Вам также может понравиться
- Sacrificio de Avesv7Документ31 страницаSacrificio de Avesv7CinthiaLugoОценок пока нет
- Elmer L. GadenДокумент1 страницаElmer L. GadenCinthiaLugoОценок пока нет
- Fuente de Voltaje - 12V, 12V 04 ING ITE PIT EДокумент9 страницFuente de Voltaje - 12V, 12V 04 ING ITE PIT EJulio Alberto Malaver PizarroОценок пока нет
- Las Emociones ActividadesДокумент19 страницLas Emociones Actividadesbea lopezОценок пока нет
- Importancia de La Gestión AmbientalДокумент11 страницImportancia de La Gestión AmbientalCinthiaLugoОценок пока нет
- Electronica 1Документ11 страницElectronica 1JonathanDavidОценок пока нет
- Probl YeseniahernándezДокумент10 страницProbl YeseniahernándezCinthiaLugoОценок пока нет
- Filtro Por CondensadorДокумент13 страницFiltro Por CondensadorYesid Salcedo JimenezОценок пока нет
- Receptor FMДокумент17 страницReceptor FMteacirtro_777779991100% (1)
- Molienda en Seco y HúmedoДокумент33 страницыMolienda en Seco y HúmedoCinthiaLugoОценок пока нет
- Watzlawick Capitulo 2 ResumenДокумент5 страницWatzlawick Capitulo 2 ResumenDaiana Kistner HepperОценок пока нет
- La Pregunta Inicial (Quivy y Carnpenhoudt)Документ14 страницLa Pregunta Inicial (Quivy y Carnpenhoudt)investigandots100% (1)
- El Ejercicio Terapéutico Cognoscitivo para La Reeducación Motora Del Hemipléjico AdultoДокумент26 страницEl Ejercicio Terapéutico Cognoscitivo para La Reeducación Motora Del Hemipléjico AdultoLca GuitarsОценок пока нет
- Act 2.1 Aguilar Beltran Proyecto de Vida Basado en Las Orientaciones de Erich FrommДокумент2 страницыAct 2.1 Aguilar Beltran Proyecto de Vida Basado en Las Orientaciones de Erich FrommRosa AguilarОценок пока нет
- Examen 2Документ9 страницExamen 2Irvin Anibal Cruz HernandezОценок пока нет
- Amplificador de Audio 2w Con TransistoresДокумент11 страницAmplificador de Audio 2w Con TransistoresMarlon MontenegroОценок пока нет
- WILMER ALEXANDER CHUGA NACEVILLA - Práctica Nro. 5 - Hoja 1Документ8 страницWILMER ALEXANDER CHUGA NACEVILLA - Práctica Nro. 5 - Hoja 1Wilmer Alexander ChugaОценок пока нет
- Informe 4Документ2 страницыInforme 4Fabio Duque GiraldoОценок пока нет
- T 4-EjerciciosДокумент10 страницT 4-EjerciciosByron CarrilloОценок пока нет
- Fototransistor Aplicaciones ComunesДокумент21 страницаFototransistor Aplicaciones ComunesCarol Huayta44% (9)
- FATIMA MIREYA LUCTUALA ANGAMARCA - Práctica Nro. 3Документ11 страницFATIMA MIREYA LUCTUALA ANGAMARCA - Práctica Nro. 3Alexander BonillaОценок пока нет
- Sistemas Electrónicos InterfazДокумент15 страницSistemas Electrónicos InterfazPacoОценок пока нет
- Tarea-Inv. Convertidores CD-CDДокумент12 страницTarea-Inv. Convertidores CD-CDerik garciaОценок пока нет
- Corriente AlternaДокумент39 страницCorriente AlternaJuberly Delgado100% (1)
- Rectificadores TrifasicosДокумент20 страницRectificadores Trifasicoselkin suarezОценок пока нет
- Amplificador RestadorДокумент12 страницAmplificador RestadorTefaYánezОценок пока нет
- Flexibilidad Del Personal de Produccion y ConservacionДокумент21 страницаFlexibilidad Del Personal de Produccion y ConservacionAlberto CarranzaОценок пока нет
