Вам также может понравиться
- Chapter 3-Open Loop DC Motor ControlДокумент52 страницыChapter 3-Open Loop DC Motor ControlBoughiout Islam abd elsammedОценок пока нет
- Elektrikle Tahrik Temel Bilgiler: Waveforms and DefinitionsДокумент22 страницыElektrikle Tahrik Temel Bilgiler: Waveforms and DefinitionsErdiner ParmaksızОценок пока нет
- Speed Control of DC MotorsДокумент21 страницаSpeed Control of DC MotorsTe NgОценок пока нет
- 1D Steady State Conduction: Heat TransferДокумент4 страницы1D Steady State Conduction: Heat TransferDhamwasu TrisarnwadhanaОценок пока нет
- DC Motor - Drive 2019Документ80 страницDC Motor - Drive 2019ali ramadanОценок пока нет
- Dcmachine P2Документ30 страницDcmachine P2Abhaya RanawakaОценок пока нет
- DSPFirst L05A pp4Документ4 страницыDSPFirst L05A pp4Belkız Nur BayramОценок пока нет
- D.C. Motor Notes - 15.02.2022 - UpdatedДокумент132 страницыD.C. Motor Notes - 15.02.2022 - Updatedronaldeen21Оценок пока нет
- Chapter 6 - Induction Motor (Steady State)Документ27 страницChapter 6 - Induction Motor (Steady State)arifulОценок пока нет
- 10-Waveform Generator Using OpAmpДокумент4 страницы10-Waveform Generator Using OpAmpAquariusОценок пока нет
- Waveform Generator Using OpAmpДокумент4 страницыWaveform Generator Using OpAmpLevingstan YesudhasОценок пока нет
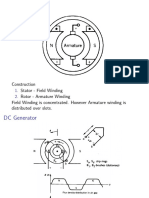
- Pertemuan Ii DC GeneratorsДокумент21 страницаPertemuan Ii DC Generatorswolestod1Оценок пока нет
- CH 05Документ23 страницыCH 05Alexaa AОценок пока нет
- Tema 2 CA - CCДокумент22 страницыTema 2 CA - CCabelinowОценок пока нет
- Harmonic Reduction For Broadband Helix Twts With Negative DispersionДокумент2 страницыHarmonic Reduction For Broadband Helix Twts With Negative DispersionRaktim GuhaОценок пока нет
- Locked-Rotor In-Rush CurrentДокумент10 страницLocked-Rotor In-Rush CurrentmanthuОценок пока нет
- DT T Q Ka DX R: 1D Steady State ConductionДокумент4 страницыDT T Q Ka DX R: 1D Steady State ConductionDhamwasu TrisarnwadhanaОценок пока нет
- MeetingДокумент34 страницыMeetingtj.lin1024Оценок пока нет
- Locked Rotor CalculationsДокумент10 страницLocked Rotor Calculationssam_al_gino375Оценок пока нет
- DC - Motor - Speed ControlДокумент27 страницDC - Motor - Speed ControlSPARSH RAJОценок пока нет
- Chapter 5 - Angle ModulationДокумент41 страницаChapter 5 - Angle ModulationIBRAHIM ALFARISОценок пока нет
- Quantity: - A) - %sin 2/4-Sin 24)Документ4 страницыQuantity: - A) - %sin 2/4-Sin 24)Krutideepa BeheraОценок пока нет
- 03 Power SCD 1Документ85 страниц03 Power SCD 1riajulОценок пока нет
- Voltage Builup in Shunt GeneratorДокумент3 страницыVoltage Builup in Shunt Generatorm_mustaqeemОценок пока нет
- RectifiersДокумент27 страницRectifiersDaniel KetemawОценок пока нет
- EE8552 Unit-5Документ48 страницEE8552 Unit-5balafetОценок пока нет
- EE182221 DC Machines Ep4 UploadДокумент8 страницEE182221 DC Machines Ep4 UploadWarayut KampeerawatОценок пока нет
- Induction Motor - Scalar Control-1Документ20 страницInduction Motor - Scalar Control-1parulian sebpriadi hutabaratОценок пока нет
- 4 TheveninsДокумент20 страниц4 Theveninsgeorge manОценок пока нет
