Вам также может понравиться
- Proyectofrances2idiomaceipav2012 120320112443 Phpapp02Документ22 страницыProyectofrances2idiomaceipav2012 120320112443 Phpapp02Edwison Cenestant DésirОценок пока нет
- Aparatos de Medicion LinkДокумент1 страницаAparatos de Medicion LinkEdwison Cenestant DésirОценок пока нет
- Proyectofrances2idiomaceipav2012 120320112443 Phpapp02Документ22 страницыProyectofrances2idiomaceipav2012 120320112443 Phpapp02Edwison Cenestant DésirОценок пока нет
- Proyectofrances2idiomaceipav2012 120320112443 Phpapp02Документ22 страницыProyectofrances2idiomaceipav2012 120320112443 Phpapp02Edwison Cenestant DésirОценок пока нет
- LM311Документ5 страницLM311Edwison Cenestant DésirОценок пока нет
- Sustentación TesisДокумент46 страницSustentación TesisEdwison Cenestant DésirОценок пока нет
- ResumenДокумент15 страницResumenEdwison Cenestant DésirОценок пока нет
- Proyectos InovacionДокумент96 страницProyectos Inovaciongasifu250% (2)
- Proyectos InovacionДокумент96 страницProyectos Inovaciongasifu250% (2)
- DATOSДокумент7 страницDATOSEdwison Cenestant DésirОценок пока нет
- SugerenciasДокумент1 страницаSugerenciasEdwison Cenestant DésirОценок пока нет
- Compactadora de latas de aluminioДокумент3 страницыCompactadora de latas de aluminioEdwison Cenestant DésirОценок пока нет
- ResumenДокумент15 страницResumenEdwison Cenestant DésirОценок пока нет
- Test de nivel francés completoДокумент3 страницыTest de nivel francés completojose0% (1)
- Estructura Del AnteproyectoДокумент1 страницаEstructura Del AnteproyectoEdwison Cenestant DésirОценок пока нет
- Cómo Conectar en Red Computadoras Con Un Cable SerialДокумент2 страницыCómo Conectar en Red Computadoras Con Un Cable SerialEdwison Cenestant DésirОценок пока нет
- Qué Es LabviewДокумент6 страницQué Es LabviewPaola Siomara DelgadoОценок пока нет
- Cuestionario de Profibus Carlos PichardoДокумент1 страницаCuestionario de Profibus Carlos PichardoEdwison Cenestant DésirОценок пока нет
- Elaboración e Interpretación de Plano Instrumental Aplicando Las NormasДокумент22 страницыElaboración e Interpretación de Plano Instrumental Aplicando Las NormasEdwison Cenestant DésirОценок пока нет
- Cable CoaxialДокумент8 страницCable CoaxialEdwison Cenestant DésirОценок пока нет
- CD 0844Документ145 страницCD 0844Miguel SPОценок пока нет
- GrafcetДокумент1 страницаGrafcetEdwison Cenestant DésirОценок пока нет
- PLC: Prácticas de compuertas lógicas y semáforoДокумент12 страницPLC: Prácticas de compuertas lógicas y semáforoEdwison Cenestant DésirОценок пока нет
- Introducción A Entorno de Diseño LabviewДокумент82 страницыIntroducción A Entorno de Diseño LabviewHugoBarceaОценок пока нет
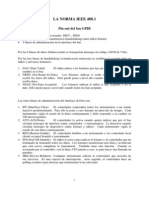
- Norma 488Документ5 страницNorma 488aceeventuraОценок пока нет
- Curso LabView PDFДокумент69 страницCurso LabView PDFEdwison Cenestant DésirОценок пока нет
- HorarioДокумент5 страницHorarioEdwison Cenestant DésirОценок пока нет
- Solu Ejem 7Документ21 страницаSolu Ejem 7Maribel Sanchez HenestrosaОценок пока нет
- Img 20180408 0001Документ7 страницImg 20180408 0001Edwison Cenestant DésirОценок пока нет
- Uso de Animales en La ExperimentaciónДокумент3 страницыUso de Animales en La ExperimentaciónMelissa RomeroОценок пока нет
- SESION Comunicación 1er GradoДокумент2 страницыSESION Comunicación 1er Gradomariana0112100% (3)
- Diccionario Médico - PDF 2Документ1 страницаDiccionario Médico - PDF 2jjccmm11scribdОценок пока нет
- Cantando la alegría de vivirДокумент24 страницыCantando la alegría de vivirVicky HdzОценок пока нет
