Вам также может понравиться
- Course - Ng-Bootstrap PlaybookДокумент49 страницCourse - Ng-Bootstrap PlaybookshyamVENKATОценок пока нет
- Strategic Management Term PaperДокумент18 страницStrategic Management Term PaperOchena RajkonnaОценок пока нет
- Control System Engineering: Lab ManualДокумент14 страницControl System Engineering: Lab ManualGaff jsjsjjsОценок пока нет
- Boğaziçi University Kandilli Observatory and Earthquake Research Institute Department of Earthquake EngineeringДокумент15 страницBoğaziçi University Kandilli Observatory and Earthquake Research Institute Department of Earthquake EngineeringKoustav MajumdarОценок пока нет
- Name: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusДокумент15 страницName: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusZulfiqar AliОценок пока нет
- Guia Control en Tiempo Discreto Con MATLAB TutorialДокумент8 страницGuia Control en Tiempo Discreto Con MATLAB TutorialAthos Nikolai Campana VeraОценок пока нет
- Step ResponseДокумент2 страницыStep ResponseAnonymous Np7QdJОценок пока нет
- Control Lab Report 1Документ11 страницControl Lab Report 1Waqas IqrarОценок пока нет
- MATLAB Coding For Step Response of First Order System Frit Order System ( ) ( ) 1 + 5 Clear CLC A (1) B (1 1) C TF (A, B) Step (C)Документ2 страницыMATLAB Coding For Step Response of First Order System Frit Order System ( ) ( ) 1 + 5 Clear CLC A (1) B (1 1) C TF (A, B) Step (C)mohasan aliОценок пока нет
- MATLAB Results Case 1: Response of The System To Step Input With Out Controller With ControllerДокумент7 страницMATLAB Results Case 1: Response of The System To Step Input With Out Controller With ControllerBhimsen ShresthaОценок пока нет
- CEP Sol LCS Saifullah (Uw-17-Ee-Bsc-059)Документ7 страницCEP Sol LCS Saifullah (Uw-17-Ee-Bsc-059)saifullahОценок пока нет
- Feedback Control - On Off & PIDДокумент20 страницFeedback Control - On Off & PIDRizaldi MaulanaОценок пока нет
- Lab # 05Документ14 страницLab # 05ameer hamzaОценок пока нет
- Cycle - II ExperimentsДокумент26 страницCycle - II ExperimentsEr. ShajuОценок пока нет
- ENG3018 Practical 0Документ11 страницENG3018 Practical 0henryОценок пока нет
- Dtlab 6Документ12 страницDtlab 6HaiderОценок пока нет
- Experiment No: 01: Name of Experiment ObjectiveДокумент7 страницExperiment No: 01: Name of Experiment ObjectiveSanjid ElahiОценок пока нет
- CSL01Документ7 страницCSL01Mahnoor KhanОценок пока нет
- Simulation PDFДокумент2 страницыSimulation PDFreza azimzadehОценок пока нет
- Num (1 1) Den (1 1.2 1) Step (Num, Den) GridДокумент2 страницыNum (1 1) Den (1 1.2 1) Step (Num, Den) GridtyoОценок пока нет
- MarkovДокумент61 страницаMarkovblahblah435Оценок пока нет
- CSL04Документ21 страницаCSL04Mahnoor KhanОценок пока нет
- Day1 PPTДокумент26 страницDay1 PPTvinitОценок пока нет
- L5 2nd Order Charac Contd, Dominant PolesДокумент16 страницL5 2nd Order Charac Contd, Dominant Polesalex carterОценок пока нет
- System Analysis: Itce470: Control Sysytem Experiment No. 3Документ7 страницSystem Analysis: Itce470: Control Sysytem Experiment No. 3HALIMAОценок пока нет
- Mathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperДокумент26 страницMathematical Modeling and Simulation of SAS System With Magnetorheological (MR) DamperRafli AlnursyahОценок пока нет
- Control Engineering LAB-6 Introduction To Some MATLAB's Control Functions Root Locus 6.1: Root LocusДокумент12 страницControl Engineering LAB-6 Introduction To Some MATLAB's Control Functions Root Locus 6.1: Root LocussaadfarazkhanОценок пока нет
- Task 1:: A G (S) s+1Документ23 страницыTask 1:: A G (S) s+1Tajdar HaiderОценок пока нет
- Control System LAB Assignment 03 Fa18-EEE-009 Waris Shah: DATE: 01 April 21Документ5 страницControl System LAB Assignment 03 Fa18-EEE-009 Waris Shah: DATE: 01 April 21Waris ShahОценок пока нет
