Вам также может понравиться
- Grados de Libertad e Inversion CinemáticaДокумент30 страницGrados de Libertad e Inversion CinemáticaDiego Niikii Sixx100% (1)
- Tema-Objetivos-Marco TeóricoДокумент11 страницTema-Objetivos-Marco TeóricoAustin OrtegaОценок пока нет
- MecanismosДокумент14 страницMecanismosdavo1094Оценок пока нет
- Lab 2Документ28 страницLab 2Kevin EsquivelОценок пока нет
- Fundamentos de CinematicaДокумент55 страницFundamentos de CinematicaLeonel José AlvaradoОценок пока нет
- Mecanismos-Unidad 1Документ13 страницMecanismos-Unidad 1Oyuki MaquedaОценок пока нет
- Mecanismos articulados de 4 barrasДокумент16 страницMecanismos articulados de 4 barrasMarisabel LiscanoОценок пока нет
- Principales Mecanismos PlanosДокумент4 страницыPrincipales Mecanismos Planosdanilot2680% (5)
- Mecanismos de Eslabones ArticuladosДокумент25 страницMecanismos de Eslabones ArticuladosMaxi I. Céspedes GonzalesОценок пока нет
- Cinemática de MecanismosДокумент6 страницCinemática de MecanismosAstrid MeléndezОценок пока нет
- Otros Términos y ConceptosДокумент4 страницыOtros Términos y ConceptosJohard Mc DanielОценок пока нет
- 2.10 Transformación de EslabonamientosДокумент1 страница2.10 Transformación de EslabonamientosYVAN RENE LEIVA CALVANAPONОценок пока нет
- Mecanismo de Cuatro Barras ArticuladasДокумент33 страницыMecanismo de Cuatro Barras ArticuladasAlan Rosas AranaОценок пока нет
- T3Документ9 страницT3Josue MendozaОценок пока нет
- Clase 2Документ30 страницClase 2David Estrada GrisalesОценок пока нет
- MecanismoДокумент31 страницаMecanismoJulio Cesar Castillo DelgadoОценок пока нет
- Inversión cinemática en mecanismos de 4 barrasДокумент2 страницыInversión cinemática en mecanismos de 4 barrasAndree CrОценок пока нет
- Tabulación de Centros InstantaneosДокумент50 страницTabulación de Centros InstantaneosmijachuОценок пока нет
- FOLLETO MECANISMOS (Parte 2) PDFДокумент10 страницFOLLETO MECANISMOS (Parte 2) PDFErik GuadarramaОценок пока нет
- Inversion de Mecanismo 4 BarrasДокумент2 страницыInversion de Mecanismo 4 BarrasElieser CastilloОценок пока нет
- Simbologia TMMДокумент9 страницSimbologia TMMAnonymous ZMwWk2vОценок пока нет
- Mecanismos 2Документ16 страницMecanismos 2Kevin Yahir Ramírez MoralesОценок пока нет
- Análisis cinemática mecanismosДокумент12 страницAnálisis cinemática mecanismosracso4242Оценок пока нет
- Mecanismo de 4 BarrasДокумент9 страницMecanismo de 4 BarrasAlbert GuerreroОценок пока нет
- Eslabonamientos de Más de Cuatro Barras, Los Resortes Como Eslabones y Mecanismos FlexiblesДокумент10 страницEslabonamientos de Más de Cuatro Barras, Los Resortes Como Eslabones y Mecanismos FlexiblesDarwin CarrilloОценок пока нет
- Acoplamientos - Transmision de MovimientoДокумент15 страницAcoplamientos - Transmision de MovimientoJohn Alejandro Perez PerezОценок пока нет
- Mecanismos de línea rectaДокумент39 страницMecanismos de línea rectaManuel IturbideОценок пока нет
- Unidad 2-Fundamentos de La CinemáticaДокумент14 страницUnidad 2-Fundamentos de La CinemáticaNayeli EsquivelОценок пока нет
- Laboratorio 2Документ5 страницLaboratorio 2Miguel Emmanuel Rojas TerronesОценок пока нет
- Clase Mecanismos de 4 Barras_1Документ24 страницыClase Mecanismos de 4 Barras_1pipe spОценок пока нет