- Introducción A Los Sistemas - Segundo ParcialДокумент3 страницыIntroducción A Los Sistemas - Segundo ParcialLeonidas RosesОценок пока нет
- Taller de 09 Religion Octubre-2021Документ3 страницыTaller de 09 Religion Octubre-2021Dylan GuerreroОценок пока нет
- Soldadura por arco eléctrico: preguntas y respuestasДокумент17 страницSoldadura por arco eléctrico: preguntas y respuestasJulio Miranda AlarconОценок пока нет
- Simbolos Personalizados y SoportesДокумент18 страницSimbolos Personalizados y Soporteskakoso74Оценок пока нет
- Et Atc Caranavi Rev1Документ33 страницыEt Atc Caranavi Rev1PEDRO ALEX MONTAÑO TINTAОценок пока нет
- P SocialДокумент3 страницыP SocialCamilo DiazОценок пока нет
- Feria345 01 Cultivo de Cilantro Coriandrum Sativum Con Diferen PDFДокумент15 страницFeria345 01 Cultivo de Cilantro Coriandrum Sativum Con Diferen PDFrosauraОценок пока нет
- Cómo proteger tu información en InternetДокумент5 страницCómo proteger tu información en InternetASAHEL GABRIEL GALAN LOPEZОценок пока нет
- Manual de Prácticas de Ergonomía V005Документ20 страницManual de Prácticas de Ergonomía V005Daniel ReyesОценок пока нет
- Auditoría interna: claves para cumplir objetivosДокумент17 страницAuditoría interna: claves para cumplir objetivosCarlos Ariel RamosОценок пока нет
- Flebotomia 110804103355 Phpapp01Документ10 страницFlebotomia 110804103355 Phpapp01Eduardo GM100% (1)
- Informe DETERMINACION DE LA LECHE.Документ12 страницInforme DETERMINACION DE LA LECHE.jose HERNANDEZОценок пока нет
- 074 COPIMA S.A. - Proyecto Drenaje Pluvial Selva AlegreДокумент1 страница074 COPIMA S.A. - Proyecto Drenaje Pluvial Selva AlegreRobertoОценок пока нет
- Los Estudios Culturales en EEUUДокумент1 страницаLos Estudios Culturales en EEUUManuel HernandezОценок пока нет
- Toshiba IntroduccionДокумент17 страницToshiba IntroduccionNelsonОценок пока нет
- Charles H. Spurgeon - Comer en Verdad La Carne de CristoДокумент16 страницCharles H. Spurgeon - Comer en Verdad La Carne de CristobetymercadoОценок пока нет
- Sistema de Ecuaciones Lineales Con 2 Variables (Ficha 2)Документ1 страницаSistema de Ecuaciones Lineales Con 2 Variables (Ficha 2)Victor IdrogoОценок пока нет
- BalanceComprobacionNegocioДокумент6 страницBalanceComprobacionNegocioAndrea SierraОценок пока нет
- Cuestionario sobre medición de velocidad con tubo Pitot y correccionesДокумент3 страницыCuestionario sobre medición de velocidad con tubo Pitot y correccionesJonathan Gadiel Ramirez MartinezОценок пока нет
- Guia para La Evaluacion de Trabajos PesadosДокумент195 страницGuia para La Evaluacion de Trabajos PesadosKatherine Fonseca AravenaОценок пока нет
- R 3Документ6 страницR 3Javier GarciaОценок пока нет
- Dosificación PREPRIMARIA SUCHITEPÉQUEZ Ciclo Escolar 2024Документ1 страницаDosificación PREPRIMARIA SUCHITEPÉQUEZ Ciclo Escolar 2024Rosalba Isabel Margarita Chuc HernandezОценок пока нет
- La Democracia en El Gobierno Universitario. Cambios Estatutarios en Universidades Nacionales Argentinas (1989-2013) 1Документ18 страницLa Democracia en El Gobierno Universitario. Cambios Estatutarios en Universidades Nacionales Argentinas (1989-2013) 1barbaraОценок пока нет
- Acta Acuerdo ATE Reg05Документ3 страницыActa Acuerdo ATE Reg05MinutoYaОценок пока нет
- Diseño grupo hidroeléctrico turbina axial 35 kW AndahuaylillasДокумент33 страницыDiseño grupo hidroeléctrico turbina axial 35 kW AndahuaylillasGonzalo Alejandro QHОценок пока нет
- Guía #1 OCTAVO 3 Europa Napoleónica y Congreso de VienaДокумент5 страницGuía #1 OCTAVO 3 Europa Napoleónica y Congreso de VienaMaria Luisa Montoya PlazasОценок пока нет