Вам также может понравиться
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Electrical Machines: Lecture Notes for Electrical Machines CourseОт EverandElectrical Machines: Lecture Notes for Electrical Machines CourseОценок пока нет
- Electricity QuestionsДокумент133 страницыElectricity QuestionskartavyajainОценок пока нет
- Internship KsebДокумент97 страницInternship KsebVishnu VijayaramanОценок пока нет
- Linear SolenoidsДокумент20 страницLinear SolenoidsAndrei ReventОценок пока нет
- Voltage and Reactive Power ControlДокумент34 страницыVoltage and Reactive Power Controlpsmeee100% (1)
- Basic Structure of A Power SystemДокумент9 страницBasic Structure of A Power Systembiruke6Оценок пока нет
- Chapter2 DevicesДокумент33 страницыChapter2 DevicesFrozenTuxОценок пока нет
- Electrical Engineering Interview Guide BookДокумент8 страницElectrical Engineering Interview Guide BookshubhampattiОценок пока нет
- Electromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorДокумент34 страницыElectromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorSathiyarajОценок пока нет
- DC M&T - Lecture - Notes PDFДокумент138 страницDC M&T - Lecture - Notes PDFTridasha AithalОценок пока нет
- HVDC Link ControlДокумент4 страницыHVDC Link ControlSusmita AdhikaryОценок пока нет
- Basic Motor ControlДокумент17 страницBasic Motor ControlHeizen BulanОценок пока нет
- BCH April 16Документ137 страницBCH April 16Ramachandra SahuОценок пока нет
- Tariff, Power Factor and Power Factor ImprovementДокумент12 страницTariff, Power Factor and Power Factor ImprovementnurliyanaОценок пока нет
- Protection & SwitchgearДокумент50 страницProtection & SwitchgearvnrsamyОценок пока нет
- Electrical MachinesДокумент82 страницыElectrical Machinessanthosiyal751Оценок пока нет
- IE Rules For DP Structure - Electrical Notes & ArticlesДокумент10 страницIE Rules For DP Structure - Electrical Notes & Articleshemant kumarОценок пока нет
- 022 - Lecture 22 360 Chapter 7 Single Phase Induction MotorДокумент29 страниц022 - Lecture 22 360 Chapter 7 Single Phase Induction Motorapi-369945467% (3)
- Electric Motors and GeneratorsДокумент30 страницElectric Motors and GeneratorshafizrahimmitОценок пока нет
- Switchgear and Protection 3Документ4 страницыSwitchgear and Protection 3vimal067Оценок пока нет
- 360 Topic 6 DC MachineДокумент33 страницы360 Topic 6 DC MachineAchsan ArfandiОценок пока нет
- Unit IIДокумент194 страницыUnit IIMuniyasamyОценок пока нет
- EET301 2013 Chapter 6Документ51 страницаEET301 2013 Chapter 6Lee Boon HongОценок пока нет
- Induction MotorДокумент43 страницыInduction MotorAshvani ShuklaОценок пока нет
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionДокумент73 страницыEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaОценок пока нет
- POWER Transients in Power Systems 217 P PDFДокумент217 страницPOWER Transients in Power Systems 217 P PDF19848096Оценок пока нет
- Power Control Devices Report Ni SottoДокумент61 страницаPower Control Devices Report Ni SottoLEONEL SOTTOОценок пока нет
- Basic Electrical Engineering - Leacture NotesДокумент29 страницBasic Electrical Engineering - Leacture NotesEngineer Zeeshan RasheedОценок пока нет
- AC Machine 4Документ35 страницAC Machine 4Fadhil A. HasanОценок пока нет
- Rotating DC Motor: TitleДокумент71 страницаRotating DC Motor: TitlebijalmehtaОценок пока нет
- Lecture 5 Power Factor ImprovementДокумент54 страницыLecture 5 Power Factor ImprovementMohammed ShifulОценок пока нет
- Three Phase Induction Motor ExperimentДокумент21 страницаThree Phase Induction Motor ExperimentKarthik GanjiОценок пока нет
- Speeed ControlДокумент3 страницыSpeeed ControlChristine GomezОценок пока нет
- DC-DC ConverterДокумент24 страницыDC-DC ConverterkandularanjithОценок пока нет
- Parallel Operation of Synchronous Generators-V3Документ70 страницParallel Operation of Synchronous Generators-V3John Patrick CeldaОценок пока нет
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFДокумент7 страницInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiОценок пока нет
- DC Motor S: Anand 08338958770Документ79 страницDC Motor S: Anand 08338958770Rohit AvasthiОценок пока нет
- Industrial Drives & Its ApplicationsДокумент25 страницIndustrial Drives & Its ApplicationsShankar BaddurОценок пока нет
- Static RelaysДокумент11 страницStatic RelaysBharathwaj SreedharОценок пока нет
- Single Line Diagram of Power System - Circuit GlobeДокумент7 страницSingle Line Diagram of Power System - Circuit GlobeMohammad HamamdОценок пока нет
- DC Machines: Parts of DC MachineДокумент51 страницаDC Machines: Parts of DC MachineKUMARОценок пока нет
- EE 442 642 IntroductionДокумент14 страницEE 442 642 IntroductionUSERNAME12340987Оценок пока нет