- Mtto Predictivo en Maquimas RotativasДокумент16 страницMtto Predictivo en Maquimas RotativasAndres Felipe VergaraОценок пока нет
- Laboratorio I - Divisor de VoltajeДокумент6 страницLaboratorio I - Divisor de VoltajeAndres Enrique González EscobarОценок пока нет
- Clase 20190820 1Документ30 страницClase 20190820 1Alvaro Carreño CarrionОценок пока нет
- Motor ImpulsionДокумент13 страницMotor ImpulsionLuis ChacónОценок пока нет
- Informe Final 5 Circuitos Electronicos 2 PDFДокумент11 страницInforme Final 5 Circuitos Electronicos 2 PDFEVERОценок пока нет
- Taller 2Документ2 страницыTaller 2Nicolas PardoОценок пока нет
- Convertidor BuckBoostДокумент9 страницConvertidor BuckBoostLuchinEQОценок пока нет
- Amplificador de InstrumentaciónДокумент32 страницыAmplificador de InstrumentaciónDiego Alexander Leon DuarteОценок пока нет
- Chopper TroceadorДокумент4 страницыChopper TroceadorAlejandro ResendizОценок пока нет
- Una Línea Trifásica de 60 HZДокумент1 страницаUna Línea Trifásica de 60 HZL'uis Guillermoo Carreto HernandezОценок пока нет
- Ramirez Alexis Preparatorio1aДокумент19 страницRamirez Alexis Preparatorio1aAlexis RamirezОценок пока нет
- Interruptores Controlados de Estado SólidoДокумент12 страницInterruptores Controlados de Estado SólidoAlexander PinedaОценок пока нет
- Fabricación y Caracterización de Un LVDTДокумент10 страницFabricación y Caracterización de Un LVDTEdwin CuencaОценок пока нет
- Lab 2-1 Amp Ope Preparatorio 2-1Документ30 страницLab 2-1 Amp Ope Preparatorio 2-1Alfredo EspinozaОценок пока нет
- Laboratorio 2 de Máquinas EléctricasДокумент2 страницыLaboratorio 2 de Máquinas EléctricasDavid Alejandro Diaz RinconОценок пока нет
- Nuevas Soluciones de Calidad de Energia Especialmente Diseñadas para Aplicaciones IndustrialesДокумент1 страницаNuevas Soluciones de Calidad de Energia Especialmente Diseñadas para Aplicaciones IndustrialesHector Morales BadilloОценок пока нет
- ELE211 Guía 7Документ5 страницELE211 Guía 7Omar PolancoОценок пока нет
- Autotransformadores IdealesДокумент10 страницAutotransformadores IdealesJorge VillegasОценок пока нет
- Parcial 1Документ2 страницыParcial 1Dana Marcela Lopez AriasОценок пока нет
- Rectificadores Monofásicos No Controlados Con Carga RLДокумент10 страницRectificadores Monofásicos No Controlados Con Carga RLraulmisea93Оценок пока нет
- El Galvanometro PDFДокумент2 страницыEl Galvanometro PDFFreddy0% (1)
- Informe Filtro PasabajoДокумент11 страницInforme Filtro PasabajoChristiaan BurbaanoОценок пока нет
- Tiri StoresДокумент8 страницTiri Storesjavier piguaveОценок пока нет
- Generador de Onda Senoidal y DistorsimetroДокумент20 страницGenerador de Onda Senoidal y DistorsimetroJulio Cesar SaiachОценок пока нет
- Control 2 ProyectoДокумент4 страницыControl 2 Proyectojaravila100% (1)
- Informe-3 2Документ19 страницInforme-3 2Carlos100% (1)
- Investigacion RectificadoresДокумент3 страницыInvestigacion RectificadoresEddys BuriОценок пока нет
- Práctica 1 Dimmer DigitalДокумент9 страницPráctica 1 Dimmer DigitalSergio RCОценок пока нет
