Вам также может понравиться
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsОт EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsРейтинг: 3.5 из 5 звезд3.5/5 (6)
- MIL STD 1553 OverviewДокумент54 страницыMIL STD 1553 OverviewshyamsundarsrОценок пока нет
- CoPilot GettingStartedДокумент533 страницыCoPilot GettingStartedSibin K MathewОценок пока нет
- Avionics Questions AnswersДокумент26 страницAvionics Questions AnswersSudhakar Seeman100% (2)
- MIL-STD-1553 Physical Layer ForДокумент35 страницMIL-STD-1553 Physical Layer ForELEANDRO MARQUESОценок пока нет
- MIL-STD-1553 Tutorial and ReferenceДокумент22 страницыMIL-STD-1553 Tutorial and ReferenceA. VillaОценок пока нет
- (Military and Aerospace Electronics Europe - Feb-Mar 2006) (2006)Документ36 страниц(Military and Aerospace Electronics Europe - Feb-Mar 2006) (2006)Balaji HimakarОценок пока нет
- Mil HDBK 1553Документ678 страницMil HDBK 1553Lyster100% (1)
- Micro InterfacingДокумент15 страницMicro InterfacingDeepesh KhanejaОценок пока нет
- AE6701 - Avionics NotesДокумент83 страницыAE6701 - Avionics Notesparantn100% (1)
- Introduction To Automotive NetworksДокумент48 страницIntroduction To Automotive NetworksysfplaneОценок пока нет
- TSO-C153 IMA Hardware ElementДокумент113 страницTSO-C153 IMA Hardware ElementNasr PooyaОценок пока нет
- Optical Fiber BasicДокумент48 страницOptical Fiber BasicAntariksha Singh100% (1)
- SCADA-Networking Protocol For Data ExchangeДокумент83 страницыSCADA-Networking Protocol For Data ExchangeRaja RamОценок пока нет
- OSS-RC 3G EricssonДокумент28 страницOSS-RC 3G EricssonJunrevol Wicaksana Putra100% (2)
- LTE Overview TitusДокумент41 страницаLTE Overview TitusVepur SrikanthОценок пока нет
- 3rd Generation Systems: - Review of Cellular Wireless Networks - UmtsДокумент39 страниц3rd Generation Systems: - Review of Cellular Wireless Networks - Umtsselvadpm5Оценок пока нет
- Can BusДокумент19 страницCan BusVipin JainОценок пока нет
- 02 - Monics 10.5 SP1 Introduction To Monics and SAT-DSPДокумент28 страниц02 - Monics 10.5 SP1 Introduction To Monics and SAT-DSPJulio CezarОценок пока нет
- Public Switched Telephone Network (PSTN) BY M C KoladiyaДокумент48 страницPublic Switched Telephone Network (PSTN) BY M C KoladiyaKrishna ChaitanyaОценок пока нет
- System Architecture Evolution (SAE) in 3GPPДокумент24 страницыSystem Architecture Evolution (SAE) in 3GPPSamsher SinghОценок пока нет
- SDH Transport SystemsДокумент185 страницSDH Transport SystemsParijatBanerjeeОценок пока нет
- Drive Test Nemo 2Документ74 страницыDrive Test Nemo 2Tarek GARAОценок пока нет
- SDH CompleteДокумент118 страницSDH CompletePrashant SrivastavaОценок пока нет
- LTE - Long Term Evolution: Technical SeminarДокумент41 страницаLTE - Long Term Evolution: Technical SeminarMohammed Babar AhmedОценок пока нет
- 1st OptmДокумент57 страниц1st OptmMaximo Eduardo Santiago NairaОценок пока нет
- Eric Ssion 10Документ40 страницEric Ssion 10grksudОценок пока нет
- Presentation: OF Base Station System (BSS)Документ30 страницPresentation: OF Base Station System (BSS)wakeonlanОценок пока нет