- T Intersection Point (T T) Determines The Steady - State SpeedДокумент11 страницT Intersection Point (T T) Determines The Steady - State SpeedKaone OsupileОценок пока нет
- Open Circuit Characteristics of DC Shunt GeneratorДокумент6 страницOpen Circuit Characteristics of DC Shunt GeneratorBalagam RupaОценок пока нет
- Lecture DC MachinesДокумент40 страницLecture DC MachinesPrathap VuyyuruОценок пока нет
- Transformer DesignДокумент26 страницTransformer DesignVinay KumarОценок пока нет
- L-4 (DK) (Pe) ( (Ee) Nptel) 4Документ5 страницL-4 (DK) (Pe) ( (Ee) Nptel) 4GagneОценок пока нет
- P436 Lect 13Документ20 страницP436 Lect 13Zhenhua HuangОценок пока нет
- Full-Wave Rectifier - VerstudДокумент26 страницFull-Wave Rectifier - VerstudLIEW HUI FANG UNIMAPОценок пока нет
- Electrical Machines EE-260: Instructor: DR Mehmood AlamДокумент30 страницElectrical Machines EE-260: Instructor: DR Mehmood AlamSaif Ur RehmanОценок пока нет
- Synchronous MachinesДокумент53 страницыSynchronous MachinesPhilip IsholaОценок пока нет
- Heaswring Points and Instruments: U-V, V-W W-U I WZZДокумент1 страницаHeaswring Points and Instruments: U-V, V-W W-U I WZZWilliam moreОценок пока нет
- Control of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoreДокумент20 страницControl of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoremayajogiОценок пока нет
- Polyphase Induction Machines: Principle of OperationДокумент10 страницPolyphase Induction Machines: Principle of OperationPrakash KumarОценок пока нет
- EE 456 Synchronous GeneratorsДокумент15 страницEE 456 Synchronous GeneratorsFengxing ZhuОценок пока нет
- Physics 50 Equation SheetДокумент2 страницыPhysics 50 Equation Sheetimehkingsley26Оценок пока нет
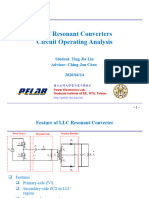
- I. Series Resonant Converter:: C L N: NДокумент10 страницI. Series Resonant Converter:: C L N: NCatlin KaraОценок пока нет
- EMTP-RV TRV-SWTДокумент31 страницаEMTP-RV TRV-SWTboopathivpОценок пока нет
- EE-260 Lecture 09, 10 TransformerДокумент40 страницEE-260 Lecture 09, 10 TransformerUmair NaeemОценок пока нет
- 01 Fundtls and WaveshapingДокумент29 страниц01 Fundtls and WaveshapingFrancisОценок пока нет
- AC Circuits IДокумент38 страницAC Circuits IKeithОценок пока нет
- SJPW-T4-Sanken Diodo de DronДокумент6 страницSJPW-T4-Sanken Diodo de DronIvan ZuñigaОценок пока нет
- Three Phse SycronizeДокумент14 страницThree Phse SycronizeEden HazardОценок пока нет
- Vector Control of IMДокумент62 страницыVector Control of IMsajs201100% (9)
- Synchronous K-NotesДокумент11 страницSynchronous K-Notesomkar budigeОценок пока нет
- Ch-2 - Sinusoidal Oscillator HJHДокумент8 страницCh-2 - Sinusoidal Oscillator HJHyeasirarafat941Оценок пока нет
- DC MachinesДокумент46 страницDC MachinesAung NetflixОценок пока нет
- 1.6 Real Single-Phase Transformer.: DT D eДокумент37 страниц1.6 Real Single-Phase Transformer.: DT D eRamez MezОценок пока нет
- Single Phase and Three Phase Rectifiers NumericalsДокумент71 страницаSingle Phase and Three Phase Rectifiers Numericalsaryan singhОценок пока нет
