Вам также может понравиться
- MSIM 602 Simulation Fundamentals AssignmentДокумент2 страницыMSIM 602 Simulation Fundamentals Assignmentahaque08Оценок пока нет
- Calibre xRC Parasitic Extraction Student WorkbookДокумент14 страницCalibre xRC Parasitic Extraction Student WorkbookBai Nguyen NoiОценок пока нет
- Clock Network Synthesis Optimization TechniquesДокумент22 страницыClock Network Synthesis Optimization TechniquesKu Mar Sa Ndesh100% (1)
- Cooperative Synchronization in Distributed Microgrid Control-Springer International Publishing (2 PDFДокумент250 страницCooperative Synchronization in Distributed Microgrid Control-Springer International Publishing (2 PDFASHISHОценок пока нет
- Analytics at WorkДокумент19 страницAnalytics at WorkRishabh MauryaОценок пока нет
- Integrate UI5 Application With NWBCДокумент19 страницIntegrate UI5 Application With NWBCpankajssharmaОценок пока нет
- INF1511 MemoДокумент3 страницыINF1511 Memoclaudz100% (1)
- Understanding About CMOS Fabrication TechnologyДокумент4 страницыUnderstanding About CMOS Fabrication TechnologyJayesh RaghuwanshiОценок пока нет
- VLSIДокумент43 страницыVLSIGuruKPOОценок пока нет
- Continuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthДокумент12 страницContinuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthAshraf DeenОценок пока нет
- EECS 150 - RTL Design Optimization for Digital SystemsДокумент40 страницEECS 150 - RTL Design Optimization for Digital SystemsPrabhu_gudimaneОценок пока нет
- Considerations For Writing UPF For A Hierarchical Flow: Scope vs. HierarchyДокумент9 страницConsiderations For Writing UPF For A Hierarchical Flow: Scope vs. HierarchymanojkumarОценок пока нет
- BabaДокумент2 страницыBabaakshaypagariyaОценок пока нет
- VHDL PDFДокумент112 страницVHDL PDFvivek patelОценок пока нет
- Single-Mask Double-Patterning Lithography BenefitsДокумент21 страницаSingle-Mask Double-Patterning Lithography BenefitsRenju TjОценок пока нет
- VLSI NOTES (Writennotes)Документ247 страницVLSI NOTES (Writennotes)Physical DesignОценок пока нет
- Network Theory FormulasДокумент24 страницыNetwork Theory FormulasManish KushwahaОценок пока нет
- Introduction To VHDLДокумент88 страницIntroduction To VHDLpusd_90Оценок пока нет
- Research Notes On VlsiДокумент70 страницResearch Notes On VlsiMohit GirdharОценок пока нет
- Scan Chain ReorderДокумент48 страницScan Chain ReorderPrasanna KumarОценок пока нет
- Starrc DsДокумент7 страницStarrc DsNishanth BaratamОценок пока нет
- WCNДокумент102 страницыWCNVinaY ChowdaryОценок пока нет
- Layout Lec 04 Techniques v01Документ76 страницLayout Lec 04 Techniques v01Ahmed MetwalyОценок пока нет
- 1.FPGA Design Flow Processes PropertiesДокумент5 страниц1.FPGA Design Flow Processes Propertiesmachnik1486624Оценок пока нет
- 2015.06 Router ICV Incremental TrainingДокумент63 страницы2015.06 Router ICV Incremental TrainingmanojkumarОценок пока нет
- ARM ArchitectureДокумент6 страницARM ArchitectureCarlos AraujoОценок пока нет
- Vector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsДокумент206 страницVector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsLakshman YandapalliОценок пока нет
- Modified Dual-Coupled Linear Congruential Generator Based Pseudorandom Bit GeneratorДокумент11 страницModified Dual-Coupled Linear Congruential Generator Based Pseudorandom Bit GeneratorGanesamoorthy BОценок пока нет
- Optoelectronic Detectors: OutlineДокумент54 страницыOptoelectronic Detectors: OutlineShivam TiwariОценок пока нет
- Zynq 7020Документ4 страницыZynq 7020NGUYỄN HOÀNG LINHОценок пока нет
