Вам также может понравиться
- AC DC DrivesДокумент13 страницAC DC Drives322399mk7086Оценок пока нет
- Ouija BoardДокумент9 страницOuija BoardDE-PAT100% (1)
- Rectangular DuctДокумент67 страницRectangular DuctAUCE9802100% (3)
- Ac DrivesДокумент36 страницAc Drivesaswardi50% (2)
- EEU453 Industrial DrivesДокумент1 страницаEEU453 Industrial DrivesSatish NurukurthiОценок пока нет
- AC Voltage Contoller Circuits by MMRДокумент124 страницыAC Voltage Contoller Circuits by MMRananthashyam201Оценок пока нет
- ECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsДокумент61 страницаECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsVikas PatelОценок пока нет
- Unit Iii Induction Motor Drives: Dept. of EEEДокумент17 страницUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarОценок пока нет
- 02 Intro To FOCДокумент55 страниц02 Intro To FOCIgor ErcegОценок пока нет
- Lec9 - Basics of Electric Drives - IMДокумент10 страницLec9 - Basics of Electric Drives - IMTeofilo DedietroОценок пока нет
- Understanding Wave-Particle DualityДокумент15 страницUnderstanding Wave-Particle DualityomerpaОценок пока нет
- Understand How Three Phase Induction Motors WorkДокумент86 страницUnderstand How Three Phase Induction Motors WorkSelva SamОценок пока нет
- E-Motor Technologies for EV: Motors, Controllers, Drivers and Advanced OptionsДокумент41 страницаE-Motor Technologies for EV: Motors, Controllers, Drivers and Advanced Optionsvarun sharmaОценок пока нет
- Sensorless Trapezoidal Control of BLDC MotorsДокумент38 страницSensorless Trapezoidal Control of BLDC MotorsYang ElvisQUОценок пока нет
- Harmonics MCPQG Ieee 2005Документ54 страницыHarmonics MCPQG Ieee 200523OtterОценок пока нет
- Electric Vehicle Lecture on Batteries and Storage DevicesДокумент50 страницElectric Vehicle Lecture on Batteries and Storage DevicesBhargavi KmОценок пока нет
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridДокумент4 страницыSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarОценок пока нет
- Chapter 5: Speed-Torque Characteristics of Electric MotorsДокумент46 страницChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxОценок пока нет
- Induction Motor (Asynchronous Motor) : Electrical MachinesДокумент41 страницаInduction Motor (Asynchronous Motor) : Electrical MachinesNAITIKОценок пока нет
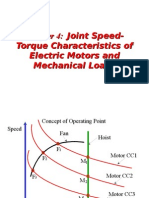
- Joint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsДокумент5 страницJoint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsFrozenTuxОценок пока нет
- Control of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoreДокумент25 страницControl of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoremayajogiОценок пока нет
- Power Electronic CircuitsДокумент47 страницPower Electronic CircuitsFrozenTuxОценок пока нет
- Ssemd PPT1Документ205 страницSsemd PPT1control 4uonlyОценок пока нет
- VECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSДокумент6 страницVECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSThinseepОценок пока нет
- 17ee82 - Ida - Mod 3 NotesДокумент38 страниц17ee82 - Ida - Mod 3 NotesManish Kumar SahaniОценок пока нет
- Documentation of PMSMДокумент89 страницDocumentation of PMSM07be1a0213Оценок пока нет
- BLDC and PMS Motor ComparisonДокумент26 страницBLDC and PMS Motor ComparisonAnimesh MukherjeeОценок пока нет
- Arduino Based DC Motor Speed ControlДокумент12 страницArduino Based DC Motor Speed Controlprabhu rachutiОценок пока нет
- PMSM Control Strategy ComparisonДокумент4 страницыPMSM Control Strategy Comparisonpersian67Оценок пока нет
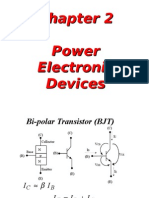
