Вам также может понравиться
- Lecture 02 Electrical Networks Transfer FunctionДокумент18 страницLecture 02 Electrical Networks Transfer FunctionShehroze TalatОценок пока нет
- RLC Circuit Transfer Functions - KSB - 03 Aug 2020Документ44 страницыRLC Circuit Transfer Functions - KSB - 03 Aug 2020Kì Hyö JüngОценок пока нет
- Electrical Network Transfer FunctionДокумент21 страницаElectrical Network Transfer FunctionRyan Arce100% (2)
- Quiz 01aae Taylorseries AnswersДокумент7 страницQuiz 01aae Taylorseries AnswersYahya IsiedОценок пока нет
- Differential Equation Question PDFДокумент19 страницDifferential Equation Question PDFvivek chandОценок пока нет
- Exponential Shift and Inverse Differential OperatorsДокумент20 страницExponential Shift and Inverse Differential OperatorsMark MercadoОценок пока нет
- Laplace Transform Example Solution PDFДокумент105 страницLaplace Transform Example Solution PDFBhoszx Carl DoradoОценок пока нет
- Signals and Systems Model Exit ExamДокумент12 страницSignals and Systems Model Exit ExamZerubabel FasikaОценок пока нет
- CH 11Документ43 страницыCH 11Cumali Türkeri100% (1)
- Fourier Series PDFДокумент26 страницFourier Series PDFRM FakharОценок пока нет
- Transfer Function State Space Representation RLC Circuit Example 1Документ4 страницыTransfer Function State Space Representation RLC Circuit Example 1Caio CabralОценок пока нет
- Module-3 Laplace and Inverse Laplace Transforms PDFДокумент45 страницModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarОценок пока нет
- Chapter Eight: Dc-Ac Conversion: InvertersДокумент57 страницChapter Eight: Dc-Ac Conversion: InvertersMd NazimОценок пока нет
- CH 13 Solutions Practice ProblemsДокумент5 страницCH 13 Solutions Practice Problemssudarshan poojaryОценок пока нет
- EDC-I Easy Solution SEM3-1 PDFДокумент112 страницEDC-I Easy Solution SEM3-1 PDFSumedh SatamОценок пока нет
- Electrical Engineering Numerical AnalysisДокумент10 страницElectrical Engineering Numerical AnalysisAddisu Safo BoseraОценок пока нет
- Inverse LaplaceДокумент19 страницInverse LaplaceSudeep KhareОценок пока нет
- 5 Electric Flux Density and Gauss's LawДокумент26 страниц5 Electric Flux Density and Gauss's LawMarc Rivera0% (1)
- Unit 3 Common Fourier Transforms Questions and Answers - Sanfoundry PDFДокумент8 страницUnit 3 Common Fourier Transforms Questions and Answers - Sanfoundry PDFzohaibОценок пока нет
- Z TransformДокумент28 страницZ TransformMoiz Hussain100% (1)
- A Differential Equation For DC MotorДокумент7 страницA Differential Equation For DC MotorAhmed HwaidiОценок пока нет
- Engineering Students' Guide to Complex NumbersДокумент130 страницEngineering Students' Guide to Complex NumbersLorraine Sta. Clara100% (1)
- Solution To The Drill Problems of Chapter 01 (Engineering Electromagnetics, Hayt, A.Buck 7th Ed) BEE 4A, 4B & 4C D1.1 (A) - (B)Документ2 страницыSolution To The Drill Problems of Chapter 01 (Engineering Electromagnetics, Hayt, A.Buck 7th Ed) BEE 4A, 4B & 4C D1.1 (A) - (B)sajjadОценок пока нет
- Feedback Control System CharacteristicsДокумент17 страницFeedback Control System Characteristicsunnvishnu100% (1)
- Exact Differential EquationДокумент27 страницExact Differential EquationEdsel Jay Taghap50% (2)
- Activity01 (1) CarreonДокумент14 страницActivity01 (1) CarreonHaja Kiev Erenz CarreonОценок пока нет
- Problems On Mechanical SystemsДокумент52 страницыProblems On Mechanical SystemsSheikameer Batcha83% (6)
- 13Документ12 страниц13MEOW41Оценок пока нет
- FeedCon (Unit 4)Документ32 страницыFeedCon (Unit 4)Dovie MayОценок пока нет
- Ch6 Open - Methods 10 10 2010Документ47 страницCh6 Open - Methods 10 10 2010No RaimaОценок пока нет
- Bisection MethodДокумент9 страницBisection MethodAtika Mustari SamiОценок пока нет
- Equations Reducible To Variables SeparableДокумент4 страницыEquations Reducible To Variables SeparablebenrasheedОценок пока нет
- Lecture-6-7-8 Modelling of Mechanical SystemsДокумент63 страницыLecture-6-7-8 Modelling of Mechanical Systemshemal4379100% (1)
