Вам также может понравиться
- Robot Manipulators: Modeling, Performance Analysis and ControlОт EverandRobot Manipulators: Modeling, Performance Analysis and ControlОценок пока нет
- Planar Linkage Synthesis: A modern CAD based approachОт EverandPlanar Linkage Synthesis: A modern CAD based approachОценок пока нет
- Introduction To Robotics: TextsДокумент17 страницIntroduction To Robotics: TextsVienNgocQuangОценок пока нет
- Current & Future Trends in RoboticsДокумент32 страницыCurrent & Future Trends in Roboticsbooks sanОценок пока нет
- Introduction To Concepts in RoboticsДокумент26 страницIntroduction To Concepts in RoboticsزهديابوانسОценок пока нет
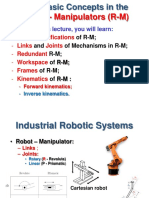
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Документ28 страницTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirОценок пока нет
- 2 Marks Question & AnswerДокумент9 страниц2 Marks Question & AnswerShanmuga PriyaОценок пока нет
- Robot ArchitecturesДокумент72 страницыRobot ArchitecturesRyder Jhymsen50% (2)
- منهج كاملДокумент163 страницыمنهج كاملmohammedezz.htiОценок пока нет
- FYP PresentationДокумент81 страницаFYP PresentationTarek Bmr100% (1)
- EC7010 Robotics and AutomationДокумент24 страницыEC7010 Robotics and Automationbooks sanОценок пока нет
- Robotics Lecture NoteДокумент245 страницRobotics Lecture NoteAmanuel ChalchisaОценок пока нет
- Lecture1 2019Документ27 страницLecture1 2019JuliusОценок пока нет
- Manufacturing Equipment: Industrial Robotics - Introduction Industrial Robotics - IntroductionДокумент42 страницыManufacturing Equipment: Industrial Robotics - Introduction Industrial Robotics - IntroductionpiyushaaquaОценок пока нет
- Advances in Robotics Lecture 5.Документ78 страницAdvances in Robotics Lecture 5.AkashОценок пока нет
- Introduction To Robotics: Kinematics and Motion PlanningДокумент24 страницыIntroduction To Robotics: Kinematics and Motion PlanningdviryОценок пока нет
- RoboticsДокумент32 страницыRoboticsAsh5367Оценок пока нет
- Industrial Robotics: The Heart of Modern ManufacturingДокумент36 страницIndustrial Robotics: The Heart of Modern ManufacturingGaneshОценок пока нет
- Emg 2504 CN1 2017Документ6 страницEmg 2504 CN1 2017Vasda VinciОценок пока нет
- Industrial Robotics: Course OutcomesДокумент74 страницыIndustrial Robotics: Course OutcomesMeenakshi PriyaОценок пока нет
- Lecture RoboticsДокумент50 страницLecture Roboticsmanikandannadar100% (1)
- Robotics and Automation Part 1Документ61 страницаRobotics and Automation Part 1aoauaz2000Оценок пока нет
- Lec 2 Robot ManipulatorsДокумент14 страницLec 2 Robot ManipulatorsAjanthan AlagaratnamОценок пока нет
- Lec02 ManipulatorsДокумент7 страницLec02 ManipulatorsMohamad YazidОценок пока нет
- Lecture 1Документ50 страницLecture 1Sheeraz AliОценок пока нет
- Chapter 4 Lecture Notes (Joints & End-Effector) - 02 JunДокумент57 страницChapter 4 Lecture Notes (Joints & End-Effector) - 02 Junakash kahsyapОценок пока нет
- MEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationДокумент3 страницыMEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationInzamam Ul HaqueОценок пока нет
- Introduction To Concepts in RoboticsДокумент22 страницыIntroduction To Concepts in Roboticsharikiran3285Оценок пока нет
- Lecture 1Документ42 страницыLecture 1zeshan.hfd7866Оценок пока нет