- Chapter2 DevicesДокумент33 страницыChapter2 DevicesFrozenTuxОценок пока нет
- Injection of EMF in Rotor Circuit PDFДокумент5 страницInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Induction Motor ModelДокумент31 страницаInduction Motor ModelMohammedHaythamОценок пока нет
- EE8005 Special Electrical Machines A Course Material OnДокумент151 страницаEE8005 Special Electrical Machines A Course Material OnjoОценок пока нет
- Wound-Field Synchronous Machine DrivesДокумент62 страницыWound-Field Synchronous Machine DrivesKorlpate BhaskarОценок пока нет
- Closed Loop Control For A Brushless DC Motor To RuДокумент1 страницаClosed Loop Control For A Brushless DC Motor To RuscribsunilОценок пока нет
- BLDCДокумент6 страницBLDCsandeep_036Оценок пока нет
- DC Motor ObjectivesДокумент13 страницDC Motor ObjectivesAvik PoudelОценок пока нет
- 17ee82 - Ida - Mod 4 NotesДокумент18 страниц17ee82 - Ida - Mod 4 NotesManish Kumar SahaniОценок пока нет
- Prof DR Johann W Kolar PDFДокумент82 страницыProf DR Johann W Kolar PDFaswardiОценок пока нет
- Servo Basico x1Документ18 страницServo Basico x1Elvis Torres QuispeОценок пока нет
- Advanced Topics in Power ElectronicsДокумент1 страницаAdvanced Topics in Power Electronicsdileepk1989Оценок пока нет
- Closed Loop Control of Stepper Motor Without Position SensorДокумент9 страницClosed Loop Control of Stepper Motor Without Position SensorlamushkОценок пока нет
- Lab MachineДокумент9 страницLab MachineAnonymous ryvoPIDОценок пока нет
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabДокумент12 страницModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationОценок пока нет
- CMR Institute of Technology, Bangalore: Link To Detailed SyllabusДокумент6 страницCMR Institute of Technology, Bangalore: Link To Detailed SyllabusChithra Manivelan0% (1)
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveДокумент5 страницPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelОценок пока нет
- Switched Reluctance MotorДокумент75 страницSwitched Reluctance Motor15BEE1120 ISHAV SHARDAОценок пока нет
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineДокумент29 страницToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167Оценок пока нет
- Construction and Working of Brushless DC PDFДокумент12 страницConstruction and Working of Brushless DC PDFaswardi8756Оценок пока нет
- Wireless Based Railway Bridge Damage & Track Fault Notification With Alarm SystemsДокумент5 страницWireless Based Railway Bridge Damage & Track Fault Notification With Alarm Systemsமணிவேல் சந்திரன்100% (1)
- SPWMДокумент16 страницSPWMSatyanarayana GurramОценок пока нет
- Section 5 - Induction Motor Drive PDFДокумент55 страницSection 5 - Induction Motor Drive PDFlalitbickОценок пока нет
- DC to DC Converter FundamentalsДокумент40 страницDC to DC Converter FundamentalsJamir CalОценок пока нет
- 01 Control Structures PDFДокумент22 страницы01 Control Structures PDFJeff RobertОценок пока нет
- Speed Control of BLDC Motor For Electric Vehicle: Presented byДокумент13 страницSpeed Control of BLDC Motor For Electric Vehicle: Presented byPawan ChauhanОценок пока нет
- III Eee 05 Ee8501 Psa Unit 1Документ37 страницIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANОценок пока нет
- Effect of Source InductanceДокумент25 страницEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- BrakingДокумент19 страницBrakingMohammad Umar RehmanОценок пока нет
- Ee 1403 Solid State DrivesДокумент14 страницEe 1403 Solid State DrivesPanchi AgrawalОценок пока нет
- EE333 Electrical Machines Lab IIДокумент2 страницыEE333 Electrical Machines Lab IIvpzfarisОценок пока нет
