Вам также может понравиться
- Bolt 1Документ10 страницBolt 1Shawn WaltzОценок пока нет
- An Adaptive Thresholding-Based Process Variability MonitoringДокумент16 страницAn Adaptive Thresholding-Based Process Variability MonitoringShawn WaltzОценок пока нет
- 2018 Dataset Rare Event Classification in Multivariate Time SeriesДокумент7 страниц2018 Dataset Rare Event Classification in Multivariate Time SeriesMacLeodОценок пока нет
- Facilities Planning and Design - Lecture NotesДокумент162 страницыFacilities Planning and Design - Lecture NotesVitor Moreira100% (4)
- Case 1Документ10 страницCase 1Shawn WaltzОценок пока нет
- Application of Statistical Process Control Theory in Coal and Gas Outburst PreventionДокумент9 страницApplication of Statistical Process Control Theory in Coal and Gas Outburst PreventionShawn WaltzОценок пока нет
- Statistical Process ControlДокумент7 страницStatistical Process Controlชนพัทธ์ คงพ่วงОценок пока нет
- Facility Design - An Introduction (Compatibility Mode)Документ46 страницFacility Design - An Introduction (Compatibility Mode)Vikas KatiyarОценок пока нет
- Wind Turbine Fault Diagnosis and Predictive Maintenance Through Statistical Process Control and Machine LearningДокумент13 страницWind Turbine Fault Diagnosis and Predictive Maintenance Through Statistical Process Control and Machine LearningShawn WaltzОценок пока нет
- RULA Employee Assessment Worksheet: A. Arm and Wrist Analysis B. Neck, Trunk and Leg Analysis ScoresДокумент1 страницаRULA Employee Assessment Worksheet: A. Arm and Wrist Analysis B. Neck, Trunk and Leg Analysis ScoresAlvinWijayaОценок пока нет
- Pneumatics SymbolsДокумент2 страницыPneumatics SymbolsShawn WaltzОценок пока нет
- Hydraulic Symbols: Lines Miscellaneous Units Hydraulic PumpsДокумент2 страницыHydraulic Symbols: Lines Miscellaneous Units Hydraulic PumpsShawn WaltzОценок пока нет
- Functional Gauge Designs PMPA Technical ConferenceДокумент32 страницыFunctional Gauge Designs PMPA Technical ConferenceShawn Waltz100% (1)
- Chapter 4 Second Order DEsДокумент59 страницChapter 4 Second Order DEsShawn WaltzОценок пока нет
- Assessing Risk of A Serious Failure Mode Based On Limited Field DataДокумент12 страницAssessing Risk of A Serious Failure Mode Based On Limited Field DataShawn WaltzОценок пока нет
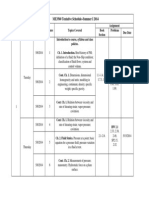
- Me 3560 Schedule Summer 2014Документ16 страницMe 3560 Schedule Summer 2014Shawn WaltzОценок пока нет
- Engineering Physics Text BookДокумент314 страницEngineering Physics Text BookShawn Waltz33% (3)
- Design gauges specificationДокумент17 страницDesign gauges specificationShawn WaltzОценок пока нет
- Me 3560 Presentation CH ViiДокумент16 страницMe 3560 Presentation CH ViiShawn WaltzОценок пока нет
- Slotted Link Mechanism SHM ExperimentДокумент6 страницSlotted Link Mechanism SHM ExperimentShawn Waltz50% (2)
- Tutorial Cylinder Simple MeshДокумент9 страницTutorial Cylinder Simple MeshShawn WaltzОценок пока нет
- Formula Sheet FourierДокумент3 страницыFormula Sheet FourierShawn WaltzОценок пока нет
- Tutorial Cylinder Refined MeshДокумент9 страницTutorial Cylinder Refined MeshShawn WaltzОценок пока нет
- Conservation of Linear MomentumДокумент7 страницConservation of Linear MomentumShawn WaltzОценок пока нет
- Conservation of Mass Equation - Di Erential FormДокумент4 страницыConservation of Mass Equation - Di Erential FormShawn WaltzОценок пока нет
- Conservation of Mass Equation - Di Erential FormДокумент4 страницыConservation of Mass Equation - Di Erential FormShawn WaltzОценок пока нет
- Me 3560 Presentation CH ViiДокумент16 страницMe 3560 Presentation CH ViiShawn WaltzОценок пока нет
- Me 3560 Presentation ChiДокумент55 страницMe 3560 Presentation ChiShawn WaltzОценок пока нет
