Вам также может понравиться
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionОт EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionОценок пока нет
- Abc To DQДокумент29 страницAbc To DQKarThiОценок пока нет
- DQ TransformationДокумент51 страницаDQ Transformationसुमित नेमा50% (2)
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationОт EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationОценок пока нет
- Modelling of IM Using DQ TransformationДокумент64 страницыModelling of IM Using DQ Transformationdivinelight100% (1)
- DQ Modeling and Dynamic CharacteristicsДокумент9 страницDQ Modeling and Dynamic CharacteristicsNAENWI YAABARIОценок пока нет
- Induction Motor ModelДокумент31 страницаInduction Motor ModelMohammedHaythamОценок пока нет
- TMS320F28335 DSP Programming Using MATLAB Simulink Embedded Coder: Techniques and AdvancementsДокумент7 страницTMS320F28335 DSP Programming Using MATLAB Simulink Embedded Coder: Techniques and AdvancementsSaid MerengueОценок пока нет
- Design and Implementation of FPGA Based Vector Controlled of A Three Phase Induction Motor PDFДокумент158 страницDesign and Implementation of FPGA Based Vector Controlled of A Three Phase Induction Motor PDFRawaz AzizОценок пока нет
- Microsoft Word - Arbitrary Reference Frame TheoryДокумент8 страницMicrosoft Word - Arbitrary Reference Frame Theorysameerpatel157700% (1)
- Modeling and Simulation of SVPWM Based Application: Ashish K. Porwal Ketan M. BariaДокумент35 страницModeling and Simulation of SVPWM Based Application: Ashish K. Porwal Ketan M. BariaAshish PorwalОценок пока нет
- Unit 2 - Assignment ZeroДокумент5 страницUnit 2 - Assignment ZeroRushikesh Kale100% (1)
- Modelling of Induction Motor PDFДокумент42 страницыModelling of Induction Motor PDFsureshОценок пока нет
- First Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHДокумент40 страницFirst Term Assignment CSC 471 Summer-2018: Rihab Rahman, 16103327, CSC 471, Sec-F, MAHAbdur RazzakОценок пока нет
- Chapter - 1: Three Phase SCR Module PEC14HV5PДокумент27 страницChapter - 1: Three Phase SCR Module PEC14HV5Pp.saravanakumarОценок пока нет
- Induction MotorДокумент7 страницInduction MotoruwaifotonyОценок пока нет
- Simulation of Indirect Field-Oriented Induction Motor Drive SystemДокумент12 страницSimulation of Indirect Field-Oriented Induction Motor Drive SystemThinseepОценок пока нет
- BE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversityДокумент15 страницBE-II/IV-Sem-IV Computer Organization Lab Viva Questions With Answers-Osmania UniversitySirisha VamsiОценок пока нет
- 07a70210 NeuralnetworksandfuzzylogicДокумент7 страниц07a70210 NeuralnetworksandfuzzylogicSamiullah MohammedОценок пока нет
- Tesis ABC - DQ0Документ101 страницаTesis ABC - DQ0laloОценок пока нет
- 8085Документ56 страниц8085Kunal MeherОценок пока нет
- Power Electronicsall Five UnitДокумент432 страницыPower Electronicsall Five Unitdj9017354100% (1)
- Thesis Marco RiveraДокумент159 страницThesis Marco RiveraMarco RiveraОценок пока нет
- C5 - Intro To 8085 - Hardware PDFДокумент39 страницC5 - Intro To 8085 - Hardware PDFsiti hajarОценок пока нет
- Introduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadДокумент117 страницIntroduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadEnGr Asad Hayat BanGashОценок пока нет
- Unit 2: 8086 MicroprocessorДокумент34 страницыUnit 2: 8086 MicroprocessorStephanie Cruz100% (1)
- EI2402-Logic and Distributed Control SystemДокумент56 страницEI2402-Logic and Distributed Control SystemJaibhavani SivajiОценок пока нет
