Вам также может понравиться
- Recording 1970 09Документ36 страницRecording 1970 09klepkoj100% (1)
- WaveletFiltering PDFДокумент96 страницWaveletFiltering PDFÁron FehérОценок пока нет
- 01 0167 00 PDFДокумент48 страниц01 0167 00 PDFParty BandОценок пока нет
- Chaos-Based Image Encryption With Salp Swarm Key OptimizationДокумент8 страницChaos-Based Image Encryption With Salp Swarm Key OptimizationEditor IJETBSОценок пока нет
- (Do Not Print) Digital-Electronics PDFДокумент122 страницы(Do Not Print) Digital-Electronics PDFMasaruNakaegawaОценок пока нет
- Researchpaper OFDM Modulator For Wireless LAN WLAN StandardДокумент5 страницResearchpaper OFDM Modulator For Wireless LAN WLAN Standardtsk4b7Оценок пока нет
- Laboratory Exercise 4Документ14 страницLaboratory Exercise 4WalterYesidОценок пока нет
- Audio Mixer PresentationsДокумент25 страницAudio Mixer Presentationsapi-269823096100% (1)
- IIR Filter Design With MATLABДокумент28 страницIIR Filter Design With MATLABdivya1587Оценок пока нет
- DSP Lab Manual PerfectДокумент139 страницDSP Lab Manual PerfectSsgn Srinivasarao50% (2)
- All CodesДокумент28 страницAll CodeskarrarОценок пока нет
- Cid - EttiДокумент380 страницCid - EttiCilibiu Ionuţ-AlinОценок пока нет
- Notch Filter DigitalДокумент43 страницыNotch Filter Digitalanand248Оценок пока нет
- MIMO FundamentalsДокумент34 страницыMIMO FundamentalsAshwani KumarОценок пока нет
- Quartus Tutorial 2 Simulation PDFДокумент25 страницQuartus Tutorial 2 Simulation PDFBill GonzálezОценок пока нет
- Filter Design Guide: Source:, Oct. 14, 2004 Edited by William Rose, 2011Документ17 страницFilter Design Guide: Source:, Oct. 14, 2004 Edited by William Rose, 2011Anonymous pS4LT2GJUSОценок пока нет
- Intel® Galileo Gen 2 Development BoardДокумент2 страницыIntel® Galileo Gen 2 Development BoardalingherghescuОценок пока нет
- Lecture 04 - Signal Space Approach and Gram Schmidt ProcedureДокумент20 страницLecture 04 - Signal Space Approach and Gram Schmidt ProcedureKhoa PhamОценок пока нет
- Enhanced Arnolds Cat Map-AES Encryption Technique For Medical ImagesДокумент8 страницEnhanced Arnolds Cat Map-AES Encryption Technique For Medical ImagesVitОценок пока нет
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversДокумент5 страницPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalОценок пока нет
- LOGIC - CIRCUITS Final Exam Q2 2010 - 2011 Problems and Answer KeyДокумент2 страницыLOGIC - CIRCUITS Final Exam Q2 2010 - 2011 Problems and Answer KeySimon Gregory Mabanta100% (1)
- Digital Logic Design: Assignment 1 Due Date: 10.12.2020 (Thursday)Документ3 страницыDigital Logic Design: Assignment 1 Due Date: 10.12.2020 (Thursday)muktikantaОценок пока нет
- Medical Image Encryption Using Multi Chaotic MapsДокумент10 страницMedical Image Encryption Using Multi Chaotic MapsTELKOMNIKAОценок пока нет
- A Tutorial On SISO and MIMO Channel CapacitiesДокумент4 страницыA Tutorial On SISO and MIMO Channel Capacitiesmashkoor86Оценок пока нет
- Turbo CodesДокумент28 страницTurbo CodesPrasant Kumar Barik100% (1)
- Home Automation With Intel Galileo - Sample ChapterДокумент32 страницыHome Automation With Intel Galileo - Sample ChapterPackt PublishingОценок пока нет