- Introduction to Extraction and Custom Cell DesignДокумент9 страницIntroduction to Extraction and Custom Cell DesignRAZОценок пока нет
- QRC Extraction DsДокумент5 страницQRC Extraction DsLakshman YandapalliОценок пока нет
- Vlsi Design Verification and Testing Lecture1Документ22 страницыVlsi Design Verification and Testing Lecture1Thi NguyenОценок пока нет
- Understanding The UPF Power Domain and Domain Boundary - Mentor GraphicsДокумент15 страницUnderstanding The UPF Power Domain and Domain Boundary - Mentor GraphicsmanojkumarОценок пока нет
- Interconnect Noise Optimization in Nanometer TechnologiesДокумент145 страницInterconnect Noise Optimization in Nanometer TechnologiesSmile NagsОценок пока нет
- Digital Soc Synthesis, Sta, FV and EcoДокумент2 страницыDigital Soc Synthesis, Sta, FV and EcoEnoch L SОценок пока нет
- Ee 215 AДокумент8 страницEe 215 AArjun Singhal100% (1)
- Fpga Programming Using Verilog HDL LanguageДокумент89 страницFpga Programming Using Verilog HDL LanguageSidhartha Sankar Rout0% (1)
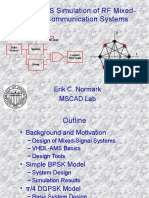
- Eric Thesis SlidesДокумент43 страницыEric Thesis SlidesHumberto JuniorОценок пока нет
- Low Power Techniques For VLSI DesignДокумент6 страницLow Power Techniques For VLSI DesignjainatinОценок пока нет
- Latches&FlipflopsДокумент20 страницLatches&FlipflopsAjay G Bellam100% (1)
- Resistor Design Manual OutlineДокумент89 страницResistor Design Manual Outlineece thesisОценок пока нет
- Low Power Vlsi Design1Документ23 страницыLow Power Vlsi Design1Shruthi GourishettiОценок пока нет
- ASIC-System On Chip-VLSI Design - Clock GatingДокумент4 страницыASIC-System On Chip-VLSI Design - Clock Gatinguni_saraОценок пока нет
- Case Study of Complex Full Chip Low Power Implementation in 16nm NodeДокумент32 страницыCase Study of Complex Full Chip Low Power Implementation in 16nm NodemanojkumarОценок пока нет
- Me Maths ModelДокумент2 страницыMe Maths ModelJagan RajendiranОценок пока нет
- DDR SdramДокумент36 страницDDR Sdramajmalpm333Оценок пока нет
- Pulsed Latch Timing Analysis: Product Version: Tempus 15.1 October, 2015Документ21 страницаPulsed Latch Timing Analysis: Product Version: Tempus 15.1 October, 2015Anshita AgarwalОценок пока нет
- Signal and Design Integrity IssuesДокумент56 страницSignal and Design Integrity IssuesJyothi Nath100% (1)
- EE 658 Lecture 1: Introduction to Testing of Digital CircuitsДокумент112 страницEE 658 Lecture 1: Introduction to Testing of Digital CircuitsAmandeep VaishОценок пока нет
- Timing Aware Dummy Metal Fill MethodologyДокумент3 страницыTiming Aware Dummy Metal Fill MethodologyraveneyesdeadОценок пока нет
- Place & Route Tutorial #1: I. SetupДокумент13 страницPlace & Route Tutorial #1: I. SetupDurgaPrasadОценок пока нет
- PD FlowДокумент6 страницPD FlowUTtОценок пока нет
- Placement and RoutingДокумент40 страницPlacement and RoutingrajiОценок пока нет
- TRADITIONAL Asic Design FlowДокумент24 страницыTRADITIONAL Asic Design FlowTarun Prasad100% (1)
- EE3411 EM-II Lab Manual FinalДокумент71 страницаEE3411 EM-II Lab Manual FinalManoj KumarОценок пока нет
- Built-In Self-Test (BIST)Документ59 страницBuilt-In Self-Test (BIST)Thi NguyenОценок пока нет
- ECE 5263 Digital VLSI Design Document on I/O PadsДокумент5 страницECE 5263 Digital VLSI Design Document on I/O PadsKislay AnandОценок пока нет
- IEEE Floating Point Multiplier VerilogДокумент19 страницIEEE Floating Point Multiplier VerilogSakthi Velan0% (1)
- LOwpower Verification For UVMДокумент1 страницаLOwpower Verification For UVMThi NguyenОценок пока нет