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2От EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Оценок пока нет
- HW1Документ1 страницаHW1Anonymous AFFiZnОценок пока нет
- 10.1007/978 3 642 36321 4Документ767 страниц10.1007/978 3 642 36321 4Anonymous AFFiZnОценок пока нет
- Usage Simulation ManДокумент13 страницUsage Simulation ManAnonymous AFFiZnОценок пока нет
- HW2Документ1 страницаHW2Anonymous AFFiZnОценок пока нет
- Limitations Imposed by RHP Zeros/Poles in Multivariable SystemsДокумент6 страницLimitations Imposed by RHP Zeros/Poles in Multivariable SystemsAnonymous AFFiZnОценок пока нет
- Course Mat BestДокумент2 страницыCourse Mat BestAnonymous AFFiZnОценок пока нет
- Fuzzy-Pid Based Performance Analysis of DC MotorДокумент8 страницFuzzy-Pid Based Performance Analysis of DC MotorAnonymous AFFiZnОценок пока нет
- SoftwareДокумент1 страницаSoftwareAnonymous AFFiZnОценок пока нет
- 2014 Reconfig TorqueДокумент6 страниц2014 Reconfig TorqueAnonymous AFFiZnОценок пока нет
- Area of Research and Applicant Profile Form: FundingДокумент4 страницыArea of Research and Applicant Profile Form: FundingAnonymous AFFiZnОценок пока нет
- Privacy-Optimal Strategies For Smart Metering Systems With A Rechargeable BatteryДокумент51 страницаPrivacy-Optimal Strategies For Smart Metering Systems With A Rechargeable BatteryAnonymous AFFiZnОценок пока нет
- CCOVERДокумент1 страницаCCOVERAnonymous AFFiZnОценок пока нет
- EE106b Project Overview and Rubric: 1 Due DatesДокумент3 страницыEE106b Project Overview and Rubric: 1 Due DatesAnonymous AFFiZnОценок пока нет
- Decentralized Stochastic Control: Aditya MahajanДокумент50 страницDecentralized Stochastic Control: Aditya MahajanAnonymous AFFiZnОценок пока нет
- EE106b Project Ideas: 1 GuidelinesДокумент3 страницыEE106b Project Ideas: 1 GuidelinesAnonymous AFFiZnОценок пока нет
- Active Learning: R W RevansДокумент3 страницыActive Learning: R W RevansAnonymous AFFiZnОценок пока нет
- Double 3D Pendulum Model Features: - The Lower Body Is An Axially Symmetric Rigid LinkДокумент2 страницыDouble 3D Pendulum Model Features: - The Lower Body Is An Axially Symmetric Rigid LinkAnonymous AFFiZnОценок пока нет
- Dynamics and Control of A 3D Pendulum: Jinglais, Asanyal, Nalin, Dsbaero, NHM @engin - Umich.eduДокумент6 страницDynamics and Control of A 3D Pendulum: Jinglais, Asanyal, Nalin, Dsbaero, NHM @engin - Umich.eduAnonymous AFFiZnОценок пока нет
- Learning Theories Multiple IntelligencesДокумент5 страницLearning Theories Multiple IntelligencesAnonymous AFFiZnОценок пока нет
- 4971c en PDFДокумент44 страницы4971c en PDFdinhvuОценок пока нет
- EXPRODДокумент4 страницыEXPRODRuliОценок пока нет
- PSC100-150 Datenblatt - DC-DC Wandler Polyamp - 01.2017Документ8 страницPSC100-150 Datenblatt - DC-DC Wandler Polyamp - 01.2017valentin IlievОценок пока нет
- Izgradnja Postrojenja I Proizvodnja Električne Energije U Solarnim Elektranama - Detaljan Vodič - 0Документ102 страницыIzgradnja Postrojenja I Proizvodnja Električne Energije U Solarnim Elektranama - Detaljan Vodič - 0Дејан КнежевићОценок пока нет
