Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Chemline Plastics Chemical Resistance GuideДокумент36 страницChemline Plastics Chemical Resistance GuidezazaОценок пока нет
- PLM Definition CIMData-2002Документ12 страницPLM Definition CIMData-2002zazaОценок пока нет
- MD Enclosed Disconnect Switch - MD3304XДокумент1 страницаMD Enclosed Disconnect Switch - MD3304XzazaОценок пока нет
- Giant Bicycles Bike 293Документ1 страницаGiant Bicycles Bike 293zazaОценок пока нет
- CubeDairy HECДокумент13 страницCubeDairy HECzazaОценок пока нет
- Instrumentation Symbols and IdentificationДокумент1 страницаInstrumentation Symbols and IdentificationzazaОценок пока нет
- Going With The Flow With Inventor® Tube & Pipe: Learning ObjectivesДокумент35 страницGoing With The Flow With Inventor® Tube & Pipe: Learning ObjectivesBemvilac BritoОценок пока нет
- Sap Fico TutorialДокумент191 страницаSap Fico TutorialVicky Memon100% (1)
- Unit 8 QuizДокумент3 страницыUnit 8 QuizzazaОценок пока нет
- F0070 TDMДокумент1 страницаF0070 TDMzazaОценок пока нет
- 30-722-15 A2015 W01 - PublicДокумент10 страниц30-722-15 A2015 W01 - PubliczazaОценок пока нет
- 4824 Kimbrell-4824 TherrienДокумент25 страниц4824 Kimbrell-4824 TherrienzazaОценок пока нет
- S UserДокумент1 страницаS UserzazaОценок пока нет
- Sch40 PVC 8-27-12Документ18 страницSch40 PVC 8-27-12zazaОценок пока нет
- Going With The Flow With Inventor® Tube & Pipe: Learning ObjectivesДокумент35 страницGoing With The Flow With Inventor® Tube & Pipe: Learning ObjectivesBemvilac BritoОценок пока нет
- Pip PIC001Документ32 страницыPip PIC001Gerry100% (1)
- Manual Pressure Pipe CDNДокумент82 страницыManual Pressure Pipe CDNzazaОценок пока нет
- Ip Pressure Transmitter Hook Up Drawing PDFДокумент1 страницаIp Pressure Transmitter Hook Up Drawing PDFAhmedОценок пока нет
- Elcgl01d 1102Документ10 страницElcgl01d 1102danorcОценок пока нет
- How To Get The Target Id of Your MachineДокумент2 страницыHow To Get The Target Id of Your Machinesaputro123Оценок пока нет
- SSG - Blip - Iso 14306 JT v1Документ4 страницыSSG - Blip - Iso 14306 JT v1zazaОценок пока нет
- 1.1.1 ISO STEP Express IntroДокумент53 страницы1.1.1 ISO STEP Express IntrozazaОценок пока нет
- 1.1.1 ISO STEP Express IntroДокумент53 страницы1.1.1 ISO STEP Express IntrozazaОценок пока нет
- Manual Pressure Pipe CDNДокумент82 страницыManual Pressure Pipe CDNzazaОценок пока нет
- 10-06 SolidWorks API DemystifiedДокумент37 страниц10-06 SolidWorks API DemystifiedloretoОценок пока нет
- JobAid - Cash2CashДокумент1 страницаJobAid - Cash2CashzazaОценок пока нет
- 4401 Lilla-4401 BrigdenДокумент44 страницы4401 Lilla-4401 BrigdenzazaОценок пока нет
- 6533 1Документ23 страницы6533 1Er Ravinder Reddy DevireddyОценок пока нет
- Introduction Game: User: Password: ToДокумент2 страницыIntroduction Game: User: Password: TozazaОценок пока нет
- 4023 Lilla-4023 SetzerДокумент60 страниц4023 Lilla-4023 SetzerzazaОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Types of Excitation SystemДокумент13 страницTypes of Excitation SystemRohit Akiwatkar33% (3)
- Mex 21302Документ38 страницMex 21302Yousef Adel HassanenОценок пока нет
