Field of Organizational BehaviorДокумент22 страницыIntroduction To The Field of Organizational BehaviorSayyid Al ArizieОценок пока нет
- Openfire XXMPP Server On Windows Server 2012 R2Документ9 страницOpenfire XXMPP Server On Windows Server 2012 R2crobertoОценок пока нет
- Collocations and IdiomsДокумент6 страницCollocations and IdiomsNguyen HuyenОценок пока нет
- Determining Rounding Common CoreДокумент2 страницыDetermining Rounding Common Coreapi-3662903730% (1)
- Advantages and Disadvantages of Global WarmingДокумент11 страницAdvantages and Disadvantages of Global WarmingA Aldika Farlis50% (2)
- Mitochondrial Mechanisms of PhotobiomodulationДокумент4 страницыMitochondrial Mechanisms of PhotobiomodulationGabrielОценок пока нет
- Institute of Actuaries of India: Subject CT3-Probability and Mathematical Statistics May 2008 ExaminationДокумент10 страницInstitute of Actuaries of India: Subject CT3-Probability and Mathematical Statistics May 2008 ExaminationeuticusОценок пока нет
- Life in The Past - Year 6 WorksheetsДокумент11 страницLife in The Past - Year 6 WorksheetstinaОценок пока нет
- Grade 5 Forces Acting On Structures and Mechanisms CirriculumДокумент3 страницыGrade 5 Forces Acting On Structures and Mechanisms Cirriculumapi-2072021750% (1)
- Paradigm Shift in Teaching: The Plight of Teachers, Coping Mechanisms and Productivity in The New Normal As Basis For Psychosocial SupportДокумент5 страницParadigm Shift in Teaching: The Plight of Teachers, Coping Mechanisms and Productivity in The New Normal As Basis For Psychosocial SupportPsychology and Education: A Multidisciplinary JournalОценок пока нет
- Rape and Challenging Contemporary ThinkingДокумент17 страницRape and Challenging Contemporary ThinkingKirthna MadhavanОценок пока нет
- TOEIC® Practice OnlineДокумент8 страницTOEIC® Practice OnlineCarlos Luis GonzalezОценок пока нет
- Malefactor ClassДокумент23 страницыMalefactor ClassMatthew Duncan100% (6)
- Danculos - M1 - L3 - Activity TasksДокумент2 страницыDanculos - M1 - L3 - Activity TasksAUDREY DANCULOSОценок пока нет
- Role of Courts in Granting Bails and Bail Reforms: TH THДокумент1 страницаRole of Courts in Granting Bails and Bail Reforms: TH THSamarth VikramОценок пока нет
- (Paper-2) 20th Century Indian Writing: Saadat Hasan Manto: Toba Tek SinghДокумент18 страниц(Paper-2) 20th Century Indian Writing: Saadat Hasan Manto: Toba Tek SinghApexa Kerai67% (3)
- Radiography Safety ProcedureДокумент9 страницRadiography Safety ProcedureأحمدآلزهوОценок пока нет
- Aroma TherapyДокумент89 страницAroma TherapyHemanth Kumar G0% (1)
- Sickle Cell AnemiaДокумент13 страницSickle Cell Anemiamayra100% (1)
- Analysing Worship in The Pentateuch and Its ApplicationДокумент12 страницAnalysing Worship in The Pentateuch and Its ApplicationDaniel Solomon100% (1)