- Public Switched Telephone Network (PSTN II/II)Документ39 страницPublic Switched Telephone Network (PSTN II/II)svkg93Оценок пока нет
- Cdma 150329003826 Conversion Gate01Документ34 страницыCdma 150329003826 Conversion Gate01judesahayarajОценок пока нет
- JDSU SmartClass E1 Data Ds Acc TM AeДокумент4 страницыJDSU SmartClass E1 Data Ds Acc TM AeAghil Ghiasvand MkhОценок пока нет
- GSM System EssentialsДокумент45 страницGSM System EssentialsDavidDavidОценок пока нет
- Lecture - 29 Industrial Control PDFДокумент27 страницLecture - 29 Industrial Control PDF287 JatinОценок пока нет
- Data Transmission and ModemsДокумент31 страницаData Transmission and ModemsSandip LulekarОценок пока нет
- Ieee 802.15Документ80 страницIeee 802.15Inti YacelgaОценок пока нет
- Jdsu SmartclassДокумент4 страницыJdsu SmartclassEfrain CahuanaОценок пока нет
- Wireless Lan: Mobile Computing Winter 2005 / 2006Документ25 страницWireless Lan: Mobile Computing Winter 2005 / 2006Carlos J Pinzon OОценок пока нет
- Cdma2000-Walsh CodeДокумент49 страницCdma2000-Walsh Codekareemece2007_nsnОценок пока нет
- Lecture12 LTE PDFДокумент80 страницLecture12 LTE PDFKhatri JitendraОценок пока нет
- 5ess Overview: by NGN Faculty ALTTC, GhaziabadДокумент25 страниц5ess Overview: by NGN Faculty ALTTC, GhaziabadMukesh Kumar KurdiyaОценок пока нет
- Dspace 1103Документ8 страницDspace 1103TimoMarxОценок пока нет
- LTE Data Rate CalculationДокумент72 страницыLTE Data Rate Calculationarslan arifОценок пока нет
- Micro InterfacingДокумент31 страницаMicro InterfacingVinod KumarОценок пока нет
- 0.4-4 GHZ MIMO Development Lab MIM04Документ4 страницы0.4-4 GHZ MIMO Development Lab MIM04Amit SharmaОценок пока нет
- Global System For MobilesДокумент97 страницGlobal System For Mobilesati_jaballaОценок пока нет
- Datasheet PDFДокумент213 страницDatasheet PDFRoshan PradhanОценок пока нет
- Comtech/EFData CDD880 Data SheetДокумент2 страницыComtech/EFData CDD880 Data SheetarzeszutОценок пока нет
- l3 - Part 2 - Computer Buses - v22Документ35 страницl3 - Part 2 - Computer Buses - v22Pham Xuan ThuyОценок пока нет
- T7230A Primary Access Framer/Controller: FeaturesДокумент8 страницT7230A Primary Access Framer/Controller: FeaturesjulieОценок пока нет
- Implementation Issues For Channel Estimation and Detection Algorithms For W-CDMAДокумент41 страницаImplementation Issues For Channel Estimation and Detection Algorithms For W-CDMASignum FunctionОценок пока нет
- Data Communication Concepts: - Code - Transmission - Signal - Modulation - ServiceДокумент27 страницData Communication Concepts: - Code - Transmission - Signal - Modulation - ServiceRohit YadavОценок пока нет
- DR Shahedur Rahman: Computer Networks, Wireless and Mobile CommunicationsДокумент36 страницDR Shahedur Rahman: Computer Networks, Wireless and Mobile CommunicationsdkhanОценок пока нет
- Mobile Ad Hoc Network: Prepared byДокумент22 страницыMobile Ad Hoc Network: Prepared byMILANОценок пока нет
- IS-54 Dan IS-136Документ29 страницIS-54 Dan IS-136hasbiiie100% (1)
- Telecommunication Training Lab Ver 5 - 4Документ20 страницTelecommunication Training Lab Ver 5 - 4Luis BatistaОценок пока нет
