Вам также может понравиться
- End EffectorsДокумент19 страницEnd Effectorsmskumar_554Оценок пока нет
- End EffectorДокумент28 страницEnd EffectorROHIT SRIVASTAVОценок пока нет
- Robot End-Effector: Er - Rashmi Assistant Professor GNA UniversityДокумент44 страницыRobot End-Effector: Er - Rashmi Assistant Professor GNA UniversitykpsprabhakaranОценок пока нет
- End EffectorsДокумент31 страницаEnd EffectorsHIRWA YVAN MVUNABOОценок пока нет
- Robotic Gripper DesignДокумент22 страницыRobotic Gripper DesignHaider-e-KararОценок пока нет
- Final Project PrintДокумент31 страницаFinal Project PrintDIPAK ALHATEОценок пока нет
- Consider Typical Robots Consider Typical RobotsДокумент16 страницConsider Typical Robots Consider Typical RobotsOthers ATBP.Оценок пока нет
- End of Arm ToolingДокумент31 страницаEnd of Arm ToolingKarthikeyan MurugananthanОценок пока нет
- End of Arm ToolingДокумент31 страницаEnd of Arm ToolingNguyễn HuyОценок пока нет
- OIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)Документ12 страницOIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)MICHEL RAJОценок пока нет
- Single Notcher ComparisonДокумент12 страницSingle Notcher ComparisonssnvetОценок пока нет
- Robot End Effectors: DR V S KrushnasamyДокумент48 страницRobot End Effectors: DR V S KrushnasamyKrushnasamy SuramaniyanОценок пока нет
- Cat 2017 LRДокумент96 страницCat 2017 LRjose.barrera.vОценок пока нет
- 8 Robotic GrippersДокумент25 страниц8 Robotic GrippersAdam MahmoodОценок пока нет
- Types of End Effectors Rajesh MallelaДокумент36 страницTypes of End Effectors Rajesh MallelaHussain YousifОценок пока нет
- Robotics Unit-2 Important QuestionsДокумент12 страницRobotics Unit-2 Important QuestionsBEN G.YОценок пока нет
- Robot Welding Technology (Robotic Welding)Документ16 страницRobot Welding Technology (Robotic Welding)Chandra Prakash SharmaОценок пока нет
- Dhairya RoboticДокумент8 страницDhairya Roboticmitulshah18Оценок пока нет
- Chapter 15Документ34 страницыChapter 15Shaheer Ahmed KhanОценок пока нет
- Industrial Robotics and Control Assignment: Q) 1 Explain Industrial Internet of Things?Документ8 страницIndustrial Robotics and Control Assignment: Q) 1 Explain Industrial Internet of Things?vara prasadОценок пока нет
- Robot End EffectorДокумент25 страницRobot End EffectorRakeshSainiОценок пока нет
- Master CatalogДокумент26 страницMaster CatalogJose Luis BarbaranОценок пока нет
- Robo 2Документ10 страницRobo 2mitulshah18Оценок пока нет
- Lecture 2-2: Robotics Robotics and and Automation AutomationДокумент8 страницLecture 2-2: Robotics Robotics and and Automation Automationharikiran3285Оценок пока нет
- Me 1008 - RoboticsДокумент10 страницMe 1008 - RoboticsmaverickhydronОценок пока нет
- Robotic ArmДокумент23 страницыRobotic ArmJapnam SodhiОценок пока нет
- Catálogo GefranДокумент20 страницCatálogo GefranRobsonNunesDalColОценок пока нет
- Final Suggestion 014056Документ11 страницFinal Suggestion 014056TohidulОценок пока нет
- ME3F - Robot Report 1 - Group3Документ13 страницME3F - Robot Report 1 - Group3Mohammed AlmohjiliОценок пока нет
- Hougen CatalogДокумент40 страницHougen CatalogchivetoОценок пока нет
- Parallel Grippers Part1 WatermarkДокумент106 страницParallel Grippers Part1 Watermarkapi-298653613Оценок пока нет
- Gripper: Types of GripsДокумент6 страницGripper: Types of GripsRajandra VermaОценок пока нет