- Conceptos Generales de MecanismosДокумент14 страницConceptos Generales de MecanismosMauricio LoachaminОценок пока нет
- Grados de LibertadДокумент7 страницGrados de LibertadAlexis Javiher100% (1)
- Mecanismos de 4 BarrasДокумент11 страницMecanismos de 4 BarrasXav Jmz HdezОценок пока нет
- Dise o de MecansimosДокумент662 страницыDise o de Mecansimosalfonso_gonzale354486% (7)
- Actuadores mecánicos y sistemas de transmisión de movimientoДокумент5 страницActuadores mecánicos y sistemas de transmisión de movimientoFernando RuizОценок пока нет
- Lec 06042020Документ22 страницыLec 06042020Aracelly Lidia Lima TiconaОценок пока нет
- Diagrama de GeorgesДокумент9 страницDiagrama de GeorgesEdwin Oria EspinozaОценок пока нет
- MOVILIDADДокумент13 страницMOVILIDADlmaldonado_349011Оценок пока нет
- Mecanismo de cuatro barras articuladasДокумент23 страницыMecanismo de cuatro barras articuladasAracelly Lidia Lima Ticona100% (1)
- TMM-02 Mecanismos Articulados PlanosДокумент24 страницыTMM-02 Mecanismos Articulados PlanosNestorRinconMalloОценок пока нет
- 1 Terminologia y Conceptos Basicos 4 BarrasДокумент15 страниц1 Terminologia y Conceptos Basicos 4 BarrasKatty SaucedaОценок пока нет
- TMM-02 Mecanismos Articulados Planos v2-1Документ25 страницTMM-02 Mecanismos Articulados Planos v2-1gonzaloОценок пока нет
- Clasificación MecanismosДокумент36 страницClasificación MecanismosMiguel A. RomoОценок пока нет
- Inversión CinemáticaДокумент6 страницInversión CinemáticaLuis Alberto ChávezОценок пока нет
- Mecanismos 11 2020Документ13 страницMecanismos 11 2020Ricardo SandovalОценок пока нет
- Levas 2Документ11 страницLevas 2Manuel RoblesОценок пока нет
- Analisis de Sistemas ArticuladosДокумент24 страницыAnalisis de Sistemas ArticuladosLalo Toño Peres LopesОценок пока нет
- Presentacion Mecanismos10Документ39 страницPresentacion Mecanismos10mariamОценок пока нет
- Diagrama Cinematico y MovilidadSegunda ClaseДокумент9 страницDiagrama Cinematico y MovilidadSegunda ClaseLeonardo RosasОценок пока нет
- Resumen Diseño de Mecanismos, Analisis y Sintesis Arthur ErmanДокумент11 страницResumen Diseño de Mecanismos, Analisis y Sintesis Arthur ErmanAnibal DazaОценок пока нет
- Ley de GrashofДокумент4 страницыLey de GrashofCristian Alejandro Agüero MoránОценок пока нет
- Mecanismo de Cuatro Barras ArticuladasДокумент12 страницMecanismo de Cuatro Barras Articuladasbruno lopezОценок пока нет
- Clasificacion de Las Levas y Los SeguidoresДокумент7 страницClasificacion de Las Levas y Los SeguidoresRosa MaribelОценок пока нет
- Diseño de devanados en máquinas síncronasДокумент18 страницDiseño de devanados en máquinas síncronasJose LopezОценок пока нет
- Concordia - Uno - SeisДокумент118 страницConcordia - Uno - SeisdavidОценок пока нет
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasОценок пока нет
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoОт EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoОценок пока нет
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОт EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorОценок пока нет
- Transferencia de Impulso SuperficialДокумент8 страницTransferencia de Impulso SuperficialAlberto M FuentesОценок пока нет