- Cdma2000-1x Ev DoДокумент74 страницыCdma2000-1x Ev DoEng. Shuaib IbrahimОценок пока нет
- Sikomber Protokol Management JaringanДокумент83 страницыSikomber Protokol Management JaringanIwan S SantosoОценок пока нет
- MPC - Unit 1Документ60 страницMPC - Unit 1Janarish Saju CОценок пока нет
- Lec 6Документ42 страницыLec 6Ahmed GamalОценок пока нет
- Chapter 2 DAQ and Instrument AutomationДокумент54 страницыChapter 2 DAQ and Instrument AutomationTsion NigussieОценок пока нет
- Introduction To Blue Tooth NetworkingДокумент47 страницIntroduction To Blue Tooth NetworkingSagarBenaniОценок пока нет
- Military Satellite Modem: C4I Satellite CommunicationsДокумент2 страницыMilitary Satellite Modem: C4I Satellite Communicationstiti2006Оценок пока нет
- Catalog MasterLogic-200 Eng R02Документ46 страницCatalog MasterLogic-200 Eng R02Marky SpicerОценок пока нет
- Tabela de Faut Code GSM PortuguesДокумент17 страницTabela de Faut Code GSM PortuguesJefferson MotaОценок пока нет
- Web Technology 7-URLДокумент1 страницаWeb Technology 7-URLiwc2008007Оценок пока нет
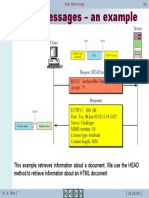
- Web Technology 9-HTTP - ExampleДокумент1 страницаWeb Technology 9-HTTP - Exampleiwc2008007Оценок пока нет
- Web Technology 6-HyperText Transfer ProtocolДокумент1 страницаWeb Technology 6-HyperText Transfer Protocoliwc2008007Оценок пока нет
- Web Technology 8-URL - ContinuedДокумент1 страницаWeb Technology 8-URL - Continuediwc2008007Оценок пока нет
- Web Technology 14-HTTP - Message Format (Status Code)Документ1 страницаWeb Technology 14-HTTP - Message Format (Status Code)iwc2008007Оценок пока нет
- Web Technology 25-Persistent and Nonpersistent ConnectionsДокумент1 страницаWeb Technology 25-Persistent and Nonpersistent Connectionsiwc2008007Оценок пока нет
- Web Technology 19-HTTP - Message FormatДокумент1 страницаWeb Technology 19-HTTP - Message Formatiwc2008007Оценок пока нет
- Web-Technology 19 PDFДокумент1 страницаWeb-Technology 19 PDFiwc2008007Оценок пока нет
- Web Technology 27 Why Web Caching?Документ1 страницаWeb Technology 27 Why Web Caching?iwc2008007Оценок пока нет
- Web-Technology 26 PDFДокумент1 страницаWeb-Technology 26 PDFiwc2008007Оценок пока нет
- Web-Technology 24 PDFДокумент1 страницаWeb-Technology 24 PDFiwc2008007Оценок пока нет
- Web-Technology 20 PDFДокумент1 страницаWeb-Technology 20 PDFiwc2008007Оценок пока нет
- Web-Technology 21 PDFДокумент1 страницаWeb-Technology 21 PDFiwc2008007Оценок пока нет
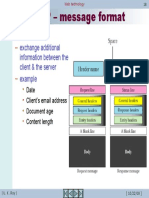
- Headers: Exchange Additional Information Between The Client & The Server ExampleДокумент1 страницаHeaders: Exchange Additional Information Between The Client & The Server Exampleiwc2008007Оценок пока нет
- Web-Technology 13 PDFДокумент1 страницаWeb-Technology 13 PDFiwc2008007Оценок пока нет
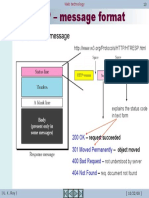
- (Status Code) : Informational Redirectional Successful RequestДокумент1 страница(Status Code) : Informational Redirectional Successful Requestiwc2008007Оценок пока нет
- Web-Technology 11 PDFДокумент1 страницаWeb-Technology 11 PDFiwc2008007Оценок пока нет