- LAB01 Control SystemДокумент7 страницLAB01 Control SystemMuhammad DaniyalОценок пока нет
- LAB01 Control SystemДокумент6 страницLAB01 Control SystemMuhammad DaniyalОценок пока нет
- Quadrature Amplitude ModulationДокумент5 страницQuadrature Amplitude ModulationAsti Putri RahmadiniОценок пока нет
- LCS Lab 5 7BДокумент16 страницLCS Lab 5 7BAwais SadaqatОценок пока нет
- Percobaan 1: 'Unit-Step Response'Документ2 страницыPercobaan 1: 'Unit-Step Response'Kuntum RahmadinaОценок пока нет
- Percobaan 1a: Step ResponseДокумент3 страницыPercobaan 1a: Step ResponseBlasius NgamaОценок пока нет
- Vector PrintoutsДокумент1 страницаVector Printoutsbarak_tzoriОценок пока нет
- 1.1 Step Response: Lab 2 - MECH 4310.002 Josiah Rohne Kingslea StringhamДокумент8 страниц1.1 Step Response: Lab 2 - MECH 4310.002 Josiah Rohne Kingslea StringhamChrisCaywoodОценок пока нет
- Model Identification and Controller DesignДокумент6 страницModel Identification and Controller DesignMichaelОценок пока нет
- PID ControlДокумент38 страницPID ControlInitial MОценок пока нет
- All ResultsДокумент29 страницAll ResultsAndrew EwersОценок пока нет
- Dcs Experimentno5 New Sarvesh 16103a0047Документ5 страницDcs Experimentno5 New Sarvesh 16103a0047Rijul UgawekarОценок пока нет
- EEE309 CT3 - January2016Документ2 страницыEEE309 CT3 - January2016Engr. Shahidul IslamОценок пока нет
- Online Control Lecture #3Документ17 страницOnline Control Lecture #3Noor GamingОценок пока нет
- PID Control Using MATLAB Simulation: Lecturer: 黃教琪 Int. phone #:4375 s8323091@cc.ncu.edu.twДокумент13 страницPID Control Using MATLAB Simulation: Lecturer: 黃教琪 Int. phone #:4375 s8323091@cc.ncu.edu.twRABEAОценок пока нет
- Advanced Microprocessor QuestionsДокумент32 страницыAdvanced Microprocessor QuestionsNikhil PathakОценок пока нет
- Controller Proporsional IntegralДокумент3 страницыController Proporsional IntegralTitoezz D'javanezquerqueОценок пока нет
- Lab 08Документ4 страницыLab 08Mohsin IqbalОценок пока нет
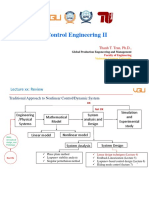
- Control Engineering II: Thanh T. Tran, PH.D.Документ36 страницControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiОценок пока нет
- QuestionДокумент4 страницыQuestionAmr MohamedОценок пока нет
- Graph f2 PDFДокумент3 страницыGraph f2 PDFnoraОценок пока нет
- Hydraulic Gradient, I Vs Velocity, V (M/S)Документ3 страницыHydraulic Gradient, I Vs Velocity, V (M/S)noraОценок пока нет
- First Order SystemsДокумент158 страницFirst Order SystemsGathy BrayohОценок пока нет
- Linear Control System Lab: Investigate The Time Response of Translational Mechanical SystemДокумент12 страницLinear Control System Lab: Investigate The Time Response of Translational Mechanical SystemMuhammad Saad AbdullahОценок пока нет
- Module 5: Design of Sampled Data Control Systems: Lecture Note 3Документ6 страницModule 5: Design of Sampled Data Control Systems: Lecture Note 3Yuv RajОценок пока нет
- CLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleДокумент8 страницCLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleSanjid ElahiОценок пока нет
- LCS Lab 11Документ9 страницLCS Lab 11SaRosh RaeesОценок пока нет
- Saat Nilai KP 20: 1. Control ProportionalДокумент7 страницSaat Nilai KP 20: 1. Control ProportionalTitoezz D'javanezquerqueОценок пока нет
- Digital Image Processing ECE 533 Assignment 4 Due Date: March 11, in ClassДокумент7 страницDigital Image Processing ECE 533 Assignment 4 Due Date: March 11, in ClassEdo Black After LightОценок пока нет
- Online Control Lecture 3Документ17 страницOnline Control Lecture 3Amylia NatashaОценок пока нет
- Figure Tp1sal - CopieДокумент4 страницыFigure Tp1sal - CopieAudrey YagueОценок пока нет
- Modelling and Identification Germany UniversityДокумент42 страницыModelling and Identification Germany UniversityAgustin SanchezОценок пока нет