- Subject Review: Image Encryption Techniques Based On Chaotic SystemsДокумент6 страницSubject Review: Image Encryption Techniques Based On Chaotic Systemseditor ijeratОценок пока нет
- Automatic Water Level Control and Monito PDFДокумент5 страницAutomatic Water Level Control and Monito PDFobey muchuweniОценок пока нет
- Assignment 1 Digital IC DesignДокумент2 страницыAssignment 1 Digital IC DesignsidhjajОценок пока нет
- Manual ArduinoДокумент15 страницManual ArduinoBalachandraОценок пока нет
- CS 25000 Spring 2017 Final Practice SolutionsДокумент13 страницCS 25000 Spring 2017 Final Practice SolutionsTiger TangОценок пока нет
- Paper 1-Encryption Algorithms For Color Images PDFДокумент11 страницPaper 1-Encryption Algorithms For Color Images PDFSudha SudhaОценок пока нет
- Intel Galileo Release NotesДокумент17 страницIntel Galileo Release NotesdonnoitОценок пока нет
- Wavelet Based Image Authentication and RecoveryДокумент63 страницыWavelet Based Image Authentication and RecoveryPrem KumarОценок пока нет
- A New Chaotic System For Image EncryptionДокумент5 страницA New Chaotic System For Image EncryptionMENANI ZineddineОценок пока нет
- Butterworth FiltersДокумент22 страницыButterworth FiltersShreya MattikalliОценок пока нет
- Laser Communication SystemДокумент4 страницыLaser Communication Systemjose273Оценок пока нет
- Laser Based Communication System PDFДокумент3 страницыLaser Based Communication System PDFPawan Kumar100% (1)
- Exper-10 Digital Comparator CircuitДокумент5 страницExper-10 Digital Comparator CircuitMohammed Dyhia AliОценок пока нет
- Digital Logic Final ExamДокумент3 страницыDigital Logic Final ExamSalih AnwarОценок пока нет
- Automatic Water Level Controller Using Arduino UNO.Документ21 страницаAutomatic Water Level Controller Using Arduino UNO.Harsh ChoudharyОценок пока нет
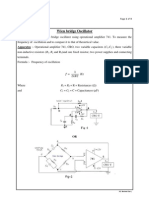
- Wien BridgeДокумент1 страницаWien Bridgekinni_ealaОценок пока нет
- Assignment 1Документ2 страницыAssignment 1kartik0% (1)
- Final Year Matlab Project List With Abstract 2012Документ47 страницFinal Year Matlab Project List With Abstract 2012Mohit SnggОценок пока нет
- Xilinx Fpgas:Evolution and RevolutionДокумент45 страницXilinx Fpgas:Evolution and RevolutionElakkiya Arunagiri100% (1)
- Digital Number Systems 3 AnsДокумент3 страницыDigital Number Systems 3 AnsbhagОценок пока нет
- Image Encryption Using Hyper Chaos and Symmetric CryptographyДокумент7 страницImage Encryption Using Hyper Chaos and Symmetric Cryptographymishranamit2211Оценок пока нет
- Operational Amplifier 741 As Wein Bridge Oscillator 1Документ4 страницыOperational Amplifier 741 As Wein Bridge Oscillator 1Deepak SharmaОценок пока нет
- 2 Wien Bridge OscillatorДокумент1 страница2 Wien Bridge OscillatorcpburkОценок пока нет
- Hcpa-It Q&aДокумент21 страницаHcpa-It Q&aanon_208122252Оценок пока нет
- Indrumar DEPIДокумент134 страницыIndrumar DEPIBianca LoleaОценок пока нет
- Wein Bridge OscillatorДокумент11 страницWein Bridge OscillatorDimas RioОценок пока нет
- W11 Tutorial Solutions Chapter 13Документ5 страницW11 Tutorial Solutions Chapter 13mamnunbd100% (4)
- Lucrarea 5: Filtre LC Proiectate Pe Baza Parametrilor de LucruДокумент7 страницLucrarea 5: Filtre LC Proiectate Pe Baza Parametrilor de LucruMarius DumitruОценок пока нет
- Circuite Integrate DigitaleДокумент511 страницCircuite Integrate DigitaleAlexandra DobreОценок пока нет