- Laplace Transform-Signal ProcessingДокумент41 страницаLaplace Transform-Signal ProcessingstanculeanuОценок пока нет
- Power Systems Kuestion PDFДокумент37 страницPower Systems Kuestion PDFsanthosh0% (1)
- Electrical Systems Transfer Function ModelsДокумент58 страницElectrical Systems Transfer Function ModelsNoor Ahmed86% (7)
- Example 7 A Voltmeter Having A Sensitivity of 1000 - U03a9 V Reads 100 V On Its 150 V - Course HeroДокумент1 страницаExample 7 A Voltmeter Having A Sensitivity of 1000 - U03a9 V Reads 100 V On Its 150 V - Course Heroanon_306267635Оценок пока нет
- Stability Analysis Using Routh-Hurwitz CriterionДокумент34 страницыStability Analysis Using Routh-Hurwitz CriterionNina ButtОценок пока нет
- Lecture 4 - Current Density, Conductors and CapacitanceДокумент34 страницыLecture 4 - Current Density, Conductors and CapacitanceHannahmhel MuanaОценок пока нет
- Advanced Engineering Math - Complex Numbers PDFДокумент17 страницAdvanced Engineering Math - Complex Numbers PDFsam nacionОценок пока нет
- Ode 2nd MathДокумент22 страницыOde 2nd MathEndalew DejeneОценок пока нет
- Time Domain Representation of Linear Time Invariant (LTI) SystemsДокумент54 страницыTime Domain Representation of Linear Time Invariant (LTI) SystemsLai Yon PengОценок пока нет
- DC Circuits: Prepared byДокумент12 страницDC Circuits: Prepared byRuth DVОценок пока нет
- Assignment 6Документ4 страницыAssignment 6Nandhalal100% (1)
- Problems Differential EquationsДокумент121 страницаProblems Differential EquationsRazes50% (4)
- Signals and Spectra QuizДокумент5 страницSignals and Spectra QuizArjayl Enriquez MartelОценок пока нет
- Inverse LaplaceДокумент33 страницыInverse LaplacePrajapati NareshОценок пока нет
- Switching Theory and Logic CircuitsДокумент159 страницSwitching Theory and Logic CircuitsnaveenОценок пока нет
- Ch1 Numerical Methods Lecture NotesДокумент10 страницCh1 Numerical Methods Lecture NotesAbdiqani Mohamed AdanОценок пока нет
- Engineering ElectromagneticsДокумент19 страницEngineering Electromagneticsأحمد دعبسОценок пока нет
- Section 4-10: Table of Laplace Transforms: Pauls Online NotesДокумент3 страницыSection 4-10: Table of Laplace Transforms: Pauls Online NotesAndrea BaltazarОценок пока нет
- MSE 481 - Quiz I SolvedДокумент2 страницыMSE 481 - Quiz I SolveddopyfuckОценок пока нет
- Mesh and Nodal AnalysisДокумент33 страницыMesh and Nodal AnalysisBenjamin Konaya Makoni100% (1)
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringДокумент18 страницSchool of Electrical Engineering and Computer Science Department of Electrical Engineeringabdullah1996Оценок пока нет
- Lecture 04 Rotational Mechanical SystemsДокумент23 страницыLecture 04 Rotational Mechanical SystemswhitevОценок пока нет
- Lecture 04 Rotational Mechanical SystemsДокумент25 страницLecture 04 Rotational Mechanical SystemsRehan BasharatОценок пока нет
- Mock Gate - 1 Ec: Group - A (One Mark Questions) 01. (D)Документ12 страницMock Gate - 1 Ec: Group - A (One Mark Questions) 01. (D)adithyagamesОценок пока нет
- Chapter 4.4 Response 2nd Order Differential EquationДокумент60 страницChapter 4.4 Response 2nd Order Differential EquationHaris Abbas QureshiОценок пока нет
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesОт EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesРейтинг: 1.5 из 5 звезд1.5/5 (2)
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesОт EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Discrete Time Signal Processing 2ed Oppenheim Solution Manual PDFДокумент474 страницыDiscrete Time Signal Processing 2ed Oppenheim Solution Manual PDFaqsaОценок пока нет
- Digital Signal Processing: Chapter 4: Sampling and ReconstructionДокумент29 страницDigital Signal Processing: Chapter 4: Sampling and ReconstructionaqsaОценок пока нет
- Lec 2 PDFДокумент71 страницаLec 2 PDFaqsaОценок пока нет
- EE 330-Digital Signal ProcessingДокумент19 страницEE 330-Digital Signal ProcessingaqsaОценок пока нет