- An Address of The Web Page or Other Information On The Internet ExampleДокумент1 страницаAn Address of The Web Page or Other Information On The Internet Exampleiwc2008007Оценок пока нет
- Web-Technology 8 PDFДокумент1 страницаWeb-Technology 8 PDFiwc2008007Оценок пока нет
- Web-Technology 4 PDFДокумент1 страницаWeb-Technology 4 PDFiwc2008007Оценок пока нет
- Qdoc - Tips Ae2401 Avionics Anna University Question BankДокумент14 страницQdoc - Tips Ae2401 Avionics Anna University Question BankTharunkumaar G SОценок пока нет
- T3DSO3504 - T3dso3000datasheetДокумент20 страницT3DSO3504 - T3dso3000datasheetHuy ĐỗОценок пока нет
- Raychem: MIL-STD-1553B Data Bus MicrocouplersДокумент11 страницRaychem: MIL-STD-1553B Data Bus MicrocouplersVolkan SezginОценок пока нет
- HI-2579, HI-2581: 3.3V MIL-STD-1553/1760 Dual Transceiver With Low Profile Integrated TransformersДокумент14 страницHI-2579, HI-2581: 3.3V MIL-STD-1553/1760 Dual Transceiver With Low Profile Integrated TransformersPradeep KumarОценок пока нет
- Capabilities: WWW Flightdata AeroДокумент2 страницыCapabilities: WWW Flightdata AeroyulianОценок пока нет
- MIL-STD-1553 / MIL-STD-1760 3.3V Single Transceiver: Description Pin Configurations Pin ConfigurationsДокумент11 страницMIL-STD-1553 / MIL-STD-1760 3.3V Single Transceiver: Description Pin Configurations Pin ConfigurationsPradeep KumarОценок пока нет
- Miniature Advanced Communication Engine (Mini-Ace) and Mini-Ace PlusДокумент13 страницMiniature Advanced Communication Engine (Mini-Ace) and Mini-Ace Plusgotcha75Оценок пока нет
- Bus ControllerДокумент26 страницBus ControllerMihai Alexandru OlaruОценок пока нет
- VPX3 611 DO 254 Certifiable IO Module Product SheetДокумент6 страницVPX3 611 DO 254 Certifiable IO Module Product SheetAditya SrivatsavОценок пока нет
- Mil-Std-1553 Tutorial WP Gft711aДокумент38 страницMil-Std-1553 Tutorial WP Gft711aCourtney DavisОценок пока нет
- E GC8181 GДокумент16 страницE GC8181 GDeepa DevarajОценок пока нет
- Coupler-Cable Connections - RevAДокумент1 страницаCoupler-Cable Connections - RevABhaskarОценок пока нет
- Part-A Short Questions and Answers (Module-I)Документ22 страницыPart-A Short Questions and Answers (Module-I)Harsha HarОценок пока нет
- Alta eNET 1553Документ2 страницыAlta eNET 1553AlexОценок пока нет
- 7724C3864 DrawingДокумент1 страница7724C3864 DrawingSuresh varma AkulaОценок пока нет
- Onboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureДокумент42 страницыOnboard Data Handling and Telemetry: Lesson 2: The Complete Cdhs ArchitectureDavid Diaz RivasОценок пока нет
- Lecture Notes - Spacecraft Technology (AE3534) : 1 Part 1 - Command & Data HandlingДокумент41 страницаLecture Notes - Spacecraft Technology (AE3534) : 1 Part 1 - Command & Data Handlingشعاع الخيرОценок пока нет
- RAD750 SpaceVPX - DsДокумент2 страницыRAD750 SpaceVPX - DsHugo MartínsОценок пока нет
- Avionics Bus - DA - CPДокумент25 страницAvionics Bus - DA - CPM S PrasadОценок пока нет
- ARINC 429 Data Bus Analyzer: ManualДокумент82 страницыARINC 429 Data Bus Analyzer: ManualPiero RamírezОценок пока нет
- MILSTD - 1553B - Paras KALДокумент22 страницыMILSTD - 1553B - Paras KALbrain stomeОценок пока нет