Вам также может понравиться
- SchedulingДокумент47 страницSchedulingwanghechen0076174Оценок пока нет
- Manufacturing System Flow Analysis: Ron@sie - Arizona.eduДокумент30 страницManufacturing System Flow Analysis: Ron@sie - Arizona.edujaga_desh86Оценок пока нет
- Unit 3 - Scheduling in High-Level Synthesis: Week 2 AssignmentДокумент3 страницыUnit 3 - Scheduling in High-Level Synthesis: Week 2 AssignmentpankajmudgilОценок пока нет
- 10 CH 17 SchedulingДокумент48 страниц10 CH 17 SchedulingDarsh MenonОценок пока нет
- SchedulingДокумент49 страницSchedulingjohanna shaanyenengeОценок пока нет
- MIP-based Procedure To Pushback Selection: Enrique Jélvez, Nelson MoralesДокумент8 страницMIP-based Procedure To Pushback Selection: Enrique Jélvez, Nelson MoralesSoporte CGeoMinОценок пока нет
- paper-OPTIMAL PRIORITY ASSIGNMENT AND FEASIBILITY OF STATIC PRIORITY TASKS WITH ARBITRARY START TIMES-5Документ31 страницаpaper-OPTIMAL PRIORITY ASSIGNMENT AND FEASIBILITY OF STATIC PRIORITY TASKS WITH ARBITRARY START TIMES-5Miguel GallardoОценок пока нет
- Design Casing AdvancedДокумент50 страницDesign Casing Advancednguyenhuutruong10025% (4)
- Expert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianДокумент10 страницExpert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianImane TorbiОценок пока нет
- Production SchedulingДокумент15 страницProduction SchedulingAmi AluminiumОценок пока нет
- Khalouli 2008Документ6 страницKhalouli 2008Nabli ZouhourОценок пока нет
- Construction: Prefabricated Steel Bridge Systems: Final ReportДокумент14 страницConstruction: Prefabricated Steel Bridge Systems: Final ReportNicholas FeatherstonОценок пока нет
- Analysis of AlgorithmsДокумент13 страницAnalysis of AlgorithmsShayan AhmedОценок пока нет
- Well TestingДокумент169 страницWell TestingKalou BoniОценок пока нет
- Explanation-Based Repair Techniques For Solving Dynamic Scheduling ProblemsДокумент2 страницыExplanation-Based Repair Techniques For Solving Dynamic Scheduling Problemsppkppk7890Оценок пока нет
- An Optimization Procedure For Truss Structures With Discrete Design Variables and Dynamic ConstraintsДокумент8 страницAn Optimization Procedure For Truss Structures With Discrete Design Variables and Dynamic ConstraintsXuân Thắng LêОценок пока нет
- 15 Japan2012 David Gosman LESДокумент28 страниц15 Japan2012 David Gosman LESfahrgeruste3961Оценок пока нет
- Module-3 Chapter 2Документ39 страницModule-3 Chapter 2IM AM INEVITABLEОценок пока нет
- A Competitive Heuristic Solution Technique For Resource-Constrained Project SchedulingДокумент17 страницA Competitive Heuristic Solution Technique For Resource-Constrained Project SchedulingNicky AndrianОценок пока нет
- Tensor Decomp PresentationДокумент9 страницTensor Decomp PresentationMahbod (Matt) OLFATОценок пока нет
- Pso PPT FДокумент30 страницPso PPT FSasmita moharanaОценок пока нет
- A Bayesian Framework For Optimal MotionДокумент8 страницA Bayesian Framework For Optimal MotionRamon Alejandro QuinterosОценок пока нет
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriДокумент41 страницаConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerОценок пока нет
- DOE BasicsДокумент61 страницаDOE BasicsVikram Gobbi0% (1)
- 5 R 1 Montecarlo SamplingДокумент8 страниц5 R 1 Montecarlo SamplingAleksandar SpasojevicОценок пока нет
- Design of Engineering Experiments Part 3 - The Blocking Principle The Blocking PrincipleДокумент5 страницDesign of Engineering Experiments Part 3 - The Blocking Principle The Blocking PrincipleEnio BrogniОценок пока нет
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Документ55 страницConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamОценок пока нет
- Panel Caving Scheduling Under Precedence Constraints Considering Mining SystemДокумент17 страницPanel Caving Scheduling Under Precedence Constraints Considering Mining SystemJose ChambillaОценок пока нет