- Clock Dividers Made EasyДокумент25 страницClock Dividers Made Easykumarbsnsp100% (2)
- VHDL BRAM and ROM ExamplesДокумент9 страницVHDL BRAM and ROM ExamplesGmit MandyaОценок пока нет
- P1 IntroДокумент35 страницP1 IntroPARTHA BANERJEEОценок пока нет
- EC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshДокумент56 страницEC 614: Adaptive Signal Processing Techniques: Course Instructor: Dr. Debashis GhoshUtkarsh GuptaОценок пока нет
- Data warehouse roles of education in delivery and mining systemsДокумент4 страницыData warehouse roles of education in delivery and mining systemskiet eduОценок пока нет
- GHG Protocol Guidance for Assessing Emissions from ICT Products and ServicesДокумент6 страницGHG Protocol Guidance for Assessing Emissions from ICT Products and ServicesNikhil AnandОценок пока нет
- Java Foundations CourseДокумент3 страницыJava Foundations CourseJim DelgadoОценок пока нет
- Operational GuideДокумент55 страницOperational GuidehossainmzОценок пока нет
- Lecture 11 Unsupervised LearningДокумент19 страницLecture 11 Unsupervised LearningHodatama Karanna OneОценок пока нет
- Syntax AnalysisДокумент115 страницSyntax AnalysisPavan KumarОценок пока нет
- Referral and Record Keeping: Beringuel, Christian JosephДокумент5 страницReferral and Record Keeping: Beringuel, Christian JosephChristian Joseph Beringuel NietesОценок пока нет
- IPF NextLifter InstructionsДокумент25 страницIPF NextLifter Instructionsema94mayОценок пока нет
- IGCSE Matrices Index:: Please Click On The Question Number You WantДокумент17 страницIGCSE Matrices Index:: Please Click On The Question Number You WantNad HsОценок пока нет
- Creating Interactive OLAP Applications With MySQL Enterprise and MondrianДокумент37 страницCreating Interactive OLAP Applications With MySQL Enterprise and MondrianOleksiy Kovyrin100% (10)
- MillionДокумент488 страницMillionSandruka AnzutlОценок пока нет
- Spooky2 User's Guide 20170204 PDFДокумент228 страницSpooky2 User's Guide 20170204 PDFAndi OlivierОценок пока нет
- Emtech ReviewerДокумент3 страницыEmtech Reviewerjames BernalОценок пока нет
- Tn179 05 PDFДокумент517 страницTn179 05 PDFchimbwaОценок пока нет
- Unit 5Документ21 страницаUnit 5charulatha.kannnanОценок пока нет
- QRS LaserJet Printers 07-28-2014Документ8 страницQRS LaserJet Printers 07-28-2014theBAUОценок пока нет
- File - 884729453 - 1694060717 - Stack&queue 10 MCQДокумент3 страницыFile - 884729453 - 1694060717 - Stack&queue 10 MCQRakesh SОценок пока нет
- Year 3 Hass Geography and Digital Tech Imovie Rubric RedactedДокумент1 страницаYear 3 Hass Geography and Digital Tech Imovie Rubric Redactedapi-327938582Оценок пока нет
- CounterACT Console User Manual 7.0.0 PDFДокумент763 страницыCounterACT Console User Manual 7.0.0 PDFlazarusОценок пока нет
- EDD HA 06 General Information enДокумент29 страницEDD HA 06 General Information enMarcelo AvalosОценок пока нет
- Pei-Bai Zhou - Numerical Analysis of Electromagnetic FieldsДокумент418 страницPei-Bai Zhou - Numerical Analysis of Electromagnetic FieldsTienRienОценок пока нет
- Properties of Trigonometric FunctionsДокумент9 страницProperties of Trigonometric FunctionsMarie Carolaine FameroОценок пока нет
- ORF 4 User Manual V 1.0Документ23 страницыORF 4 User Manual V 1.02005590% (1)
- Experian Dispute FormДокумент1 страницаExperian Dispute Formmainester100% (3)
- Microsoft Dynamics Ax 2012 Retail PerformanceДокумент67 страницMicrosoft Dynamics Ax 2012 Retail PerformanceDao Van HangОценок пока нет