- ME3560. Fluid Mechanics - TEST No. 2Документ5 страницME3560. Fluid Mechanics - TEST No. 2Shawn WaltzОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- catinduSENSORLVDTen 11364236687 PDFДокумент52 страницыcatinduSENSORLVDTen 11364236687 PDFLmf DanielОценок пока нет
- Patterned Sapphire SubstratesДокумент4 страницыPatterned Sapphire SubstratesSabri TraderОценок пока нет
- Compendium Book For IIT - MainsДокумент28 страницCompendium Book For IIT - MainsApex InstituteОценок пока нет
- Zinc Alloy PlatingДокумент20 страницZinc Alloy PlatingHarish Vasishtha100% (1)
- Hcs2407 141 Henkel Resin Kit Loctite Ea 9394 AeroДокумент6 страницHcs2407 141 Henkel Resin Kit Loctite Ea 9394 AeroTimmyОценок пока нет
- Ballistic Particle Manufacturing (BPM)Документ15 страницBallistic Particle Manufacturing (BPM)Senaka BandaraОценок пока нет
- 1 s2.0 0013794486900366 Main PDFДокумент9 страниц1 s2.0 0013794486900366 Main PDFEmanuel CarvalhoОценок пока нет
- Ch11 FootingsДокумент16 страницCh11 FootingsMohamedОценок пока нет
- Literature Review On FoundationДокумент6 страницLiterature Review On FoundationAhmed Shah100% (3)
- MYKSavemixSP111 PDFДокумент2 страницыMYKSavemixSP111 PDFRanaware NandkishorОценок пока нет
- Centre of Gravity EstimateДокумент25 страницCentre of Gravity EstimateKarthick MurugesanОценок пока нет
- Biophotonics201210 DLДокумент44 страницыBiophotonics201210 DLAntoniopiОценок пока нет
- 3 FTP - 2-WT PDFДокумент34 страницы3 FTP - 2-WT PDFMohama KarimiОценок пока нет
- Thermofluids Exit ReviewДокумент73 страницыThermofluids Exit Reviewben richОценок пока нет
- 07 SensorsДокумент25 страниц07 SensorsFernando Becerril ÁvilaОценок пока нет
- Stars and ConstellationsДокумент50 страницStars and ConstellationsCrisanta GanadoОценок пока нет
- Control Systems - Lecture NoteДокумент190 страницControl Systems - Lecture NoteAbenezer AchamyelehОценок пока нет
- Lecture Strength - Part 1 - Simple Stress-1Документ33 страницыLecture Strength - Part 1 - Simple Stress-1Park Kim JaeОценок пока нет
- 02 Clicker QuestionsДокумент41 страница02 Clicker QuestionsBouzoubaa OmarОценок пока нет
- Energy Conversion and Management: Ümmühan Basßaran Filik, Ömer Nezih Gerek, Mehmet KurbanДокумент13 страницEnergy Conversion and Management: Ümmühan Basßaran Filik, Ömer Nezih Gerek, Mehmet Kurbanakash_chandraya4200Оценок пока нет
- 5th Form Alternative To Sba Paper 2012 AnswersДокумент4 страницы5th Form Alternative To Sba Paper 2012 AnswersFrank MassiahОценок пока нет
- 53 Tutorial Mouse enДокумент15 страниц53 Tutorial Mouse enh_eijy2743Оценок пока нет
- Chemistry Lab Report 4 (Chromatography)Документ5 страницChemistry Lab Report 4 (Chromatography)Daniel LohОценок пока нет
- BP Chapter 13 - Understanding the Causes of FoxingДокумент23 страницыBP Chapter 13 - Understanding the Causes of FoxingSonia KataОценок пока нет
- Universal Properties of Halo Nuclei: H.-W. HammerДокумент25 страницUniversal Properties of Halo Nuclei: H.-W. HammerHicham Al FalouОценок пока нет
- Classification and Characteristics of Rolling Bearings Classification and Characteristics of Rolling BearingsДокумент5 страницClassification and Characteristics of Rolling Bearings Classification and Characteristics of Rolling Bearingsshahnawaz G 27Оценок пока нет
- L5 MU EE1ME - Differentiation - STDДокумент25 страницL5 MU EE1ME - Differentiation - STDDinОценок пока нет
- Dam Safety Insts - InhydroДокумент214 страницDam Safety Insts - Inhydro@nshu_theachiever0% (1)
- Reg. No. : ME 2266 — STATISTICS AND NUMERICAL METHODS exam paperДокумент5 страницReg. No. : ME 2266 — STATISTICS AND NUMERICAL METHODS exam paperRahul singhОценок пока нет
- Viscous Flow in Multiple PipesДокумент21 страницаViscous Flow in Multiple PipesKhalid AlhashimОценок пока нет