- G2 Consulting - Motor Design and Power Electronics Course OverviewДокумент188 страницG2 Consulting - Motor Design and Power Electronics Course OverviewFehan Arif MalikОценок пока нет
- Division of San Jose City San Jose City National High SchoolДокумент3 страницыDivision of San Jose City San Jose City National High SchoolPaul Vincent LauretaОценок пока нет
- Recent Developments in Turbulence Management (1991)Документ343 страницыRecent Developments in Turbulence Management (1991)Irfan MahmoodОценок пока нет
- Spherical Harmonic Representation of The Gravity Field PotentialДокумент15 страницSpherical Harmonic Representation of The Gravity Field PotentialLuca PiccottiОценок пока нет
- Physics Lab OnlineДокумент11 страницPhysics Lab Onlinepriyanshu rajputОценок пока нет
- Steif Chapter 4 ExcerptДокумент12 страницSteif Chapter 4 ExcerptbmyertekinОценок пока нет
- UUM509E - Homework 2Документ1 страницаUUM509E - Homework 2Gürkan SarıkayaОценок пока нет
- EarthquakeДокумент49 страницEarthquakeNupur BhadraОценок пока нет
- Lec 10 Pile Capacity of Cohesive SoilsДокумент24 страницыLec 10 Pile Capacity of Cohesive SoilsHasham. kkОценок пока нет
- Pusat Tuition Makrifat Chapter 3.3 F.4.PhyДокумент5 страницPusat Tuition Makrifat Chapter 3.3 F.4.PhyBazil BoliaОценок пока нет
- Laminar Flow between Fixed Parallel PlatesДокумент11 страницLaminar Flow between Fixed Parallel PlatesLeillane BeatrizОценок пока нет
- In-Situ Customization of The Helical Pile Design Procedure Using Plaxis 2DДокумент7 страницIn-Situ Customization of The Helical Pile Design Procedure Using Plaxis 2DPacho ArbelaezОценок пока нет
- Comparison of Oman Seismic Code For Buildings With International CounterpartsДокумент12 страницComparison of Oman Seismic Code For Buildings With International CounterpartskarlОценок пока нет
- Yield Line TheoryДокумент13 страницYield Line TheoryTinotenda Privilege TaonaОценок пока нет
- Food Process Engineering PrinciplesДокумент147 страницFood Process Engineering Principlesarif prasetyoОценок пока нет
- Mechanical Systems: Translational RotationalДокумент30 страницMechanical Systems: Translational RotationalHussainОценок пока нет
- Physics Lesson (Lesson 1)Документ4 страницыPhysics Lesson (Lesson 1)Douglas Kufre-Abasi GilbertОценок пока нет
- Adobe Scan Feb 10, 2021Документ4 страницыAdobe Scan Feb 10, 2021Filip SalekОценок пока нет
- CE-203 LAB File Engineering Mechanics Nishant Sharma 2K20/CE/102Документ10 страницCE-203 LAB File Engineering Mechanics Nishant Sharma 2K20/CE/1022K2O-A17-11 Vishal GuptaОценок пока нет
- Physics 4C0102 Spring 2021 Test 1 Student NameДокумент9 страницPhysics 4C0102 Spring 2021 Test 1 Student NameJohn StudentОценок пока нет
- Statics of Rigid BodiesДокумент5 страницStatics of Rigid BodiesUwu WehОценок пока нет
- Theory of Machines FundamentalsДокумент25 страницTheory of Machines FundamentalsMd. Zillur RahmanОценок пока нет
- Structural Control PDFДокумент133 страницыStructural Control PDFChalo RobertsОценок пока нет
- Applied Mathematical Modelling: Mahesh Prakash, Paul W. ClearyДокумент15 страницApplied Mathematical Modelling: Mahesh Prakash, Paul W. ClearyDeepak Kumar SinghОценок пока нет
- SN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Документ11 страницSN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Hamati RamiОценок пока нет
- Ideal Gas Sol3Документ10 страницIdeal Gas Sol3WesNamtrow100% (3)
- Steel Design: Bending Stresses and Plastic Moment of BeamsДокумент7 страницSteel Design: Bending Stresses and Plastic Moment of BeamsYousif alhassankoОценок пока нет