- Me3403-Robotics and Machine Vision SystemДокумент19 страницMe3403-Robotics and Machine Vision SystemSengottaiyan MalaisamyОценок пока нет
- Chigo - Service ManualДокумент50 страницChigo - Service Manualandutza4uОценок пока нет
- Remote Control Robotic Arm: Fatih BölükbaşДокумент25 страницRemote Control Robotic Arm: Fatih BölükbaşFatih BölükbaşОценок пока нет
- End EffectorsДокумент21 страницаEnd EffectorsAthira Sobhana RamachandranОценок пока нет
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentОт EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Enerpac Bolting ToolsДокумент88 страницEnerpac Bolting ToolsSaad OkashaОценок пока нет
- Shantilal Shah Engineering College BhavnagarДокумент18 страницShantilal Shah Engineering College BhavnagarAshwin BuddharajuОценок пока нет
- LV02 - Foundation Skills - Issue 1Документ61 страницаLV02 - Foundation Skills - Issue 1Valentin Silvan Valentin SilvanОценок пока нет
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyДокумент30 страницAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Industrial Machinery & Tools Corporation: ProfileДокумент7 страницIndustrial Machinery & Tools Corporation: ProfileGopi KrishnaОценок пока нет
- Introduction To ROBOTICSДокумент25 страницIntroduction To ROBOTICSNyandaMadili MalashiОценок пока нет
- Aitek Magnetic Pickups MPU Cat08 - SensorsДокумент40 страницAitek Magnetic Pickups MPU Cat08 - SensorsJose Luis Castro Aguilar0% (1)
- Comparator SДокумент11 страницComparator SsimalaraviОценок пока нет
- Yanmar Mini Excavator Vio25Документ8 страницYanmar Mini Excavator Vio25ashahulhjОценок пока нет
- For Stringing TrainingДокумент84 страницыFor Stringing Trainingcoolbugger97% (68)
- Mechanical Shock and Vibration TestingДокумент43 страницыMechanical Shock and Vibration TestingAmit Singh DehuryОценок пока нет
- CNC Wire Cut Edm: 1. Non Traditional Machining LaboratoryДокумент5 страницCNC Wire Cut Edm: 1. Non Traditional Machining LaboratoryAkash KumarОценок пока нет
- 05 Selection of Tightening ToolsДокумент8 страниц05 Selection of Tightening ToolsAniigiselaОценок пока нет
- Chaapter 3 Part 2Документ11 страницChaapter 3 Part 2robelОценок пока нет
- Manufacturers & Suppliers: Izod and Charpy Apparatus Make "Dinesh" Model DS 102Документ3 страницыManufacturers & Suppliers: Izod and Charpy Apparatus Make "Dinesh" Model DS 102Ashish VermaОценок пока нет
- JKP Robo PДокумент3 страницыJKP Robo Pmitulshah18Оценок пока нет
- MekatronikaДокумент19 страницMekatronikaMoch Arinal HaqqОценок пока нет
- Robots in WeldingДокумент12 страницRobots in WeldingRehan SharmaОценок пока нет
- Industrial Elecs Lecture PDFДокумент94 страницыIndustrial Elecs Lecture PDFJaneОценок пока нет
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisОт EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisРейтинг: 4 из 5 звезд4/5 (2)
- Industrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionОт EverandIndustrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Unit II - Electric Actuators - StepperДокумент16 страницUnit II - Electric Actuators - StepperGnanasekarОценок пока нет
- What Is A Stepper MotorДокумент8 страницWhat Is A Stepper MotorGnanasekarОценок пока нет
- Inductive Proximity SensorsДокумент9 страницInductive Proximity SensorsGnanasekarОценок пока нет
- Fundamentals of Lefm and Applications To: Fatigue Crack GrowthДокумент133 страницыFundamentals of Lefm and Applications To: Fatigue Crack Growthcrishorbach8078Оценок пока нет