- z-Transform Chapter 3 Digital Signal ProcessingДокумент37 страницz-Transform Chapter 3 Digital Signal ProcessingaqsaОценок пока нет
- Digital Signal Processing: Chapter 4: Sampling and ReconstructionДокумент26 страницDigital Signal Processing: Chapter 4: Sampling and ReconstructionaqsaОценок пока нет
- What is a Gear Motor? - An In-Depth GuideДокумент15 страницWhat is a Gear Motor? - An In-Depth GuidePuneet KumarОценок пока нет
- Acoplamientos DodgeДокумент60 страницAcoplamientos DodgeAlvaro Felipe CharlinОценок пока нет
- QRQC - Quick Response To Quality ControlДокумент49 страницQRQC - Quick Response To Quality ControlKshitij Bhakoo100% (4)
- Master Drive Unit: AC AC AC ACДокумент20 страницMaster Drive Unit: AC AC AC ACChristian Bedoya100% (1)
- FEM Analysis of Flashless Ring Gear Forging DiesДокумент15 страницFEM Analysis of Flashless Ring Gear Forging Diespedram khazaieОценок пока нет
- V40232 Clark C270 Torque ConverterДокумент44 страницыV40232 Clark C270 Torque ConverterRemHenry100% (4)
- PumpeДокумент14 страницPumpeMaximus MaxisОценок пока нет
- Department of Mechanical Engineering National Institute of Technology, Rourkela, Orissa, India-769 008Документ1 страницаDepartment of Mechanical Engineering National Institute of Technology, Rourkela, Orissa, India-769 008montymilkyОценок пока нет
- Catalogo de Piezas Español 644jДокумент700 страницCatalogo de Piezas Español 644jELIZBANОценок пока нет
- Joint-Site StructureFriction Welding Method As A Tool For Drive PinionДокумент7 страницJoint-Site StructureFriction Welding Method As A Tool For Drive PinionmarianechluОценок пока нет
- Tutorial 6Документ4 страницыTutorial 6ArvinОценок пока нет
- Atra 4l80e Rebuild (GM)Документ100 страницAtra 4l80e Rebuild (GM)lee fox100% (20)
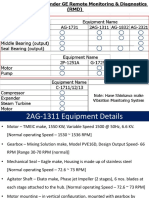
- Equipments Details - For Asset Monitoring Under RMDДокумент28 страницEquipments Details - For Asset Monitoring Under RMDhapp_dentОценок пока нет
- Gear Theory PDFДокумент18 страницGear Theory PDFAndrés OsorioОценок пока нет
- Brochure RZ 410Документ8 страницBrochure RZ 410Harris ChackoОценок пока нет
- 36S17T0 Diff - 4WD Diagnosis and Repair - REFДокумент64 страницы36S17T0 Diff - 4WD Diagnosis and Repair - REFmanahuja100% (1)
- Optimize RC pump technical documentДокумент20 страницOptimize RC pump technical documentRicardo BarrosОценок пока нет
- Am Series Air Motors: Operation and Maintenance ManualДокумент8 страницAm Series Air Motors: Operation and Maintenance ManualSuat Yiğit SayılıОценок пока нет
- Heinzmann Basic Systems E 1-F / E 2-F: Electronic Speed GovernorsДокумент51 страницаHeinzmann Basic Systems E 1-F / E 2-F: Electronic Speed GovernorsAbdallah MiidouneОценок пока нет
- Mercury 135:150:175:20:225HP XR6 Magnum II EFI Pro Max Super Magnum 90-824052R2 09:97 PDFДокумент824 страницыMercury 135:150:175:20:225HP XR6 Magnum II EFI Pro Max Super Magnum 90-824052R2 09:97 PDFRandall Petterson100% (4)
- PERT Technical Book PDFДокумент88 страницPERT Technical Book PDFLUIS ANTONIO UTRIA RINCONОценок пока нет
- Mechtex CatalogueДокумент56 страницMechtex Catalogueprashun123Оценок пока нет
- 85 - May - Gear Tooth Scoring Design Considerations PDFДокумент52 страницы85 - May - Gear Tooth Scoring Design Considerations PDFluis_dominguezeОценок пока нет
- ME3491 Course PlanДокумент9 страницME3491 Course Planmanoj1316kumar_63152Оценок пока нет
- Clutch System Component GuideДокумент420 страницClutch System Component GuideSuzuki Cardon100% (1)
- 2006 Ford GTДокумент22 страницы2006 Ford GTsharky67Оценок пока нет
- Shell Omala S2 G150 DatasheetДокумент3 страницыShell Omala S2 G150 Datasheetphankhoa83-1Оценок пока нет
- Bomba de Engranajes Catalogo JOYANGДокумент8 страницBomba de Engranajes Catalogo JOYANGlizbethdiosesОценок пока нет
- Affolter Af90+af45 enДокумент2 страницыAffolter Af90+af45 enJayakrishnaОценок пока нет
- AC Fluid Gearbox 100 DatasheetДокумент1 страницаAC Fluid Gearbox 100 DatasheetJosé JuárezОценок пока нет