- CH 05Документ10 страницCH 05Hari PrasadОценок пока нет
- CH 12Документ14 страницCH 12Pooja RajoriaОценок пока нет
- IIR Digital Filter Structures Filter DesignДокумент35 страницIIR Digital Filter Structures Filter DesignMasterMathematicianОценок пока нет
- DSP-5 (Iir) (S)Документ55 страницDSP-5 (Iir) (S)Jyothi JoОценок пока нет
- Lab Sheet 6 Filter Design Using MATLAB: Lab Session 6.1: Implementation of Linear Phase FIR FilterДокумент15 страницLab Sheet 6 Filter Design Using MATLAB: Lab Session 6.1: Implementation of Linear Phase FIR FilterSharmin RiniОценок пока нет
- Lab.6&7. IIR FiltersДокумент8 страницLab.6&7. IIR FiltershimОценок пока нет
- Some Case Studies on Signal, Audio and Image Processing Using MatlabОт EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabОценок пока нет
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОт EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОценок пока нет
- Achieve Paramount Cloud Security May2015 TCJuly2015Документ27 страницAchieve Paramount Cloud Security May2015 TCJuly2015Siddarth MadanОценок пока нет
- Sqa 2 Marks With AnswersДокумент18 страницSqa 2 Marks With AnswerspavithrasubburajОценок пока нет
- Standardized CVДокумент2 страницыStandardized CVSiddarth MadanОценок пока нет
- Cloud Computing Era PracticeДокумент75 страницCloud Computing Era PracticeSiddarth MadanОценок пока нет
- Web ServicesДокумент2 страницыWeb ServicesSiddarth MadanОценок пока нет
- 1 Finite WordlengthДокумент26 страниц1 Finite WordlengthKalpak ShahaneОценок пока нет
- Cloud Computing Era PracticeДокумент75 страницCloud Computing Era PracticeSiddarth MadanОценок пока нет
- Lecture 17Документ85 страницLecture 17Siddarth MadanОценок пока нет
- HillДокумент27 страницHillSiddarth MadanОценок пока нет
- FirewallsДокумент53 страницыFirewallsRichard PrinceОценок пока нет
- CHAPTER 2 Discrete Fourier TransformДокумент75 страницCHAPTER 2 Discrete Fourier TransformSiddarth MadanОценок пока нет
- Reverse EngineeringДокумент942 страницыReverse EngineeringGate TopperОценок пока нет
- CH 02Документ39 страницCH 02Eli PriyatnaОценок пока нет
- Sri Venkateswara College of Engineering Department of Cse Ericsson - SVCE INTERNSHIP 2014 Daily ReportДокумент1 страницаSri Venkateswara College of Engineering Department of Cse Ericsson - SVCE INTERNSHIP 2014 Daily ReportSiddarth MadanОценок пока нет
- MA2111 Rejinpaul - Com Important QuestionsДокумент2 страницыMA2111 Rejinpaul - Com Important QuestionsSiddarth MadanОценок пока нет
- Transport ProtocolsДокумент18 страницTransport ProtocolsshrikoolОценок пока нет
- Memory CacheДокумент96 страницMemory CacheTamanekoОценок пока нет
- CS2357 VVQДокумент10 страницCS2357 VVQSiddarth MadanОценок пока нет
- Tutorial DAQДокумент26 страницTutorial DAQSiddarth MadanОценок пока нет
- MapReduce: Simplified Data Processing On Large ClustersДокумент13 страницMapReduce: Simplified Data Processing On Large Clusterszzztimbo100% (1)
- s07 Map ReduceДокумент41 страницаs07 Map ReduceSiddarth MadanОценок пока нет
- Useful Notes On MLДокумент9 страницUseful Notes On MLsirneonashОценок пока нет
- Primera BrochureДокумент24 страницыPrimera BrochureSiddarth MadanОценок пока нет
- Se 5thДокумент2 страницыSe 5thSiddarth MadanОценок пока нет
- cs2301 AbДокумент5 страницcs2301 AbGR RaghavОценок пока нет
