Вам также может понравиться
- Slide 2 Discrete Time SignalsДокумент100 страницSlide 2 Discrete Time SignalsmusaОценок пока нет
- LS102: Linear Time-Invariant SystemsДокумент8 страницLS102: Linear Time-Invariant SystemsBayar JargalОценок пока нет
- Lab 4Документ15 страницLab 4Aliqpsk AlasadyОценок пока нет
- Anand Institute Digital Signal Processing QuestionsДокумент30 страницAnand Institute Digital Signal Processing QuestionsRavi RajОценок пока нет
- Amplitude ModulationДокумент92 страницыAmplitude ModulationjjaazzmmОценок пока нет
- L12 Voltage Transfer Characteristic, BJT Biasing 1Документ17 страницL12 Voltage Transfer Characteristic, BJT Biasing 1de_stanszaОценок пока нет
- Unit Step Function in MatlabДокумент6 страницUnit Step Function in Matlabshaista005100% (3)
- Inverse Z TransformДокумент12 страницInverse Z TransformArif HassanОценок пока нет
- Assignment 1Документ5 страницAssignment 1Saarthi SoodОценок пока нет
- Impulse Response of A LTI SystemДокумент7 страницImpulse Response of A LTI SystemEysha qureshiОценок пока нет
- Excel Review Center ECE Refresher/Coaching Estth1Документ4 страницыExcel Review Center ECE Refresher/Coaching Estth1Danica Luisa GazaaОценок пока нет
- Week 6 - Z-TransformДокумент15 страницWeek 6 - Z-TransformRalph Ian CaingcoyОценок пока нет
- Band Stop FilterДокумент3 страницыBand Stop FilterebasaytunoОценок пока нет
- LESSON 1 Signal Manipulation Edited W o AnswerДокумент29 страницLESSON 1 Signal Manipulation Edited W o AnswerVia Marie Mesa100% (1)
- Miller EffectДокумент8 страницMiller EffectAlexandErHenríquezОценок пока нет
- The Z-Transform: Discrete Time Counterpart of Laplace TransformДокумент119 страницThe Z-Transform: Discrete Time Counterpart of Laplace Transformsk abdullahОценок пока нет
- Z TransformДокумент59 страницZ TransformtemkimleangОценок пока нет
- Introduction To ElectrostaticsДокумент38 страницIntroduction To ElectrostaticsRamon Lopez Lapiña100% (1)
- DSP Lab ManualДокумент67 страницDSP Lab Manualloststranger990100% (1)
- Chapter 4:jfet: Junction Field Effect TransistorДокумент68 страницChapter 4:jfet: Junction Field Effect TransistorelectricKKTMОценок пока нет
- ElectromagneticsДокумент10 страницElectromagneticsLencie Dela CruzОценок пока нет
- IV Characteristic TransistorДокумент7 страницIV Characteristic TransistorNida RidzuanОценок пока нет
- A Simple Laplace Transform Is Conducted While Sending Signals Over Any TwoДокумент2 страницыA Simple Laplace Transform Is Conducted While Sending Signals Over Any TwohamryОценок пока нет
- Lecture Notes in Transmission Media and Antenna Systems: Mapua Institute of Technology School of EeceДокумент115 страницLecture Notes in Transmission Media and Antenna Systems: Mapua Institute of Technology School of EecejobertОценок пока нет
- Signals Spectra Processing PowerPoint PresentationДокумент8 страницSignals Spectra Processing PowerPoint PresentationJohn Francis DizonОценок пока нет
- Lecture 14, 15 StabilityДокумент45 страницLecture 14, 15 StabilityHamza KhanОценок пока нет
- Discrete Time Systems Discrete Time Systems & Difference EquationsДокумент44 страницыDiscrete Time Systems Discrete Time Systems & Difference EquationsRonald GeorgeОценок пока нет
- True FalseДокумент5 страницTrue FalseShuvodip Das50% (2)
- Signal Flow Graph (Diajarkan)Документ57 страницSignal Flow Graph (Diajarkan)Muhammad DienullahОценок пока нет