- Ci 556Документ10 страницCi 556Akatsuki Moran RamirezОценок пока нет
- Informe 6 Potencia ComplejaДокумент13 страницInforme 6 Potencia ComplejaLelylo ArmijosОценок пока нет
- Laboratorio 5 TerminadoДокумент3 страницыLaboratorio 5 TerminadoDaniel BallesterosОценок пока нет
- Disparo Lineal de TiristoresДокумент13 страницDisparo Lineal de TiristoresRaul CarrilloОценок пока нет
- Vúmetro de 8 LED Con LM324Документ11 страницVúmetro de 8 LED Con LM324Moisés HernándezОценок пока нет
- Consideraciones Generales de La FrecuenciaДокумент2 страницыConsideraciones Generales de La Frecuenciafabriziod16Оценок пока нет
- Aplicaciones de Los FETДокумент8 страницAplicaciones de Los FETEvelyn MoranОценок пока нет
- Terminales y Tipos de Encapsulado Los Transistores Tienen Tres Terminales Los Cuales Deben Conectarse de La Manera CorrectaДокумент1 страницаTerminales y Tipos de Encapsulado Los Transistores Tienen Tres Terminales Los Cuales Deben Conectarse de La Manera CorrectaKARLAОценок пока нет
- Oscilador de Relajacion Con UjtДокумент8 страницOscilador de Relajacion Con UjtJuan Carlos Pozo100% (1)
- Investigacion ControladoresДокумент8 страницInvestigacion ControladoresGuillermo Jesus Lopez SantosОценок пока нет
- Características DinamicasДокумент22 страницыCaracterísticas DinamicassistemaelectricoОценок пока нет
- Sintonizacion Conroladores Pid 2014 1 PDFДокумент37 страницSintonizacion Conroladores Pid 2014 1 PDFLubrication´s RoomОценок пока нет
- Sintonización de Controladores Lazo Cerrado PDFДокумент17 страницSintonización de Controladores Lazo Cerrado PDFAlexander MMОценок пока нет
- UF0571 - Programas informáticos en eficiencia energética en edificiosОт EverandUF0571 - Programas informáticos en eficiencia energética en edificiosОценок пока нет
- Piramidon 66 PP PDFДокумент137 страницPiramidon 66 PP PDFCinthiaLugoОценок пока нет
- Vida de AnaquelДокумент19 страницVida de AnaquelCinthiaLugoОценок пока нет
- Metodo Fotografico-BiorreactoresДокумент8 страницMetodo Fotografico-BiorreactoresCinthiaLugoОценок пока нет
- CRISTALIZACIÓNДокумент6 страницCRISTALIZACIÓNCinthiaLugoОценок пока нет
- La Ribonucleótido ReductasaДокумент13 страницLa Ribonucleótido ReductasaCinthiaLugoОценок пока нет
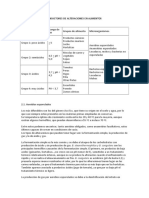
- Microorganismos AlterantesДокумент4 страницыMicroorganismos AlterantesCinthiaLugoОценок пока нет
- Diseño de Un Control de Temperatura Inteligente para Incubadoras de Recién NacidosДокумент3 страницыDiseño de Un Control de Temperatura Inteligente para Incubadoras de Recién NacidosCinthiaLugoОценок пока нет
- Instrumentos de CreditoДокумент26 страницInstrumentos de CreditoCinthiaLugo100% (1)
- Bases Moleculares de La Ingeniería GenéticaДокумент11 страницBases Moleculares de La Ingeniería GenéticaCinthiaLugoОценок пока нет
- Ensayo TDCДокумент2 страницыEnsayo TDCQSoncco Any100% (1)
- Sesión 6 - Aprendizaje Del Consumidor PDFДокумент29 страницSesión 6 - Aprendizaje Del Consumidor PDFYulissa CLОценок пока нет
- La Chaco - Juan SolaДокумент26 страницLa Chaco - Juan SolaGuillermo NavarreteОценок пока нет