- Literature Review of PV Panel EmulatorДокумент12 страницLiterature Review of PV Panel EmulatorEsala Hirumal SenevirathneОценок пока нет
- Understanding The Behavior of ExciterДокумент4 страницыUnderstanding The Behavior of Exciterschauhan12Оценок пока нет
- Electrical Safety Policy ChecklistДокумент2 страницыElectrical Safety Policy ChecklistSugun Kumar PedapudiОценок пока нет
- AC Voltage (V) #61-340 #61-342 Ranges & Accuracies: Digital Multimeter Instruction ManualДокумент6 страницAC Voltage (V) #61-340 #61-342 Ranges & Accuracies: Digital Multimeter Instruction Manualtallerleo551Оценок пока нет
- LS Drive Series - E - 1904Документ16 страницLS Drive Series - E - 1904Mohd Abu AjajОценок пока нет
- 30 Erz C32ek271yДокумент6 страниц30 Erz C32ek271yoliver bienОценок пока нет
- Installation Operation Maintenance Technical Instruction: Medium Voltage DistributionДокумент28 страницInstallation Operation Maintenance Technical Instruction: Medium Voltage Distributionsilviolima34Оценок пока нет
- True Power ProductsДокумент8 страницTrue Power ProductsDurban Chamber of Commerce and IndustryОценок пока нет
- Regen Drive UK PDFДокумент2 страницыRegen Drive UK PDFAliRouyouОценок пока нет
- CBT 1 - CBT HДокумент4 страницыCBT 1 - CBT HDarwin Canchari VillcaraniОценок пока нет
- Cat Generator PDFДокумент64 страницыCat Generator PDFmarkigldmm918100% (2)
- Diagnostic Display Unit: Operator'S GuideДокумент34 страницыDiagnostic Display Unit: Operator'S Guidetest1234Оценок пока нет
- Itm - Codigos SiemensДокумент234 страницыItm - Codigos SiemensSantiago FarfanОценок пока нет
- Well PumpsДокумент20 страницWell PumpsJuan Camilo Tejada OrjuelaОценок пока нет
- MVB 56 Manual PDFДокумент4 страницыMVB 56 Manual PDFdwОценок пока нет
- 380/115 KV DHAHIYA BSP Annexure-I LV Ac Cable Sizing and Ampacity CalculationsДокумент16 страниц380/115 KV DHAHIYA BSP Annexure-I LV Ac Cable Sizing and Ampacity CalculationsSomnath DasОценок пока нет
- 15XW 1c, 25kV, 260mil XLP (100%), WS, PVC6871 PDFДокумент2 страницы15XW 1c, 25kV, 260mil XLP (100%), WS, PVC6871 PDFLuis MartinezОценок пока нет
- Tanesco Tanzania - Specification S24 MV Load Break Fuse Cutouts With Arc Chutes (2000)Документ42 страницыTanesco Tanzania - Specification S24 MV Load Break Fuse Cutouts With Arc Chutes (2000)Anonymous AoUv7Gz100% (1)
- FF-Alarm SRДокумент11 страницFF-Alarm SRLê ĐứcОценок пока нет
- EMC Data Sheet Variable Speed DriveДокумент24 страницыEMC Data Sheet Variable Speed Drivehafid ganeshaОценок пока нет
- Basic ElectricalsДокумент123 страницыBasic Electricalskarunarathnej7970Оценок пока нет
- Printed by SYSUSER: Dial Toll Free 1912 For Bill & Supply ComplaintsДокумент1 страницаPrinted by SYSUSER: Dial Toll Free 1912 For Bill & Supply ComplaintsGaurav SharmaОценок пока нет
- How To Apply For Elect ConnДокумент127 страницHow To Apply For Elect ConnmonologyОценок пока нет
- r4850g2 Rectifier Data Sheet 05Документ2 страницыr4850g2 Rectifier Data Sheet 05Eduardo CastellonОценок пока нет
- E. Nagaiah ResumeДокумент3 страницыE. Nagaiah ResumeRajendra Singh PariharОценок пока нет
- Modulos Familia MoellerДокумент61 страницаModulos Familia Moellermagwolff86Оценок пока нет