- Control Systems: Basil HamedДокумент62 страницыControl Systems: Basil HamedHussainОценок пока нет
- Chapter 4 Questions Examples-AdcДокумент5 страницChapter 4 Questions Examples-AdcBenazir BegamОценок пока нет
- Signals, Continuous Time and Discrete TimeДокумент27 страницSignals, Continuous Time and Discrete TimeSukanta ParidaОценок пока нет
- Laplace Transform-Signal ProcessingДокумент41 страницаLaplace Transform-Signal ProcessingstanculeanuОценок пока нет
- Lab 4 Pulse Code ModulationДокумент5 страницLab 4 Pulse Code ModulationARDUINO BOLTОценок пока нет
- Experiment no. 2 Aim: - Theory: c1 (t) = √2/Tb cos 2πƒ1tДокумент6 страницExperiment no. 2 Aim: - Theory: c1 (t) = √2/Tb cos 2πƒ1tMudit GoelОценок пока нет
- Z TransformДокумент29 страницZ TransformRamadhuraiОценок пока нет
- Electronics & Communication Seminar Topic ListДокумент6 страницElectronics & Communication Seminar Topic ListArvind9781843623Оценок пока нет
- ECE411 - Problem Set 1 - IntroductionДокумент7 страницECE411 - Problem Set 1 - IntroductionMartine JimenezОценок пока нет
- 6 Electric Potential and Relationship Between E and V - Maxwell's EquationДокумент25 страниц6 Electric Potential and Relationship Between E and V - Maxwell's EquationMarc RiveraОценок пока нет
- FIR Ece2610 Chap5Документ38 страницFIR Ece2610 Chap5bongo77priestОценок пока нет
- LabSheet Experiments - Giatutinhyeu14 - 2Документ176 страницLabSheet Experiments - Giatutinhyeu14 - 2Nhi OtОценок пока нет
- HW 02Документ8 страницHW 02Sarah Santiago100% (1)
- Batangas State University College of Engineering, Architecture & Fine ArtsДокумент9 страницBatangas State University College of Engineering, Architecture & Fine ArtsAbby gxleОценок пока нет
- Matlab ManualДокумент90 страницMatlab ManualSri Harsha57% (7)
- MicrowaveДокумент119 страницMicrowaveAsif AfridiОценок пока нет
- 2-Lecture Notes Lesson4 4Документ10 страниц2-Lecture Notes Lesson4 4kstu1112Оценок пока нет
- Laboratory Manual: Analogue and Digital Communication LabДокумент18 страницLaboratory Manual: Analogue and Digital Communication LabZain HaiderОценок пока нет
- Fourier TransformДокумент16 страницFourier TransformManish Kumar MouryaОценок пока нет
- Angle Modulation GuideДокумент54 страницыAngle Modulation GuideJan Nicholas TeorimaОценок пока нет
- Laplace and Inverse Laplace TransformДокумент96 страницLaplace and Inverse Laplace Transformgtewszc123Оценок пока нет
- Even and Odd Signals PDFДокумент2 страницыEven and Odd Signals PDFJonathanОценок пока нет
- Activity 03Документ11 страницActivity 03kennethОценок пока нет
- DSP Lectures v2 (Chapter2)Документ32 страницыDSP Lectures v2 (Chapter2)vvvssssvvv100% (1)
- 2 Discrete-Time Signals and Discrete-Time SystemsДокумент29 страниц2 Discrete-Time Signals and Discrete-Time SystemsVeena Divya KrishnappaОценок пока нет
- Digital Signal Processing Eee Fifth by L N Sith SirДокумент55 страницDigital Signal Processing Eee Fifth by L N Sith Sirnikita jagtapОценок пока нет
- Unit-I Review of Discrete Signals and Systems: SignalДокумент26 страницUnit-I Review of Discrete Signals and Systems: SignalRaghuОценок пока нет
- Lecture - 2-1 Digital Signal ProcessДокумент14 страницLecture - 2-1 Digital Signal ProcessSaif AlabdullahОценок пока нет
