Вам также может понравиться
- 23 Evidencia 3 Informe Indicadores de Gestión Del Talento HumanoДокумент4 страницы23 Evidencia 3 Informe Indicadores de Gestión Del Talento Humanojohantan castañedaОценок пока нет
- EscalaS y Medidas Sobre FotografíasДокумент6 страницEscalaS y Medidas Sobre FotografíaskaisermcintyreОценок пока нет
- Coherencia Semántica+apunteДокумент4 страницыCoherencia Semántica+apuntejpc87Оценок пока нет
- Trabajo Fase 5.Документ10 страницTrabajo Fase 5.jose arroyo ordoñezОценок пока нет
- Los Gráficos de Líneas Nos Brindan Información para La Toma de Decisiones MATEMÁTICAДокумент3 страницыLos Gráficos de Líneas Nos Brindan Información para La Toma de Decisiones MATEMÁTICAcristopher 12Оценок пока нет
- Ponencia Teoria de La ComplejidadДокумент7 страницPonencia Teoria de La Complejidadstocol_6hotmailcomОценок пока нет
- Anne Marie El SinarquismoДокумент17 страницAnne Marie El SinarquismotuzoregioОценок пока нет
- Movimiento de TierraДокумент62 страницыMovimiento de TierraRoderick Xavier CastilloОценок пока нет
- Trabajo Revisión Estadística DescriptivaДокумент12 страницTrabajo Revisión Estadística DescriptivaRonnie Buho Bejeguen33% (3)
- Reporte FINAL MicroДокумент2 страницыReporte FINAL MicroM C Black HeartОценок пока нет
- S6 FuncionesДокумент27 страницS6 FuncionesJessica JanetОценок пока нет
- Etica Empresarial UberДокумент2 страницыEtica Empresarial Uberjuan0% (1)
- Diagramas de FlujoДокумент10 страницDiagramas de FlujoBeastieux Zeroo100% (41)
- Filmus - Estado Sociedad y Educacion en La ArgentinaДокумент18 страницFilmus - Estado Sociedad y Educacion en La ArgentinaalejandraОценок пока нет
- Técnicas de Evaluación No TradicionalesДокумент7 страницTécnicas de Evaluación No TradicionalesdriquelmeОценок пока нет
- Temario de MetodologíaДокумент6 страницTemario de MetodologíaOscar ValdesОценок пока нет
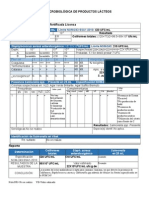
- CCA - ft.PT-011 - Conserva de Hígado de Pollo Con Vegetales 2Документ2 страницыCCA - ft.PT-011 - Conserva de Hígado de Pollo Con Vegetales 2GinaMedinaReОценок пока нет
- Diseño de Un Triciclo Impulsado Mediante Empuje LinealДокумент23 страницыDiseño de Un Triciclo Impulsado Mediante Empuje LinealsebastianОценок пока нет
- Convivencia y Seguridad Ciudadana 2015Документ20 страницConvivencia y Seguridad Ciudadana 2015Eliana Milena Rios RiveraОценок пока нет
- Cuento La Princesa LacaДокумент6 страницCuento La Princesa LacaRuth GilОценок пока нет
- Julius Evola - La Palabra Oscura Del Paisaje InteriorДокумент20 страницJulius Evola - La Palabra Oscura Del Paisaje InteriorJosé Antonio Hernández García100% (2)
- PruebasДокумент15 страницPruebasEninaj NasusОценок пока нет
- Carta Didactica #5Документ3 страницыCarta Didactica #5Mónica RaudaОценок пока нет
- Temperatura EquivalenteДокумент28 страницTemperatura EquivalentelapochalazulmaОценок пока нет
- Sistema de Ecuaciones Lineales 2x2Документ4 страницыSistema de Ecuaciones Lineales 2x2yormanОценок пока нет
- Coe AeroДокумент170 страницCoe AeroSandra QCОценок пока нет
- Taller CESI Empatía-Octavo BásicoДокумент4 страницыTaller CESI Empatía-Octavo BásicoYesenia MoralesОценок пока нет
- Reglamento - Tasa para El Uso de La Terminal de Buses (20!11!12)Документ6 страницReglamento - Tasa para El Uso de La Terminal de Buses (20!11!12)Alvarito Darwich RamalloОценок пока нет
- Newbold Ejercicios Variables AleatoriasДокумент13 страницNewbold Ejercicios Variables AleatoriasVale López Díaz0% (1)
- Micrositing Parte 1Документ18 страницMicrositing Parte 1Juanes CevallosОценок пока нет