Вам также может понравиться
- Transmisión Allison 4500Документ117 страницTransmisión Allison 4500JuanJoseMecanicadieselArias100% (2)
- Lenguaje Verbal - No Verbal y ParaverbalДокумент15 страницLenguaje Verbal - No Verbal y ParaverbalgenesisОценок пока нет
- Cuestionario FinalДокумент12 страницCuestionario FinalRodrigo LFОценок пока нет
- Diseño de Pozo de Absorcion PluvialДокумент9 страницDiseño de Pozo de Absorcion PluvialVictor Alfonso Lopez Ortega0% (1)
- Evaluacion Consolidado 2 Calc. DiferencialДокумент2 страницыEvaluacion Consolidado 2 Calc. DiferencialVictorHugoMoynaHuillcaОценок пока нет
- Relación Calidad Competitividad OrganizaciónДокумент2 страницыRelación Calidad Competitividad OrganizaciónkikeОценок пока нет
- CONSTANT, Benjamín, Curso de Política Constitucional (1819), Pp. 1-16Документ10 страницCONSTANT, Benjamín, Curso de Política Constitucional (1819), Pp. 1-16andresabelrОценок пока нет
- Direccionamiento DirectoДокумент4 страницыDireccionamiento DirectoOscar RodriguezОценок пока нет
- SimposioDeBufalos2006 Pasado Presente y Futirp Del Bufalo en Colombia PDFДокумент277 страницSimposioDeBufalos2006 Pasado Presente y Futirp Del Bufalo en Colombia PDFYenny RodriguezОценок пока нет
- Inti Raymi Crossword Puzzle-Answer KeyДокумент1 страницаInti Raymi Crossword Puzzle-Answer KeyrevarzuОценок пока нет
- Riesgos Proporcionales de CoxДокумент17 страницRiesgos Proporcionales de CoxjesisОценок пока нет
- Plan Anual Del SgasДокумент36 страницPlan Anual Del SgasJohn FloresОценок пока нет
- Hec Ras MapaДокумент3 страницыHec Ras MapaJessenia MonteroОценок пока нет
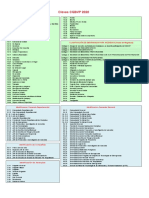
- Claves CGBVP 2020Документ1 страницаClaves CGBVP 2020Paola Azucena SalasОценок пока нет
- Propuesta Investigacion Sobre Administracion EscolarДокумент16 страницPropuesta Investigacion Sobre Administracion EscolarMargarita PeralesОценок пока нет
- Rúbrica de La Tarea Académica 1 - 2018-3Документ1 страницаRúbrica de La Tarea Académica 1 - 2018-3Anonymous P39JBwОценок пока нет
- Ensayo Academico 2Документ4 страницыEnsayo Academico 2aledayaОценок пока нет
- Competencias Profesionales Del Psicologo EducativoДокумент2 страницыCompetencias Profesionales Del Psicologo EducativoAntonio CoronaОценок пока нет
- OxapampaДокумент3 страницыOxapampaMIGUEL LEON SALAZARОценок пока нет
- Ballou 09Документ105 страницBallou 09Paolo ZanoniОценок пока нет
- Informe Semestral de Plan LectorДокумент2 страницыInforme Semestral de Plan LectorRoxana Ch.Оценок пока нет
- Presentación Lo ImposibleДокумент2 страницыPresentación Lo ImposibleCristóbalОценок пока нет
- Darialis Acosta Act1-1 Adm VentasДокумент3 страницыDarialis Acosta Act1-1 Adm VentasDionidy RodriguezОценок пока нет
- Introducción A La Filosofía de CalidadДокумент9 страницIntroducción A La Filosofía de CalidadXochilt AnzaОценок пока нет
- Manual de Participación Estudiantil para El FortalecimientoДокумент179 страницManual de Participación Estudiantil para El FortalecimientoAracely JiménezОценок пока нет
- Anexo LenguadoДокумент47 страницAnexo LenguadoCarlos Aleman AsteОценок пока нет
- Informe FuerzasДокумент7 страницInforme Fuerzasalejo velasquezОценок пока нет
- CMM Principios y PracticasДокумент13 страницCMM Principios y PracticassethasgОценок пока нет
- Trabajo Final CostosДокумент7 страницTrabajo Final CostosJenniifer Piiedrahiita100% (1)
- Ensayo EtnohistoriaДокумент8 страницEnsayo EtnohistoriaIván Ortega CollilefОценок пока нет