Вам также может понравиться
- Int. DiferencialДокумент2 страницыInt. DiferencialjosethОценок пока нет
- Comparación deДокумент1 страницаComparación dejosethОценок пока нет
- Calculo de Lineas y Redes Electricas - Ramón María Mujal Rosas PDFДокумент215 страницCalculo de Lineas y Redes Electricas - Ramón María Mujal Rosas PDFHansAhumadaОценок пока нет
- Conductores eléctricos: materiales, clasificación y normatividadДокумент108 страницConductores eléctricos: materiales, clasificación y normatividadsinyo123Оценок пока нет
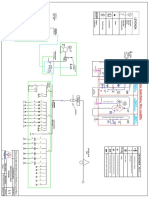
- Diagrama Unifilar COMPLETO - A3Документ1 страницаDiagrama Unifilar COMPLETO - A3josethОценок пока нет
- LABORATORIO N - 3 Reconocimiento de Los Elementos de Un Tablero de Maniobras y Circuito de ControlДокумент26 страницLABORATORIO N - 3 Reconocimiento de Los Elementos de Un Tablero de Maniobras y Circuito de ControljosethОценок пока нет
- Factorizacion de CholeskyДокумент16 страницFactorizacion de CholeskyjosethОценок пока нет
- CONDUCTORES ELECTRICOS - TareaДокумент5 страницCONDUCTORES ELECTRICOS - TareajosethОценок пока нет
- A02 Dimens. Selecc. Conductores Electricos PDFДокумент46 страницA02 Dimens. Selecc. Conductores Electricos PDFneisserОценок пока нет
- Elastic I DadДокумент3 страницыElastic I DadMiguel Buendia QuilicheОценок пока нет
- Codigo Nacional de Electricidad (Suministro 2011)Документ328 страницCodigo Nacional de Electricidad (Suministro 2011)Alejandro Pedrera CalleОценок пока нет
- Laboratorio N - 8, Arranque Estrella-TrianguloДокумент11 страницLaboratorio N - 8, Arranque Estrella-TrianguloAdrian Arauco CarhuasОценок пока нет
- PupuДокумент29 страницPupuRicardo LuisОценок пока нет
- Regulacion de Tension en Transformadores Con TapsДокумент21 страницаRegulacion de Tension en Transformadores Con TapsIvan Rondinel Buleje100% (2)
- Resolucion de Un Sistema Puesta A TierraДокумент3 страницыResolucion de Un Sistema Puesta A TierrajosethОценок пока нет
- Cámara Hilton DefinitivaДокумент28 страницCámara Hilton DefinitivajosethОценок пока нет
- Triptico OsciladoresДокумент2 страницыTriptico OsciladoresjosethОценок пока нет
- Aislamiento en Subestaciones Electricas, Fiee UnmsmДокумент68 страницAislamiento en Subestaciones Electricas, Fiee UnmsmjosethОценок пока нет
- Exposicion de CamposДокумент3 страницыExposicion de CamposjosethОценок пока нет
- Procesos Reversibles e IrreversiblesДокумент2 страницыProcesos Reversibles e IrreversiblesjosethОценок пока нет
- InstruccionesДокумент4 страницыInstruccionesjosethОценок пока нет
- Pérdidas MecánicasДокумент18 страницPérdidas MecánicasjosethОценок пока нет
- Previo 2 Electronicos 2Документ7 страницPrevio 2 Electronicos 2josethОценок пока нет
- Transformador Monofasica (Prueba de Vacio)Документ11 страницTransformador Monofasica (Prueba de Vacio)josethОценок пока нет
- Info SPTДокумент18 страницInfo SPTjosethОценок пока нет
- Trabajo de Electronicos 1Документ4 страницыTrabajo de Electronicos 1Jazmin Madeleine Torres NapánОценок пока нет
- El TransistorДокумент5 страницEl TransistorAnonymous s9W7lVrОценок пока нет
- Variables: E Xtensiva Intensiva Especifica MasaДокумент18 страницVariables: E Xtensiva Intensiva Especifica MasajosethОценок пока нет
- Barrera de PotencialДокумент5 страницBarrera de Potencialmarcosuribe100% (1)