- A Computational Model For Bending Fatigue AnalysesДокумент7 страницA Computational Model For Bending Fatigue AnalysesSezgin BayrakОценок пока нет
- Landing GearДокумент1 страницаLanding GearGnanasekarОценок пока нет
- Ethiopian Crash Investigation Progress ReportДокумент28 страницEthiopian Crash Investigation Progress ReportNicholas_E_Cre_2008Оценок пока нет
- Historic Wings: 1853 Caley GliderДокумент8 страницHistoric Wings: 1853 Caley GlidertnuagОценок пока нет
- How A Rocket Engine WorksДокумент5 страницHow A Rocket Engine Worksmxg5063100% (1)
- Parker PDFДокумент4 страницыParker PDFYohan RahmadaniОценок пока нет
- Face Sheet Wrinkling NASAДокумент49 страницFace Sheet Wrinkling NASAsovsepОценок пока нет
- Jinas Resume For AmeДокумент2 страницыJinas Resume For AmeVipul ShindeОценок пока нет
- Aw119 MK II r0Документ16 страницAw119 MK II r0vanessamecenasОценок пока нет
- Chapter 11: Horizontal Tail Installation: Revision ListДокумент6 страницChapter 11: Horizontal Tail Installation: Revision ListMark Evan SalutinОценок пока нет
- NewspaperДокумент54 страницыNewspaperMataishung NingshenОценок пока нет
- SB Open LJRДокумент10 страницSB Open LJRrockmansatuОценок пока нет
- Measurements in Fluid MechanicsДокумент27 страницMeasurements in Fluid Mechanicshmxa91Оценок пока нет
- Maintenance Performance ToolboxДокумент6 страницMaintenance Performance ToolboxMagda ScrobotaОценок пока нет
- J Fluids Engineering 2009 Vol 131 N8Документ110 страницJ Fluids Engineering 2009 Vol 131 N8Нильва Александр100% (1)
- LKPR (Ruzyne) : General InfoДокумент24 страницыLKPR (Ruzyne) : General InfoAugustin PОценок пока нет
- Spicer Axles FeaturingДокумент2 страницыSpicer Axles FeaturingJean Paul BésОценок пока нет
- Technology Technology: Gas Turbine ResearchДокумент12 страницTechnology Technology: Gas Turbine ResearchDR DOОценок пока нет
- Authorised Release Certificate: Casa Form 1Документ18 страницAuthorised Release Certificate: Casa Form 1Adalberto Sánchez SolórzanoОценок пока нет
- Poster Group 7Документ1 страницаPoster Group 7api-392769552Оценок пока нет
- 9A21601 Flight Mechanics - IIДокумент4 страницы9A21601 Flight Mechanics - IIsivabharathamurthyОценок пока нет
- Singapore AirlinesДокумент15 страницSingapore AirlinesNimish NewatiaОценок пока нет
- HK Aerial Paperlaul2015Документ17 страницHK Aerial Paperlaul2015RodolfoPerezEscalonaОценок пока нет
- Amm 320 Capitulo 24 Sistemas Elec.Документ1 215 страницAmm 320 Capitulo 24 Sistemas Elec.Master DarkОценок пока нет
- Part-145 Approved Maintenance OrganisationsДокумент24 страницыPart-145 Approved Maintenance Organisationsbudiaero100% (2)
- VSP Aircraft Analysis User ManualДокумент58 страницVSP Aircraft Analysis User ManualStanley Ochieng' OumaОценок пока нет
- A Study of A Skirtless Hovercraft DesignДокумент71 страницаA Study of A Skirtless Hovercraft DesignSunil Kumar P GОценок пока нет
- Eosid - Improve Payload and Commercial OperationsДокумент5 страницEosid - Improve Payload and Commercial OperationsBruno RamioulleОценок пока нет
- Aircraft Manual Supplement: B737 PM-CPDLC Acars Cmu Ii UpgradeДокумент45 страницAircraft Manual Supplement: B737 PM-CPDLC Acars Cmu Ii UpgradeEugy AlexОценок пока нет
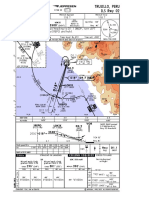
- Trujillo Ils Rwy 02Документ1 страницаTrujillo Ils Rwy 02Mateo CardenasОценок пока нет
- Cheyenne - APДокумент14 страницCheyenne - APtumb100% (1)