- Transferencia de Impulso SuperficialДокумент8 страницTransferencia de Impulso SuperficialAlberto M FuentesОценок пока нет
- Ejercicios LadderДокумент6 страницEjercicios LadderArturo Esquivel Rendón67% (3)
- Presentacion 7 HerramientasДокумент26 страницPresentacion 7 HerramientasAlberto M FuentesОценок пока нет
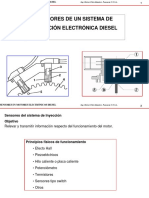
- Sensores en Motores DieselДокумент26 страницSensores en Motores DieselHéctor Fidel Chire RamírezОценок пока нет
- Taller Robot I Calibre ArduinoДокумент64 страницыTaller Robot I Calibre Arduinosind2Оценок пока нет
- Actuadores y SensoresДокумент75 страницActuadores y SensoresMilagros Vega MuroОценок пока нет
- SEOSORESДокумент39 страницSEOSORESAlberto M FuentesОценок пока нет
- Elementos Mecatronico en Un VehiculoДокумент27 страницElementos Mecatronico en Un VehiculoLuis MauricioОценок пока нет
- Iso 31000Документ5 страницIso 31000Alberto M FuentesОценок пока нет
- 20 Riesgos 2018Документ19 страниц20 Riesgos 2018Alberto M FuentesОценок пока нет
- La Matriz Ie Versic3b3n 2016Документ13 страницLa Matriz Ie Versic3b3n 2016JeanCVОценок пока нет
- Ejercicios de Arduino ResueltosДокумент34 страницыEjercicios de Arduino ResueltosKiara Salcedo MamaniОценок пока нет
- HerramientaДокумент21 страницаHerramientaAlberto M FuentesОценок пока нет
- TFG. Alejandro Castillejo CalleДокумент127 страницTFG. Alejandro Castillejo Callevicsierey_974092471100% (1)
- Guias Diagnostico A Motor A Diesel PDFДокумент57 страницGuias Diagnostico A Motor A Diesel PDFAlberto M FuentesОценок пока нет
- Principios de PLC - Hardware, Configuracion e Instrucciones BasicasДокумент60 страницPrincipios de PLC - Hardware, Configuracion e Instrucciones BasicasJonathan Olivier Salgado NesbetОценок пока нет
- Inyeccion Common Rail - BoschДокумент132 страницыInyeccion Common Rail - BoschManuel Roberto Chirinos Valer100% (2)
- Proyecto de GraduacionДокумент94 страницыProyecto de GraduacionAlberto M FuentesОценок пока нет
- PLC SIEMENS LOGO: Control lógico programableДокумент28 страницPLC SIEMENS LOGO: Control lógico programableAlberto M FuentesОценок пока нет
- Boschsensoresyactuadoresek4 121120111259 Phpapp02Документ125 страницBoschsensoresyactuadoresek4 121120111259 Phpapp02Jose CespedesОценок пока нет
- Guía Paso a Paso para Diagnosticar Código P0112Документ20 страницGuía Paso a Paso para Diagnosticar Código P0112Alberto M FuentesОценок пока нет
- Manual de Mecanica AutomotrizДокумент280 страницManual de Mecanica Automotrizpato335393% (14)
- Simatic Step 7 Nivel BasicoДокумент81 страницаSimatic Step 7 Nivel BasicoAlberto M FuentesОценок пока нет
- Torque Araujo y GardeaДокумент7 страницTorque Araujo y GardeaAlberto M FuentesОценок пока нет
- Análisis de Circuitos en Ingeniería 7ma Edición Hayt, Jack Kemmerly, Steven Durbin Lib PDFДокумент883 страницыAnálisis de Circuitos en Ingeniería 7ma Edición Hayt, Jack Kemmerly, Steven Durbin Lib PDFAlberto M FuentesОценок пока нет
- Ups CT006846Документ87 страницUps CT006846JëändrÿKâl-ElОценок пока нет
- Gauss JordanДокумент59 страницGauss JordanJhonny CahuayaОценок пока нет
- Modulo 3 Concepto Basico FRENOSДокумент27 страницModulo 3 Concepto Basico FRENOSCesar Javier Espinola GutierrezОценок пока нет