- DSP 1 Signals and SystemsДокумент73 страницыDSP 1 Signals and SystemsAira Mae CrespoОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Chebyshev PolynomialsДокумент19 страницChebyshev PolynomialssofiavictorОценок пока нет
- Rockwell Scale PDFДокумент5 страницRockwell Scale PDFFortune FireОценок пока нет
- Programming ExercisesДокумент2 страницыProgramming ExercisesDaryl Ivan Empuerto HisolaОценок пока нет
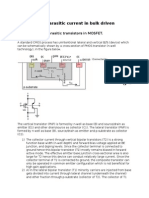
- Bulk Driven MosfetДокумент3 страницыBulk Driven MosfetAyandev BarmanОценок пока нет
- Bagh Bon BondukДокумент105 страницBagh Bon BondukAdnan RahmanОценок пока нет
- M/M/1 Queues With Working Vacations (M/M/1/WV) : L.D. Servi, S.G. FinnДокумент12 страницM/M/1 Queues With Working Vacations (M/M/1/WV) : L.D. Servi, S.G. FinnSadek AlaouiОценок пока нет
- Effect of Degassing and Heat Treatment OnДокумент9 страницEffect of Degassing and Heat Treatment OnSinan YıldızОценок пока нет
- General Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergДокумент196 страницGeneral Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergparonimusОценок пока нет
- S7-1200 SM 1231 8 X Analog Input - SpecДокумент3 страницыS7-1200 SM 1231 8 X Analog Input - Specpryzinha_evОценок пока нет
- TankДокумент24 страницыTankUDayОценок пока нет
- Surveying Section 7Документ14 страницSurveying Section 7Beltran KathОценок пока нет
- Biomechanics and Motor Control of Human Movement - Ch3Документ37 страницBiomechanics and Motor Control of Human Movement - Ch3guillecabezaОценок пока нет
- Off Grid PV SystemДокумент55 страницOff Grid PV SystemlegasuОценок пока нет
- Power System Analysis SlidesДокумент34 страницыPower System Analysis SlidesSamundar Khan100% (2)
- Volumes by Cylindrical ShellsДокумент7 страницVolumes by Cylindrical Shellseomer1968Оценок пока нет
- High Pressure Vessel Thickness CalculationsДокумент11 страницHigh Pressure Vessel Thickness CalculationsShriyash DeshpandeОценок пока нет
- Last Minute Review MCQДокумент34 страницыLast Minute Review MCQIB Experts for 7on7 Pvt. Ltd.Оценок пока нет
- Malla Curricular Ingenieria Civil UNTRMДокумент1 страницаMalla Curricular Ingenieria Civil UNTRMhugo maldonado mendoza50% (2)
- Me VR10 PDFДокумент153 страницыMe VR10 PDFeng ameer alburihyОценок пока нет
- Fundamentals of Surveying - Experiment No. 2Документ6 страницFundamentals of Surveying - Experiment No. 2Jocel SangalangОценок пока нет
- Exp 4 Chem 17 LabДокумент7 страницExp 4 Chem 17 LabGabrielle CatalanОценок пока нет
- O Repensar Da Fonoaudiologia Na Epistemologia CienДокумент5 страницO Repensar Da Fonoaudiologia Na Epistemologia CienClaudilla L.Оценок пока нет
- Huygens' Principle, Maxwell's Displacement CurrentДокумент7 страницHuygens' Principle, Maxwell's Displacement CurrentGalleta Galleta MetralletaОценок пока нет
- WinspireДокумент44 страницыWinspireBhanu PrakashОценок пока нет
- Literature ReviewДокумент17 страницLiterature ReviewSyafiq ShaffiaiОценок пока нет
- SM PDFДокумент607 страницSM PDFGladwin SimendyОценок пока нет
- Cantilever Calculation ToolДокумент10 страницCantilever Calculation ToolEnoch Twumasi50% (2)
- Siesmic Protection Ufc 3 310 04Документ128 страницSiesmic Protection Ufc 3 310 04irastemhemОценок пока нет
- Orbital Velocity Formula - Solved Example With EquationsДокумент5 страницOrbital Velocity Formula - Solved Example With Equationsmohamad magdyОценок пока нет
- Astm 1784Документ4 страницыAstm 1784arifin rizalОценок пока нет