- Informe Previo Rectificadores y FiltrosДокумент11 страницInforme Previo Rectificadores y FiltrosjosethОценок пока нет
- Informe YefriДокумент22 страницыInforme YefriKaren Johanna Ramos PazОценок пока нет
- Componentes Internos y Externos Del ComputadorДокумент2 страницыComponentes Internos y Externos Del ComputadorAxel Israel RosalesОценок пока нет
- Tesis Esime Zacatenco Ie PDFДокумент219 страницTesis Esime Zacatenco Ie PDFGRANVILLAОценок пока нет
- Manual instalación electrificador cerco RFДокумент12 страницManual instalación electrificador cerco RFAnonymous BEAHDwiEkОценок пока нет
- ITPC Camion K39 Actualización de Software INVERTEX V3.05 A V4.00.Документ7 страницITPC Camion K39 Actualización de Software INVERTEX V3.05 A V4.00.jag84_25242Оценок пока нет
- Tipos de EmpaquetamientosДокумент5 страницTipos de EmpaquetamientosKeii Tovar25% (4)
- Manual de uso HG260Документ11 страницManual de uso HG260Valmir BertoldoОценок пока нет
- Redes de Comunicación CoaxialДокумент22 страницыRedes de Comunicación CoaxialAngel De Jesus Olvera BarreraОценок пока нет
- Spectrum RadioДокумент28 страницSpectrum RadioHelver Mauricio Valbuena FarfanОценок пока нет
- Examen Física ElectrónicaДокумент20 страницExamen Física ElectrónicaChelsy Madeleine Puente De La Vega RoqueОценок пока нет
- Tercera Práctica FinalДокумент16 страницTercera Práctica Finalandres zegarraОценок пока нет
- Certificacion 0Документ18 страницCertificacion 0LuisArmandoFranyuttiArciaОценок пока нет
- El Transistor MOSFETДокумент27 страницEl Transistor MOSFETPaul Ivan Napa OreОценок пока нет
- H-M1K1-20-22427 (4.0) MEC-1000 SpanishДокумент182 страницыH-M1K1-20-22427 (4.0) MEC-1000 SpanishChandraz D Portgas100% (2)
- Etados de OxidacidacionДокумент2 страницыEtados de OxidacidacionJordi Bolamos ArteagaОценок пока нет
- Manual Mindray Bs 240 EspañolДокумент371 страницаManual Mindray Bs 240 EspañolYeRaLd lar70% (10)
- Actividades para La Libreta PDFДокумент6 страницActividades para La Libreta PDFjchp75Оценок пока нет
- INSTRUCTIVO DE USO EQUIPO-analizador de Humedad de La Serie PMCДокумент3 страницыINSTRUCTIVO DE USO EQUIPO-analizador de Humedad de La Serie PMCyndira ceciliaОценок пока нет
- Maquinas y Mecanismos Diapositivas 2Документ18 страницMaquinas y Mecanismos Diapositivas 2Danizot3100% (2)
- Componentes en Un Sistema Hidraúlico Margarita Crespo FerreroДокумент2 страницыComponentes en Un Sistema Hidraúlico Margarita Crespo FerreroArly Lam RoqueОценок пока нет
- Principios de Funcionamiento de RelésДокумент41 страницаPrincipios de Funcionamiento de RelésssОценок пока нет
- Free Mp3 ConverterДокумент3 страницыFree Mp3 ConverterAdelis RodriguezОценок пока нет
- Manual Clarion DB265Документ52 страницыManual Clarion DB265Juantan TonioОценок пока нет
- ControlTemperaturaE5CBДокумент8 страницControlTemperaturaE5CBOrnelas DanielОценок пока нет
- AtmegaДокумент8 страницAtmegaGovanna LunaОценок пока нет
- EnlacesQuímicosTiposДокумент8 страницEnlacesQuímicosTiposJeferson AnchatuñaОценок пока нет
- Ecuaciones de MaxwellДокумент6 страницEcuaciones de MaxwellAlex ContrerasОценок пока нет
- 06 - Introduccion A Vlan y VTP - AlumnoДокумент49 страниц06 - Introduccion A Vlan y VTP - AlumnoLalo ZúñigaОценок пока нет
- Historia de La ComputadoraДокумент28 страницHistoria de La ComputadoraDavid PawqarОценок пока нет