- Sensores Karman VórtexДокумент4 страницыSensores Karman VórtexAlberto M FuentesОценок пока нет
- ALTERNADORДокумент24 страницыALTERNADORYolanda AlvarezОценок пока нет
- 2da Evaluación de Los Elementos de Máquina (Rodamientos) Rev 0Документ6 страниц2da Evaluación de Los Elementos de Máquina (Rodamientos) Rev 0Leonardo MataОценок пока нет
- Honda CB Cbf500 Libro TallerДокумент124 страницыHonda CB Cbf500 Libro Tallerkakaku9Оценок пока нет
- Diagnóstico de Fallas de La CulataДокумент2 страницыDiagnóstico de Fallas de La CulataJimmy Aleman70% (10)
- Maquinaria Sistema ElectricoДокумент13 страницMaquinaria Sistema Electricoandres quintana100% (1)
- Estudio Lubricación 2011Документ11 страницEstudio Lubricación 2011Tamara GarciaОценок пока нет
- DTC VagДокумент225 страницDTC VagAna Belen Ismael AnaeIsmaelОценок пока нет
- T Espel 0231Документ187 страницT Espel 0231Wlamaran MartinezОценок пока нет
- Ejercicos de PLC 1Документ6 страницEjercicos de PLC 1gilberttОценок пока нет
- Teoría turbomáquinasДокумент25 страницTeoría turbomáquinasCarlos Alberto RodriguezОценок пока нет
- Historia de Los Motores de C.I.Документ36 страницHistoria de Los Motores de C.I.Elkin Andrw NoriegaОценок пока нет
- OTS SAP Mantenimiento 2022 AGOSTO PDFДокумент5 страницOTS SAP Mantenimiento 2022 AGOSTO PDFVictor Vello LobatoОценок пока нет
- 5MTB 2002Документ79 страниц5MTB 2002maximchacaОценок пока нет
- Partes de La Maquina de C.CДокумент5 страницPartes de La Maquina de C.CJosué Antonio TrinidadОценок пока нет
- Mantenimiento RodamientosДокумент546 страницMantenimiento Rodamientosdayoz servicio100% (2)
- Engranajes - Cónicos - Tornillo Sin Fin Rueda Helicoidal BynДокумент21 страницаEngranajes - Cónicos - Tornillo Sin Fin Rueda Helicoidal BynFran RodriguezОценок пока нет
- Certificación QSK60Документ18 страницCertificación QSK60celsoОценок пока нет
- Actividad 6. - CAUSAS QUE GENERAN VIBRACIONES EN LAS MÁQUINAS.Документ3 страницыActividad 6. - CAUSAS QUE GENERAN VIBRACIONES EN LAS MÁQUINAS.Alfonso ArroyoОценок пока нет
- RoboshotДокумент4 страницыRoboshotAndresPonceОценок пока нет
- Tren de Potencia de Motoniveladora Gd655a-3e0Документ35 страницTren de Potencia de Motoniveladora Gd655a-3e0Julio FloresОценок пока нет
- Inacap - Semana 3 (Modo de Compatibilidad)Документ49 страницInacap - Semana 3 (Modo de Compatibilidad)pipearthas100% (1)
- Manejo de Catalogos y NomenclaturasДокумент34 страницыManejo de Catalogos y NomenclaturasGustavo SanchezОценок пока нет
- Lab Tester NeumaticoДокумент8 страницLab Tester NeumaticocesarОценок пока нет
- Normas TornillosДокумент5 страницNormas TornillosJose PidemeliОценок пока нет
- 56D2 2010 PDFДокумент70 страниц56D2 2010 PDFSebastian HernándezОценок пока нет
- Archivetempproblemas de Dinamica Ing IndustrialДокумент5 страницArchivetempproblemas de Dinamica Ing IndustrialDante J Garcia NeyraОценок пока нет
- 77pag - Análisis Estructural de Una Grua PlumaДокумент77 страниц77pag - Análisis Estructural de Una Grua PlumaJulio Cesar PintosОценок пока нет
- Seleccion de RodamientosДокумент6 страницSeleccion de RodamientosRenata Astudillo100% (1)
- Sistema de combustible Transit 2004Документ19 страницSistema de combustible Transit 2004kino22100% (1)