- Introduction To Real Time Systems: Hard RT Systems Soft RT SystemsДокумент6 страницIntroduction To Real Time Systems: Hard RT Systems Soft RT Systemsvinod kapateОценок пока нет
- CP PDFДокумент78 страницCP PDFederazzaОценок пока нет
- An Exact Method For Robust Capacity Requirements Planning: Daisuke Morita and Haruhiko SuwaДокумент6 страницAn Exact Method For Robust Capacity Requirements Planning: Daisuke Morita and Haruhiko SuwaulyashofiyyahОценок пока нет
- What Can Go Wrong in Comminution Circuit DesignДокумент7 страницWhat Can Go Wrong in Comminution Circuit DesignMarionОценок пока нет
- A Sliding Time Window Heuristic For Open Pit Mine Block SequencingДокумент14 страницA Sliding Time Window Heuristic For Open Pit Mine Block SequencingronaldОценок пока нет
- Computers & Operations Research: Su Nguyen, Mengjie Zhang, Mark Johnston, Kay Chen TanДокумент11 страницComputers & Operations Research: Su Nguyen, Mengjie Zhang, Mark Johnston, Kay Chen TanImane TorbiОценок пока нет
- Expert Systems With Applications: Ruey-Maw ChenДокумент10 страницExpert Systems With Applications: Ruey-Maw ChenJuan Sebastián Poveda GulfoОценок пока нет
- What Can Go Wrong in Comminution Circuit DesignДокумент8 страницWhat Can Go Wrong in Comminution Circuit DesignAdilene LaresОценок пока нет
- Scheduling Jobs With Values Exponentially Deteriorating Over Time in A Job Shop EnvironmentДокумент6 страницScheduling Jobs With Values Exponentially Deteriorating Over Time in A Job Shop EnvironmentDavid ValleОценок пока нет
- Lecture 3Документ32 страницыLecture 3Inzamam Ul HaqОценок пока нет
- O Q V C D R L: Ptimizing Uantum Ariational Ircuits With EEP Einforcement EarningДокумент8 страницO Q V C D R L: Ptimizing Uantum Ariational Ircuits With EEP Einforcement EarninghaptakОценок пока нет
- Sistemas de ProduccionДокумент19 страницSistemas de ProduccionMilton LeónОценок пока нет
- Unit IvДокумент92 страницыUnit Ivmdsamiurrahaman04Оценок пока нет
- European Journal of Operational Research: Jin-Kao Hao, Una BenlicДокумент9 страницEuropean Journal of Operational Research: Jin-Kao Hao, Una BenlicmiftahОценок пока нет
- Robust Process Capability Index Tracking For Process QualificationДокумент5 страницRobust Process Capability Index Tracking For Process QualificationDrMohamed MansourОценок пока нет
- Lecture 9Документ31 страницаLecture 9yuzlubahadirОценок пока нет
- Pressure Buildup and Horner PlotДокумент46 страницPressure Buildup and Horner PlotKAORU AmaneОценок пока нет
- MJNMG - A2015 Alexander SSDBS y BSO2!Документ12 страницMJNMG - A2015 Alexander SSDBS y BSO2!Soporte CGeoMinОценок пока нет
- Gaussian Basis Sets: CHEM6085: Density Functional TheoryДокумент21 страницаGaussian Basis Sets: CHEM6085: Density Functional TheoryThiago MenzonattoОценок пока нет
- Cocomo SectionДокумент2 страницыCocomo SectionPrince LokaОценок пока нет
- Daa Lab SampleДокумент79 страницDaa Lab SampleShiva TejОценок пока нет
- Week2 6Документ7 страницWeek2 6api-3705606Оценок пока нет
- Design Optimization: Assistant Professor: Dr. Daniel NeufeldДокумент29 страницDesign Optimization: Assistant Professor: Dr. Daniel NeufeldDaniel NeufeldОценок пока нет
- CE474 Lecture12 14DEC20Документ20 страницCE474 Lecture12 14DEC20Umer AnwarОценок пока нет
- Principles of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsДокумент29 страницPrinciples of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsratjerryОценок пока нет
- Paper 17Документ15 страницPaper 17Anonymous dUm1NHVОценок пока нет
- ASQ Process Capbility Overview Mar 10Документ66 страницASQ Process Capbility Overview Mar 10MuthuswamyОценок пока нет
- Constraint Satisfaction Problems: Foundations of Artificial IntelligenceДокумент62 страницыConstraint Satisfaction Problems: Foundations of Artificial Intelligence林佳緯Оценок пока нет