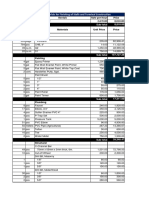
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionДокумент2 страницы3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezОценок пока нет
- 1.6 66 77 2.0 105 110 135 KW TDI CR EngineДокумент397 страниц1.6 66 77 2.0 105 110 135 KW TDI CR EngineRSTОценок пока нет
- 800 ZCC9800W Catalogue Cummins BenzДокумент22 страницы800 ZCC9800W Catalogue Cummins BenzPhúc Linh NguyễnОценок пока нет
- N A GockcenДокумент12 страницN A GockcendolkeenОценок пока нет
- CE 579 Lecture 6 Stability - Differential Equations-TorsionДокумент16 страницCE 579 Lecture 6 Stability - Differential Equations-TorsionbsitlerОценок пока нет
- Physics FormulasДокумент4 страницыPhysics FormulasMica :pОценок пока нет
- Dbatu Scheme - New & OldДокумент9 страницDbatu Scheme - New & OldDeepak BhopeОценок пока нет
- Reliable Institute DPP of Maths Circles and ST LineДокумент15 страницReliable Institute DPP of Maths Circles and ST LinePrakhar BansalОценок пока нет
- Anchor BoltsДокумент1 страницаAnchor BoltsBert EngОценок пока нет
- Testing and Adjusting: Troubleshooting Problem ListДокумент101 страницаTesting and Adjusting: Troubleshooting Problem ListJose DarioОценок пока нет
- 7MMVWC310YW11Документ8 страниц7MMVWC310YW11Relavson RefaccionesОценок пока нет
- Lock-O-Ring FlangeДокумент6 страницLock-O-Ring FlangeAm EОценок пока нет
- Ervice Arts IST: 16D2149 P T D S LCB 13150 P S F CДокумент16 страницErvice Arts IST: 16D2149 P T D S LCB 13150 P S F Cjasmin selimić100% (3)
- BRS Manual Rev 4-10Документ38 страницBRS Manual Rev 4-10RondrashОценок пока нет
- Gabion SlopeStabilityДокумент30 страницGabion SlopeStabilityverzana100% (2)
- Piston Rings GuideДокумент5 страницPiston Rings GuideAshok BishtОценок пока нет
- 530 - Dryers ManualДокумент4 страницы530 - Dryers ManualmecambОценок пока нет
- Lecture11c - Basic Gaslift Sec 3 - Opening and Closing and TRO Pressure CalculationДокумент36 страницLecture11c - Basic Gaslift Sec 3 - Opening and Closing and TRO Pressure Calculationreborn2100% (4)
- Martillo Hyd Atlas Copco SB 150Документ12 страницMartillo Hyd Atlas Copco SB 150Nain murilloОценок пока нет
- Gujarat Technological UniversityДокумент2 страницыGujarat Technological UniversityMaulik PatelОценок пока нет
- 05-Vl996 Vista Series-A4 2010 Intl Application GuideДокумент4 страницы05-Vl996 Vista Series-A4 2010 Intl Application GuideJuan SuarezОценок пока нет
- A2 MECH Momentum QuestionsДокумент8 страницA2 MECH Momentum Questionsfootball_frenzy_2004Оценок пока нет
- CFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12Документ11 страницCFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12puthenkulamОценок пока нет
- 125 Series Diesel: ConvertibleДокумент2 страницы125 Series Diesel: ConvertibleLuis Alberto Serrano MesaОценок пока нет
- MM PT6T-3B 72-3Документ24 страницыMM PT6T-3B 72-3Panca Xp100% (1)
- PET 332 E Production Engineering & Surface FacilitiesДокумент13 страницPET 332 E Production Engineering & Surface Facilities000Оценок пока нет
- 2002 KX250 Race TuningДокумент4 страницы2002 KX250 Race TuningKidKawie100% (1)