Вам также может понравиться
- Los Siete Errores Más Comunes en Equipo HidráulicoДокумент4 страницыLos Siete Errores Más Comunes en Equipo HidráulicoMario Cesar Pineda NunezОценок пока нет
- Temario Curso Hidraulica Basica y AvanzadaДокумент2 страницыTemario Curso Hidraulica Basica y AvanzadaMario Cesar Pineda NunezОценок пока нет
- El Posicionador, Concepto y Tipos (Presentacion)Документ7 страницEl Posicionador, Concepto y Tipos (Presentacion)Mario Cesar Pineda NunezОценок пока нет
- Temario NeumaticaДокумент2 страницыTemario NeumaticaMario Cesar Pineda Nunez0% (1)
- Interruptores Neumaticos de PotenciaДокумент11 страницInterruptores Neumaticos de PotenciaMario Cesar Pineda Nunez100% (1)
- El Ciclo Mecanico de La RefrigeracionДокумент12 страницEl Ciclo Mecanico de La RefrigeracionMario Cesar Pineda Nunez100% (3)
- 03 Problem AsДокумент12 страниц03 Problem AsFernando NuñoОценок пока нет
- Qué Define Una Empresa ExitosaДокумент2 страницыQué Define Una Empresa Exitosajosecova6Оценок пока нет
- Perfil de Tesis para EntregarДокумент38 страницPerfil de Tesis para EntregarSusana Paredes Ortiz0% (1)
- Desarmado de Camiones Cat 785d #82 #87Документ2 страницыDesarmado de Camiones Cat 785d #82 #87juanvillalobos2022Оценок пока нет
- Memoria Descriptiva CiraДокумент95 страницMemoria Descriptiva CiraAlan SegundoОценок пока нет
- Sesion 1 - Ejemplo RFIДокумент9 страницSesion 1 - Ejemplo RFIJovanny SuazoОценок пока нет
- 03.04.12 Cunetas Revestidas 3Документ3 страницы03.04.12 Cunetas Revestidas 3Gabriel TenorioОценок пока нет
- Instrucciones de RecargaДокумент4 страницыInstrucciones de Recargadexter128x100% (1)
- Ergonomia 2 PDFДокумент28 страницErgonomia 2 PDFAngel MartinezОценок пока нет
- Ensayo AhuellamientoДокумент2 страницыEnsayo AhuellamientoDamian TerrazaОценок пока нет
- Foda Cobit5Документ2 страницыFoda Cobit5Kelvin BarahonaОценок пока нет
- Cultivo de La PitayaДокумент8 страницCultivo de La PitayaSanchez YeisonОценок пока нет
- Paulina Gonzalez Arboleda Borrador Art AcademicoДокумент4 страницыPaulina Gonzalez Arboleda Borrador Art AcademicoPaulina GonzalezОценок пока нет
- Tercera Entrega de MonografiasДокумент8 страницTercera Entrega de MonografiasbibliofceaОценок пока нет
- La Revolución Industrial Inglesa Del Siglo XVIIIДокумент4 страницыLa Revolución Industrial Inglesa Del Siglo XVIIICecilia NataliaОценок пока нет
- Usando Convenciones de NombresДокумент4 страницыUsando Convenciones de NombresNico LuisОценок пока нет
- Microscopio de Luz Ultraviolet A y FluorescenciaДокумент3 страницыMicroscopio de Luz Ultraviolet A y FluorescenciaPablo SeguraОценок пока нет
- Teorias de Falla Carga EstaticaДокумент16 страницTeorias de Falla Carga EstaticaSDaniela Aquino0% (1)
- Graficos en MatlabДокумент2 страницыGraficos en MatlabLopez Mercado IvanОценок пока нет
- Análisis Gestión Ambiental de La Empresa CemexДокумент9 страницAnálisis Gestión Ambiental de La Empresa CemexSebastian ChavezОценок пока нет
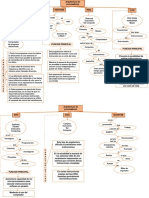
- Mapa ConceptualДокумент2 страницыMapa ConceptualJose LuisОценок пока нет
- Auscultación WordДокумент31 страницаAuscultación WordMily SuyónОценок пока нет
- Apuntes Capitulo 1 Ccna 2 PDFДокумент11 страницApuntes Capitulo 1 Ccna 2 PDFpahiescorpОценок пока нет
- Infografía MEGLДокумент4 страницыInfografía MEGLMarx E LopezОценок пока нет
- Nesitelco Ltda: Mantenimiento Correctivo Y Preventivo BtsДокумент0 страницNesitelco Ltda: Mantenimiento Correctivo Y Preventivo BtsPabloОценок пока нет
- Introducción A JSONДокумент6 страницIntroducción A JSONCesar Rios Torres0% (1)
- INCALPACAДокумент23 страницыINCALPACAAlberto Perdomo100% (2)
- Informe 7 FinalДокумент10 страницInforme 7 Finalcesar canalesОценок пока нет
- R D 145 1-2017-PNSRДокумент24 страницыR D 145 1-2017-PNSREfrain Osmar Vásquez Ayala100% (1)