- 204.4118.01 DmSwitch EDD Command ReferenceДокумент247 страниц204.4118.01 DmSwitch EDD Command ReferencemoxdyОценок пока нет
- Recommended Screen Time by Age Here's What The Experts Say - Screen TimeДокумент1 страницаRecommended Screen Time by Age Here's What The Experts Say - Screen TimeKarima Iffani UlifahОценок пока нет
- PUMP MMTV Vertical Mixed Flow Multistage Pump With CanisterДокумент3 страницыPUMP MMTV Vertical Mixed Flow Multistage Pump With Canisterarondaniel ocampoОценок пока нет
- ISO 9001 - 2015 Awareness Training at PuneДокумент1 страницаISO 9001 - 2015 Awareness Training at PunematrixmazeОценок пока нет
- M. of St. Lighting Poles Installation & Related LCPДокумент18 страницM. of St. Lighting Poles Installation & Related LCPWaleed Salih100% (1)
- 2023-6-23-Minutes of Monthly Coordination Meeting - 06 (PIU, PIC & KRJV) DraftДокумент7 страниц2023-6-23-Minutes of Monthly Coordination Meeting - 06 (PIU, PIC & KRJV) DraftSivamurugan SivanayagamОценок пока нет
- ACS880 - Diode Supply CNTRL Prog - FW Manual - Rev BДокумент126 страницACS880 - Diode Supply CNTRL Prog - FW Manual - Rev BerrikcoyОценок пока нет
- LogДокумент130 страницLogZaheerabbas KhanОценок пока нет
- TN - SP021 - E1 - 0 Call Flow and Supplementary Service Flow in CS Domain-65Документ62 страницыTN - SP021 - E1 - 0 Call Flow and Supplementary Service Flow in CS Domain-65Tanzyy.2018Оценок пока нет
- Instruction Manual: Fundus CameraДокумент37 страницInstruction Manual: Fundus Camerashakil ahmadОценок пока нет
- Cut Off Points Private. Ay 2020-2021 AdmissionsДокумент6 страницCut Off Points Private. Ay 2020-2021 AdmissionsRonnie AtuhaireОценок пока нет
- Grades of Reinforcing SteelДокумент15 страницGrades of Reinforcing Steelshuckss taloОценок пока нет
- List Advantages and Disadvantages of Dynamic Memory Allocation vs. Static Memory Allocation.? AdvantagesДокумент39 страницList Advantages and Disadvantages of Dynamic Memory Allocation vs. Static Memory Allocation.? AdvantagesSajan KlОценок пока нет
- GeofencingДокумент3 страницыGeofencinggirishtiwaskarОценок пока нет
- Exercise Book (FI109) - (Joint Venture) v1.1Документ9 страницExercise Book (FI109) - (Joint Venture) v1.1Shyam JaganathОценок пока нет
- DSE335 Operators ManualДокумент90 страницDSE335 Operators ManualcarlosrmtzОценок пока нет
- A Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaДокумент36 страницA Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaargaОценок пока нет
- Power Electronics (EIEN25) Exercises With SolutionsДокумент245 страницPower Electronics (EIEN25) Exercises With SolutionsBaynaa DaariimaaОценок пока нет
- Xirrus Enterprise WiFiДокумент2 страницыXirrus Enterprise WiFiLuis MendozaОценок пока нет
- Digital Marketing & Strategic FoundationsДокумент33 страницыDigital Marketing & Strategic FoundationsimadОценок пока нет
- The A - Z Guide of PythonДокумент11 страницThe A - Z Guide of PythonSakshi JainОценок пока нет
- Hurco/Hurco Ultimax: CNC Communications Setup RS-232 or Networked EthernetДокумент8 страницHurco/Hurco Ultimax: CNC Communications Setup RS-232 or Networked EthernetjezloiОценок пока нет
- File HandlingДокумент25 страницFile HandlingThe Invincible'sОценок пока нет
- Zero2prod With Cover Light Theme 20211228Документ317 страницZero2prod With Cover Light Theme 20211228caitlin.gaooОценок пока нет
- ElectrecityДокумент2 страницыElectrecityMarchli AhmedОценок пока нет
- Harvey Gulf International Marine: Competency ProfileДокумент5 страницHarvey Gulf International Marine: Competency ProfileAntonio SerranoОценок пока нет
- 3D Construction Printing: Technical Specifications 2021Документ3 страницы3D Construction Printing: Technical Specifications 2021Camilo Sebastián Romero VivancoОценок пока нет
- File Upload XSS - Hack 2 LearnДокумент12 страницFile Upload XSS - Hack 2 LearnTech HelpОценок пока нет