- Clima Organizacional y Su Incidencia en El Desempeño Laboral en Hipermercado TottusДокумент3 страницыClima Organizacional y Su Incidencia en El Desempeño Laboral en Hipermercado TottusGerson ValdezОценок пока нет
- Evaluacion Justicia SocialДокумент4 страницыEvaluacion Justicia SocialEnrique Constantino PortillaОценок пока нет
- Re Arqui Andrea - Gonzalez Karla - Tapia Complejo - Cultural.educativo Datos PDFДокумент298 страницRe Arqui Andrea - Gonzalez Karla - Tapia Complejo - Cultural.educativo Datos PDFLinda Valentina Perez PeredaОценок пока нет
- La Expresión Corporal y La DramatizaciónДокумент11 страницLa Expresión Corporal y La DramatizaciónLissFloresОценок пока нет
- El Rol Del Docente en Primera InfanciaДокумент3 страницыEl Rol Del Docente en Primera InfanciaLaura GiraldoОценок пока нет
- Laszlo Mojoly Nagy y de Los Materiales de ArquitecturaДокумент1 страницаLaszlo Mojoly Nagy y de Los Materiales de ArquitecturaKОценок пока нет
- Formato de Historia ClinicaДокумент5 страницFormato de Historia ClinicaMichelle Pazmiño ArmasОценок пока нет
- Inei - Ece AplicadorДокумент4 страницыInei - Ece Aplicadorrovc17_03_87Оценок пока нет
- Tutoria EmpatiaДокумент6 страницTutoria EmpatiaRoxana Veronica Bruno WatsonОценок пока нет
- Sinonimos Importantes en InglesДокумент1 страницаSinonimos Importantes en InglesfernandaОценок пока нет
- A1 NUEVAS TENDENCIAS EN LA GESTION DEL TALENTO HUMANO - Instituto Juan Mejia Baca - Expositor Diciembre 2018 PDFДокумент86 страницA1 NUEVAS TENDENCIAS EN LA GESTION DEL TALENTO HUMANO - Instituto Juan Mejia Baca - Expositor Diciembre 2018 PDFCesar Montoya RamirezОценок пока нет
- La Conciencia Fonologica Como Una Zona de Desarrollo Proximo para El Aprendizaje Inicial de La LecturaДокумент14 страницLa Conciencia Fonologica Como Una Zona de Desarrollo Proximo para El Aprendizaje Inicial de La LecturaNatacha AyaquintuyОценок пока нет
- Folleto PsicologiaДокумент4 страницыFolleto PsicologiaValentina Oliva MartinezОценок пока нет
- Facilitador AdolescentesДокумент206 страницFacilitador AdolescentesNatalia CárdenasОценок пока нет
- FICHA DESCRIPTIVA RosarioДокумент3 страницыFICHA DESCRIPTIVA RosarioPablo MirandaОценок пока нет
- Informe de La Evaluacion Del Pat y Compromisos de 3 AñosДокумент5 страницInforme de La Evaluacion Del Pat y Compromisos de 3 Añosalbertohz1Оценок пока нет
- Análisis de ImágenesДокумент2 страницыAnálisis de ImágenesAlbany MenaОценок пока нет
- Política y Planificación LingüísticasДокумент35 страницPolítica y Planificación LingüísticasIbrahim Leiva VeraОценок пока нет
- Procesos Superiores Aplicados A Los Procesos CognitivosДокумент1 страницаProcesos Superiores Aplicados A Los Procesos CognitivosEMILIANO ARAMIS 6EM ORTEGA ROMEROОценок пока нет
- Planificador Semanal de Actividades Semana 22 Sexto GradoДокумент3 страницыPlanificador Semanal de Actividades Semana 22 Sexto GradoJACKELINE AMELIA CARHUAJULCA NECIOSUPОценок пока нет
- Reflexiones Trabajo Equipo PDFДокумент17 страницReflexiones Trabajo Equipo PDFViktorОценок пока нет
- 5° Malla Curricular LenguajeДокумент4 страницы5° Malla Curricular LenguajeLuz Elida Monsalve Moreno100% (1)