- Advanced Robotics DR BobДокумент166 страницAdvanced Robotics DR Bober_arun76Оценок пока нет
- 15 Robotics IntroДокумент116 страниц15 Robotics IntroSuren EzОценок пока нет
- Robotics Powerpoint PresentationДокумент25 страницRobotics Powerpoint PresentationPrakhar 'Mustang' Bhardwaj100% (2)
- Robotics Lab ManualДокумент26 страницRobotics Lab ManualAbhijeet Sahu100% (3)
- 2020R1 StructuresДокумент193 страницы2020R1 Structuresagrbovic100% (1)
- Industrial RoboticsДокумент77 страницIndustrial RoboticsIslam Fouad100% (4)
- Robotics IntroДокумент32 страницыRobotics IntroMadhusudhan D100% (1)
- Field RoboticsДокумент70 страницField RoboticsSkanda SwaroopОценок пока нет
- Robotics MotionДокумент29 страницRobotics MotionfenixnomahotmailcomОценок пока нет
- Kinematic Modelling of RobotsДокумент36 страницKinematic Modelling of Robotsusmanali17Оценок пока нет
- Robot ArchitecturesДокумент72 страницыRobot ArchitecturesHODCIVILОценок пока нет
- Robotics: Kinematics, Dynamics and Motion Control Module 3 VITДокумент52 страницыRobotics: Kinematics, Dynamics and Motion Control Module 3 VITHarisankar R N R 21BRS1524Оценок пока нет
- Introduction To RoboticsДокумент60 страницIntroduction To RoboticsJOEL STEPHEN 19BEE0262Оценок пока нет
- Principles of RoboticsДокумент81 страницаPrinciples of RoboticssvenkatprasatОценок пока нет
- ES205 IntroДокумент75 страницES205 IntroWarstilide49Оценок пока нет
- Csir Co4 PDFДокумент100 страницCsir Co4 PDFRam MОценок пока нет
- Robotics Unit2Документ8 страницRobotics Unit2harikiran3285Оценок пока нет
- Final Project PresentationДокумент29 страницFinal Project PresentationCiro Soto GarciaОценок пока нет
- What Is A Parallel RobotДокумент46 страницWhat Is A Parallel Robotminh_bk0101Оценок пока нет
- SMEA3012Документ75 страницSMEA3012William Jaya PrakashОценок пока нет
- Unit1 - Fundamentals of Robotics - Industrial RoboticsДокумент60 страницUnit1 - Fundamentals of Robotics - Industrial RoboticsShankar PawarОценок пока нет
- Unit 1 Introduction RoboticsДокумент48 страницUnit 1 Introduction RoboticsJagraj SinghОценок пока нет
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionДокумент62 страницы2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJОценок пока нет
- Robotics Lab Manual PDFДокумент26 страницRobotics Lab Manual PDFSam Paul100% (5)
- Unit 1 - IntroductionДокумент33 страницыUnit 1 - IntroductionRavi KantОценок пока нет
- Introduction To Robotics: A Common View: Robots As HumanoidsДокумент24 страницыIntroduction To Robotics: A Common View: Robots As HumanoidsmaniОценок пока нет
- Dinkar Singh SengarДокумент11 страницDinkar Singh SengarŚandeep Ķumar ŠinghОценок пока нет
- Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator RobotДокумент22 страницыInverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator Robotvishakha bangareОценок пока нет
- Unit1 - Basic ConceptsДокумент73 страницыUnit1 - Basic ConceptsSharmila83Оценок пока нет
- Space Robotics: Presented by Abc IV-Btech Mechnical EngineeringДокумент36 страницSpace Robotics: Presented by Abc IV-Btech Mechnical EngineeringVinayak PaneriОценок пока нет
- Lecture 2 DR M AYAZ SHIRAZI NUST RoboticsДокумент81 страницаLecture 2 DR M AYAZ SHIRAZI NUST RoboticsOwais JafriОценок пока нет