- Modulus v4 LRДокумент16 страницModulus v4 LRSiddarth MadanОценок пока нет
- Unisys Innovation Labs Application: Your Contact InformationДокумент3 страницыUnisys Innovation Labs Application: Your Contact InformationSiddarth MadanОценок пока нет
- Metalearning - A Tutorial: Christophe Giraud-Carrier December 2008Документ45 страницMetalearning - A Tutorial: Christophe Giraud-Carrier December 2008Siddarth MadanОценок пока нет
- Ferco Arc LRДокумент20 страницFerco Arc LRSiddarth MadanОценок пока нет
- Dip LabДокумент5 страницDip LabAmber SarwarОценок пока нет
- 6W Wooden Indoor Wall Mount Speaker: FeaturesДокумент3 страницы6W Wooden Indoor Wall Mount Speaker: FeaturesThan Htike AungОценок пока нет
- Unit-V Multicarrier Modulation: Data Transmission Using Multiple CarriersДокумент9 страницUnit-V Multicarrier Modulation: Data Transmission Using Multiple CarriersTharun konda100% (1)
- Matlab FileДокумент12 страницMatlab FileBhushan Singh BadgujjarОценок пока нет
- Active Compensation of Op-Amps 1979Документ6 страницActive Compensation of Op-Amps 1979JP ShakespeareОценок пока нет
- OutДокумент353 страницыOutKrishna Kumar GuptaОценок пока нет
- Introduction To Data Acquisition SystemДокумент45 страницIntroduction To Data Acquisition SystemK K BajpaiОценок пока нет
- Signals and Systems Kuestion (EE) PDFДокумент50 страницSignals and Systems Kuestion (EE) PDFlaxmandasriОценок пока нет
- Mad Professor - Snow White Auto WahДокумент3 страницыMad Professor - Snow White Auto WahJong Jin KimОценок пока нет
- Dac and Adc Circuits: Topic OutcomeДокумент9 страницDac and Adc Circuits: Topic OutcomeSegfred NavarroОценок пока нет
- AXP Flextron DC14 PDFДокумент7 страницAXP Flextron DC14 PDFMatteo ValenteОценок пока нет
- Least Mean Square AlgorithmДокумент14 страницLeast Mean Square AlgorithmjaigodaraОценок пока нет
- DC Power Supply With Very Low Noise: Vaclav Papez, Stanislava PapezovaДокумент6 страницDC Power Supply With Very Low Noise: Vaclav Papez, Stanislava PapezovaM.Seddik DOUARОценок пока нет
- Morphology RestorationДокумент41 страницаMorphology RestorationInquisitivoОценок пока нет
- 21 PW1400 FeДокумент2 страницы21 PW1400 Febk1313Оценок пока нет
- SL 4001Документ2 страницыSL 4001Hemil ShahОценок пока нет
- Z TransformДокумент56 страницZ Transformcrux_123Оценок пока нет
- DataPC DX11 AC3 Boston UnderДокумент179 страницDataPC DX11 AC3 Boston UnderOscar David Blanco PereiraОценок пока нет
- ADS Tutorial PDFДокумент246 страницADS Tutorial PDFPavan TОценок пока нет
- Noc19 De04 Assignment Week 12Документ3 страницыNoc19 De04 Assignment Week 12Sweta DashОценок пока нет
- IIR Filter Approximation of An Innovative Digital Audio EqualizerДокумент6 страницIIR Filter Approximation of An Innovative Digital Audio EqualizerAnupriya GhoshОценок пока нет
- Burt 2006Документ8 страницBurt 2006Zhenyu YangОценок пока нет
- Nyquist PlotsДокумент10 страницNyquist PlotsUmy KalsoomОценок пока нет
- DCTДокумент11 страницDCTIlija FilipovicОценок пока нет
- D37000A - 70MHz To 200MHz 2 Channel Digital Storage OscilloscopesДокумент4 страницыD37000A - 70MHz To 200MHz 2 Channel Digital Storage Oscilloscopesnagaraj p sОценок пока нет
- Communication System Lecture 1Документ17 страницCommunication System Lecture 1FahadKhanОценок пока нет