- Microprocessor8085 BestДокумент145 страницMicroprocessor8085 BestDebashis TaraiОценок пока нет
- 8255 NewДокумент13 страниц8255 Newmohit mishraОценок пока нет
- Comparison Between Full Order and Minimum Order Observer Controller For DC MotorДокумент6 страницComparison Between Full Order and Minimum Order Observer Controller For DC MotorInternational Journal of Research and DiscoveryОценок пока нет
- Speed Control of Induction MotorДокумент87 страницSpeed Control of Induction MotorAmm Ãr75% (4)
- Park Transformation and Clarke Transformation in DetailДокумент20 страницPark Transformation and Clarke Transformation in DetailKevin Dito GrandhikaОценок пока нет
- Modeling and Analysis of 6 Phase Synchronous MotorДокумент14 страницModeling and Analysis of 6 Phase Synchronous MotorArif IqbalОценок пока нет
- 8085 Lab ManualДокумент58 страниц8085 Lab ManualShah JainamОценок пока нет
- Digital Control Systems: Unit - I Sampling and ReconstructionДокумент4 страницыDigital Control Systems: Unit - I Sampling and Reconstructionvamkrishna33% (3)
- System Theory PDFДокумент19 страницSystem Theory PDFLakshmi Zahara0% (1)
- Induction Motor DrivesДокумент73 страницыInduction Motor DrivesSai Pranahita KulithalaiОценок пока нет
- Thevenins and NortonsДокумент26 страницThevenins and NortonsKishan SinghОценок пока нет
- Microprocessors and Microcontrollers Module 1 - 5Документ260 страницMicroprocessors and Microcontrollers Module 1 - 5ncecentral0% (1)
- Ece I Basic Electronics Engg. (15eln15) NotesДокумент124 страницыEce I Basic Electronics Engg. (15eln15) NotesNikhil KulkarniОценок пока нет
- Block Diagram of 8085Документ32 страницыBlock Diagram of 8085Shabd ShashankОценок пока нет
- Dynamic Modelling of Induction MotorДокумент12 страницDynamic Modelling of Induction Motorvidya_sagar826Оценок пока нет
- EE6502 MPMC UNIT 1-5 (Read-Only)Документ607 страницEE6502 MPMC UNIT 1-5 (Read-Only)Rajasekaran ThangarajuОценок пока нет
- Tms 320 F 28379 DДокумент222 страницыTms 320 F 28379 DJuan Ku LosanoОценок пока нет
- Fuzzy Logic History and ApplicationsДокумент5 страницFuzzy Logic History and ApplicationsYossry AwadОценок пока нет
- Experiments On 8085 MicroprocessorДокумент18 страницExperiments On 8085 MicroprocessorSaumya Mohan100% (1)
- 8085Документ47 страниц8085Govind GuptaОценок пока нет
- EE8552 POWER ELECTRONICS SyllabusДокумент1 страницаEE8552 POWER ELECTRONICS SyllabuscoolrajeeeОценок пока нет
- Introduction To 8085 Microprocessor - Dr.P.YogeshДокумент48 страницIntroduction To 8085 Microprocessor - Dr.P.Yogeshmailmeasdd100% (1)
- Comparison of FOC and DTCДокумент6 страницComparison of FOC and DTCchienbkaОценок пока нет
- r05410201 - Neural Networks & Fuzzy LogicДокумент4 страницыr05410201 - Neural Networks & Fuzzy LogicSRINIVASA RAO GANTA100% (1)
- Part 4 Clark&ParkДокумент47 страницPart 4 Clark&ParkPaneendra KumarОценок пока нет
- Simulation of Symmetrical Induction MachineryДокумент16 страницSimulation of Symmetrical Induction MachineryIfat 'ipeh' FatmawatiОценок пока нет
- Class 2-Introduction To 8085 Microprocessor PDFДокумент46 страницClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalОценок пока нет
- Lecture Notes - MIT - System IdentificationДокумент30 страницLecture Notes - MIT - System IdentificationsabrahimaОценок пока нет
- FCS Lab2Документ36 страницFCS Lab2muhammadОценок пока нет
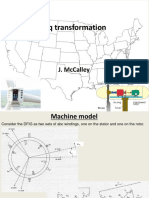
- D-Q Transformation: J. MccalleyДокумент51 страницаD-Q Transformation: J. MccalleyRicardo TironeОценок пока нет
