Вам также может понравиться
- 5-5 The Triangle InequalityДокумент25 страниц5-5 The Triangle InequalityLestherОценок пока нет
- Ba 767612Документ28 страницBa 767612balajimeieОценок пока нет
- Ba 767612Документ28 страницBa 767612balajimeieОценок пока нет
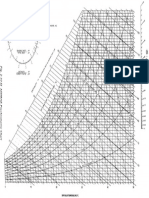
- Psychro SIДокумент1 страницаPsychro SILestherОценок пока нет
- Concepts of ConstitutionДокумент2 страницыConcepts of ConstitutionLestherОценок пока нет
- Physical Properties and Characteristics of MaterialsДокумент1 страницаPhysical Properties and Characteristics of MaterialsLestherОценок пока нет
- Physical PropertiesДокумент2 страницыPhysical PropertiesLestherОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Elsewedy EgyptДокумент7 страницElsewedy EgyptshenshОценок пока нет
- Module 2 - DC Motor DrivesДокумент61 страницаModule 2 - DC Motor DrivesMohammad Amirul ShafiqОценок пока нет
- Induction Motor Speed ControlДокумент46 страницInduction Motor Speed Controlsolo400060% (10)
- Power System Protection Lab 1Документ12 страницPower System Protection Lab 1Ronny VelásquezОценок пока нет
- Lineprotection 1600CT RatiДокумент13 страницLineprotection 1600CT RatiAnonymous W9VINoTzaОценок пока нет
- Adv Control & Robotic Lec 5Документ31 страницаAdv Control & Robotic Lec 5key3hseОценок пока нет
- Data Sheet Tr-26 Iecex GBДокумент2 страницыData Sheet Tr-26 Iecex GBmkfe2005Оценок пока нет
- Protection of Induction Motor Using PLCДокумент7 страницProtection of Induction Motor Using PLCIJRASETPublicationsОценок пока нет
- -شرح كابل الاى ون بالتفصيل (E1) - e1-signal-cable PDFДокумент3 страницы-شرح كابل الاى ون بالتفصيل (E1) - e1-signal-cable PDFBasemОценок пока нет
- DC-DC Converter For EVДокумент6 страницDC-DC Converter For EVSachin AngadiОценок пока нет
- BS-200 Service Manual (v1.1)Документ123 страницыBS-200 Service Manual (v1.1)Byron Cuevas Mendoza100% (5)
- Microwave Engineering: Matching Load ImpedancesДокумент7 страницMicrowave Engineering: Matching Load ImpedancesAzmat GuldastaОценок пока нет
- Product Sheet Switch Rotatory - Gw70437pДокумент1 страницаProduct Sheet Switch Rotatory - Gw70437pBeverly AtanozaОценок пока нет
- Cable CapacitanceДокумент6 страницCable Capacitanceadityahivalkar4141Оценок пока нет
- Antari Z Series Fog Machine User ManualДокумент20 страницAntari Z Series Fog Machine User ManualWalter SeidlОценок пока нет
- A Circularly Polarized Patch Antenna Array For Ku-Band Data-LinkДокумент2 страницыA Circularly Polarized Patch Antenna Array For Ku-Band Data-LinkTolgahan TÜYLÜОценок пока нет
- CASSETTE Inverter YKKJE12 55BZTVMCMORXДокумент6 страницCASSETTE Inverter YKKJE12 55BZTVMCMORXJuanОценок пока нет
- JQX 15F (T90)Документ1 страницаJQX 15F (T90)Amang GayamОценок пока нет
- PLC DCS Maintenance Plan and ReliabilityДокумент10 страницPLC DCS Maintenance Plan and ReliabilityEcisgroup100% (2)
- Delta VFD E Series User ManualДокумент399 страницDelta VFD E Series User ManualTendai AlfaceОценок пока нет
- FCC - ControleДокумент1 страницаFCC - ControleLuis Henrique MarangãoОценок пока нет
- Pickup Wiring 1 ConductorДокумент5 страницPickup Wiring 1 ConductorJD HОценок пока нет
- MIS Report of Distribution TransformerДокумент10 страницMIS Report of Distribution Transformersimardeepsingh3Оценок пока нет
- Electrical ConduitsДокумент8 страницElectrical ConduitsFrisco Gabriel100% (1)
- IC Layout Using L-EDITДокумент16 страницIC Layout Using L-EDITEliasA.TiongkiaoОценок пока нет
- APC Symmetra PX-2Документ8 страницAPC Symmetra PX-2drastir_777Оценок пока нет
- Mercedes (DTC) 968590102650 20210422094641Документ4 страницыMercedes (DTC) 968590102650 20210422094641Wtennessee GoesОценок пока нет
- Air Conditioning Temp Control: Erj 145 Customer TrainingДокумент17 страницAir Conditioning Temp Control: Erj 145 Customer TrainingPablo BeltranОценок пока нет
- CB 1100 control board accepts analog and digital inputДокумент4 страницыCB 1100 control board accepts analog and digital inputMuhammad Bilal KhattakОценок пока нет
- Cheetah JKM320-340M-60HB-A4-EN-F30Документ2 страницыCheetah JKM320-340M-60HB-A4-EN-F30Hüseyin SezenОценок пока нет