- Continuous Mathematical Formulation For The Open Pit Mine Planning ProblemДокумент1 страницаContinuous Mathematical Formulation For The Open Pit Mine Planning ProblemmkmsdkОценок пока нет
- Process Capability Evaluation - Looking Beyond The ObviousДокумент12 страницProcess Capability Evaluation - Looking Beyond The Obviousravi7447Оценок пока нет
- David Roylance - Mechanics of MaterialsДокумент357 страницDavid Roylance - Mechanics of MaterialsHezi HilikОценок пока нет
- Resolução Do Capítulo 4 - Equilíbrio de Corpos Rígidos PDFДокумент231 страницаResolução Do Capítulo 4 - Equilíbrio de Corpos Rígidos PDFMalik PassosОценок пока нет
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFДокумент12 страницThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwОценок пока нет
- AssessmentsДокумент10 страницAssessmentsapi-296561432Оценок пока нет
- Frequency Distribution Table GraphДокумент10 страницFrequency Distribution Table GraphHannah ArañaОценок пока нет
- Solved Problems - Continuous Random VariablesДокумент4 страницыSolved Problems - Continuous Random VariablesDahanyakage WickramathungaОценок пока нет
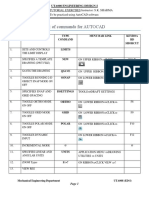
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareДокумент15 страницList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelОценок пока нет
- Final Quiz 2 4Документ4 страницыFinal Quiz 2 4Erick GarciaОценок пока нет
- Standard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Документ22 страницыStandard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Frenzy BritoОценок пока нет
- RM 4Документ37 страницRM 4RHEALYN GEMOTOОценок пока нет
- Data Structures Algorithms and Applications in C by Sartraj SahaniДокумент826 страницData Structures Algorithms and Applications in C by Sartraj SahaniMohammed Nassf100% (1)
- Introduction To Vectors in C++ Word PDFДокумент3 страницыIntroduction To Vectors in C++ Word PDFKarima BabaОценок пока нет
- Project in Algebra 3rd Grading ProblemsДокумент77 страницProject in Algebra 3rd Grading Problemsazisah azisОценок пока нет
- Quant Checklist 132 PDF 2022 by Aashish AroraДокумент70 страницQuant Checklist 132 PDF 2022 by Aashish AroraRajnish SharmaОценок пока нет
- I. Objectives: S10FE-llg-50Документ10 страницI. Objectives: S10FE-llg-50John Loreto MentesОценок пока нет
- Vent SizingДокумент13 страницVent SizingClarence AG Yue100% (1)
- Newsletter April 3-7Документ1 страницаNewsletter April 3-7api-245696657Оценок пока нет
- The Undiscovered Self - Carl Gustav JungДокумент25 страницThe Undiscovered Self - Carl Gustav JungYusuf IrawanОценок пока нет
- Abstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young PadawansДокумент4 страницыAbstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young Padawanssridevishinas100% (1)
- Liceo de Pulilan CollegesДокумент2 страницыLiceo de Pulilan Collegesjv_cindyОценок пока нет
- PyBaMM PaperДокумент9 страницPyBaMM PapervishnuОценок пока нет
- Calculate The Gradients of The Following Linear Graphs. Remember, GradientДокумент10 страницCalculate The Gradients of The Following Linear Graphs. Remember, GradientSuman JoyОценок пока нет
- Fundamentals of Neural NetworksДокумент62 страницыFundamentals of Neural NetworksDivya Aseeja100% (2)
- Elbow MethodДокумент18 страницElbow MethodOsmar SalvadorОценок пока нет
- Eu 2Документ15 страницEu 2Ayush BhadauriaОценок пока нет
- A Meta-Analysis of Research On Sensory Integration TreatmentДокумент10 страницA Meta-Analysis of Research On Sensory Integration TreatmentPaula CelsieОценок пока нет
- Phase Difference & Phase RelationshipsДокумент24 страницыPhase Difference & Phase RelationshipsGabriel Carl AlpuertoОценок пока нет
- Chapter 1 Assignment What Is Statistics?Документ2 страницыChapter 1 Assignment What Is Statistics?mimoОценок пока нет
- DatalabДокумент5 страницDatalabjackОценок пока нет
- Iso/ts 6336-20:2017 (E)Документ5 страницIso/ts 6336-20:2017 (E)Anirban DasОценок пока нет