- Chapter 1 Physical Quantities and UnitsДокумент37 страницChapter 1 Physical Quantities and UnitsHu XiaoОценок пока нет
- PV Grid Integration: Backgrounds, Requirements, and SMA SolutionsДокумент36 страницPV Grid Integration: Backgrounds, Requirements, and SMA SolutionsParthibanPerumalОценок пока нет
- About Daniel BernoulliДокумент2 страницыAbout Daniel BernoulliIrfanОценок пока нет
- WAVES Group ActivityДокумент2 страницыWAVES Group ActivityAnna Marie ArguellesОценок пока нет
- Air Entrainment in Vertical DropshaftsДокумент199 страницAir Entrainment in Vertical DropshaftsZeroRecoОценок пока нет
- Civflum Quiz 1Документ4 страницыCivflum Quiz 1Jhun CastroОценок пока нет
- (L4) - (JLD 2.0) - Mole Concept - 20 AprДокумент48 страниц(L4) - (JLD 2.0) - Mole Concept - 20 AprUmair KhanОценок пока нет
- Week 3 (Vector Addition)Документ51 страницаWeek 3 (Vector Addition)Aris Dwyane M PascualОценок пока нет
- Periodical Grade 4 ScienceДокумент9 страницPeriodical Grade 4 Sciencelucel baganoОценок пока нет
- LectureДокумент23 страницыLectureabasОценок пока нет
- Report BreeveldДокумент115 страницReport BreeveldGoran JakimovskiОценок пока нет
- Crgo1 PDFДокумент8 страницCrgo1 PDFimadhuryya5023Оценок пока нет
- Trigonometric Sum, Difference, Product Identities & EquationsДокумент2 страницыTrigonometric Sum, Difference, Product Identities & EquationsAnderson AlfredОценок пока нет
- Bes Carey Foster SДокумент5 страницBes Carey Foster SIshan MondalОценок пока нет
- PHYSICS-03-03 - (12th & 13th) Paper 1.pdf SOLUTIONДокумент8 страницPHYSICS-03-03 - (12th & 13th) Paper 1.pdf SOLUTIONRaju SinghОценок пока нет
- Practical List of Applied Physics LabДокумент28 страницPractical List of Applied Physics Labashraf khanОценок пока нет
- Steady Magnetic FieldДокумент50 страницSteady Magnetic FieldVISHAL PawarОценок пока нет
- Instrumentation NotesДокумент61 страницаInstrumentation NotesVidya Muthukrishnan100% (1)
- DIY Induction Heater PDFДокумент10 страницDIY Induction Heater PDFPol IllaОценок пока нет
- Smits Text Part1Документ338 страницSmits Text Part1hyacintumОценок пока нет
- CAPE Chemistry U2 Lab - Thermometric Titration (SAMPLE)Документ5 страницCAPE Chemistry U2 Lab - Thermometric Titration (SAMPLE)Haxara SimsОценок пока нет
- Beams-Shear and Moment 2Документ28 страницBeams-Shear and Moment 2ZdenkoОценок пока нет
- Deep Learning in Science Theory, Algorithms, and ApplicationsДокумент8 страницDeep Learning in Science Theory, Algorithms, and ApplicationsUsman AliОценок пока нет
- 1st Sem ExptsДокумент10 страниц1st Sem ExptsRavi Kanth M NОценок пока нет
- Modeling of Reinforced Concrete BeamДокумент28 страницModeling of Reinforced Concrete BeamNGUYEN89% (27)
- Dispersion Measurement: Optical Fiber Communications Labratory Lab Report No. 5Документ19 страницDispersion Measurement: Optical Fiber Communications Labratory Lab Report No. 5Sahand Noorizadeh100% (2)
- UPFC Using A Power Electronics Integrated TransformerДокумент7 страницUPFC Using A Power Electronics Integrated TransformerAnsar Pasha100% (1)
- Joseph Louis GayДокумент2 страницыJoseph Louis Gaypengujian psmbОценок пока нет
- 10 - Chapter 2Документ72 страницы10 - Chapter 2varaprasad93Оценок пока нет
- Introduction To: Transport PhenomenaДокумент11 страницIntroduction To: Transport Phenomenadeepak patidarОценок пока нет