- Induction Machine ModelДокумент7 страницInduction Machine Modelahmed s. NourОценок пока нет
- DQ TransformationДокумент51 страницаDQ TransformationAili LuggymixОценок пока нет
- Cambridge International AS & A Level: PHYSICS 9702/41Документ24 страницыCambridge International AS & A Level: PHYSICS 9702/41with love, alisha.Оценок пока нет
- ACCC Midal Data (European Sizes)Документ23 страницыACCC Midal Data (European Sizes)Kapil MishraОценок пока нет
- Topic3 FluidMotionДокумент35 страницTopic3 FluidMotionSomnath SomadderОценок пока нет
- Exercise: Chapter 4Документ2 страницыExercise: Chapter 4Lorenzo YapОценок пока нет
- TEST LEVEL 2 - DIPOLE MOMENT AND E, V DUE TO DIPOLE - Attempt ReviewДокумент6 страницTEST LEVEL 2 - DIPOLE MOMENT AND E, V DUE TO DIPOLE - Attempt ReviewHardik GoyalОценок пока нет
- Ogden VocabularyДокумент69 страницOgden Vocabularygunalprasadg100% (1)
- Circular Motion Investigation ReportДокумент12 страницCircular Motion Investigation ReportAlОценок пока нет
- General Physics 1: Ms. ClariceДокумент25 страницGeneral Physics 1: Ms. ClariceHoneylyn V. ChavitОценок пока нет
- Transmission LinesДокумент77 страницTransmission LinesMaraMendozaОценок пока нет
- T-0501duty Requirements 001Документ4 страницыT-0501duty Requirements 001Farooq SiddiquiОценок пока нет
- Introduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceДокумент20 страницIntroduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceGanmarie DuqueОценок пока нет
- Ala Conversion ChartДокумент1 страницаAla Conversion ChartẾch Kêu EmОценок пока нет
- 23V, 2.5A, 340Khz Synchronous Step-Down DC/DC Converter: Description FeaturesДокумент14 страниц23V, 2.5A, 340Khz Synchronous Step-Down DC/DC Converter: Description FeaturesFuadОценок пока нет
- 5th Year DiscussionДокумент22 страницы5th Year DiscussionSymon Miranda Sioson100% (1)
- Actividades 1º ESO Bilingüe T2Документ5 страницActividades 1º ESO Bilingüe T2davidbio_nrОценок пока нет
- 6.5 Literacy ANSДокумент2 страницы6.5 Literacy ANStholmesОценок пока нет
- Case 3Документ3 страницыCase 3Najmi Shafiz RozmanОценок пока нет
- Ap Physics 1 Syllabus Cms Helgemoe 2015-16Документ4 страницыAp Physics 1 Syllabus Cms Helgemoe 2015-16api-293973173Оценок пока нет
- NEET Phy Crash Course - Part 1-2018-B01Документ139 страницNEET Phy Crash Course - Part 1-2018-B01anon_616390250Оценок пока нет
- Model:: AE2415Y-FZ1BДокумент10 страницModel:: AE2415Y-FZ1BSigit MaulanaОценок пока нет
- Transmission Line & DistributionДокумент40 страницTransmission Line & DistributionAnil KumarОценок пока нет
- Physics SCIENCE Paper - 1Документ10 страницPhysics SCIENCE Paper - 128 Keshav Raj VII CОценок пока нет
- GATE 2020 Question PaperДокумент17 страницGATE 2020 Question PaperPrakash VermaОценок пока нет
- Question Papers 2011Документ9 страницQuestion Papers 2011Ebenaza GodsonОценок пока нет
- Dokumen - Tips Oera Linda BookДокумент135 страницDokumen - Tips Oera Linda BookKevin ZidaneОценок пока нет
- EM-5 Synchronizing An Alternator With The GridДокумент3 страницыEM-5 Synchronizing An Alternator With The GridYogesh KhandelwalОценок пока нет
- Physics Ch-1 For Class 11thДокумент46 страницPhysics Ch-1 For Class 11thkapil sharmaОценок пока нет
- Three Phase Induction Motors: ObjectivesДокумент20 страницThree Phase Induction Motors: ObjectivesMouliОценок пока нет
- Three Phase Induction Motor Interview Questions 2 1Документ24 страницыThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- Skin EffectДокумент6 страницSkin EffectDhilaga VathiОценок пока нет