- Single Phase Motor Capacitor SizingДокумент2 страницыSingle Phase Motor Capacitor Sizinghemant kumar0% (1)
- Basic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringДокумент158 страницBasic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringRonan Rojas100% (1)
- PSP 02Документ60 страницPSP 02faizanОценок пока нет
- Power Systems Lab PDFДокумент54 страницыPower Systems Lab PDFBhanu BkvОценок пока нет
- A943mdistribution of Electrical PowerДокумент60 страницA943mdistribution of Electrical Powerkumar mОценок пока нет
- Presentation1.distribution System - HOWДокумент32 страницыPresentation1.distribution System - HOWSHEETAL PARMARОценок пока нет
- Induction Motor BrakingДокумент26 страницInduction Motor BrakingAshwini Singh100% (3)
- EE8411 - EM 2 LabДокумент6 страницEE8411 - EM 2 LabVengatОценок пока нет
- Overview of Kseb: GenerationДокумент57 страницOverview of Kseb: GenerationAswin LalОценок пока нет
- Construction and Working of Brushless DC PDFДокумент12 страницConstruction and Working of Brushless DC PDFaswardi8756Оценок пока нет
- Cuk, Sepic Zeta NptelДокумент20 страницCuk, Sepic Zeta NptelAvinash Babu KmОценок пока нет
- Practical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsОт EverandPractical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- New Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringОт EverandNew Approaches to the Design and Economics of EHV Transmission Plant: International Series of Monographs in Electrical EngineeringОценок пока нет
- Performance Analysis of Inverter Based Maximum Power Point Tracking For PV Grid-Connected SystemДокумент5 страницPerformance Analysis of Inverter Based Maximum Power Point Tracking For PV Grid-Connected SystemHari ReddyОценок пока нет
- References: Research, 8 (1984/85) pp.15 - 26Документ12 страницReferences: Research, 8 (1984/85) pp.15 - 26Hari ReddyОценок пока нет
- 6.instrctions To The CandidatesДокумент3 страницы6.instrctions To The CandidatesHari ReddyОценок пока нет
- Intelligent Energy Management: An Innovative Emerging FieldДокумент3 страницыIntelligent Energy Management: An Innovative Emerging FieldHari ReddyОценок пока нет
- Generalized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveДокумент22 страницыGeneralized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveHari ReddyОценок пока нет
- VR SyllabusДокумент1 страницаVR SyllabusHari ReddyОценок пока нет
- F11290486S319 PDFДокумент8 страницF11290486S319 PDFHari ReddyОценок пока нет
- Breakout Group Presentation Format FDP201x 25th Nov 2018RCID1356Документ4 страницыBreakout Group Presentation Format FDP201x 25th Nov 2018RCID1356Hari ReddyОценок пока нет
- Bodhitree User Manual For InstructorsДокумент17 страницBodhitree User Manual For InstructorsHari ReddyОценок пока нет
- PDFДокумент4 страницыPDFHari ReddyОценок пока нет
- Technical Chapter Formation Petition 2015Документ7 страницTechnical Chapter Formation Petition 2015Hari ReddyОценок пока нет
- Empty Format For ScholarshipsДокумент3 страницыEmpty Format For ScholarshipsHari ReddyОценок пока нет
- Electrical Machines-II QuestionsДокумент2 страницыElectrical Machines-II QuestionsHari Reddy0% (1)
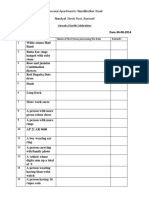
- Viswasai Apartments: Nandikotkur Road Nandyal Check Post, KurnoolДокумент2 страницыViswasai Apartments: Nandikotkur Road Nandyal Check Post, KurnoolHari ReddyОценок пока нет
- G. Pulla Reddy Engineering College (Autonomous) : KurnoolДокумент1 страницаG. Pulla Reddy Engineering College (Autonomous) : KurnoolHari ReddyОценок пока нет
- My SVPWMprojectДокумент68 страницMy SVPWMprojectHari Reddy100% (1)
- Week 4aДокумент39 страницWeek 4aHari ReddyОценок пока нет
- Directory of Officers and EmployeesДокумент25 страницDirectory of Officers and EmployeesHari ReddyОценок пока нет
- Recap: Can You Recollect What We Have Learnt in Last PeriodДокумент20 страницRecap: Can You Recollect What We Have Learnt in Last PeriodHari ReddyОценок пока нет
- SchifflerisedДокумент17 страницSchifflerisedJitendraОценок пока нет
- Thermo Dyanmics 2Документ2 страницыThermo Dyanmics 2xcalliber404Оценок пока нет
- Windlass Brake TestДокумент44 страницыWindlass Brake TestHasancan YavaşОценок пока нет
- Sesion 7Документ40 страницSesion 7Martin Y. KouОценок пока нет
- Lab Report No 6 Bs PhysicsДокумент6 страницLab Report No 6 Bs PhysicsITZ SUFYANОценок пока нет
- Ipc 9521Документ4 страницыIpc 9521ashu0470Оценок пока нет
- Extensive Applications of PM Gears: FocusДокумент4 страницыExtensive Applications of PM Gears: FocusAAAHОценок пока нет
- Design of Helical SpringsДокумент60 страницDesign of Helical SpringsKelvin Kindice MapurisaОценок пока нет
- Installation and User'S Manual 820 LX: Numero de SerieДокумент32 страницыInstallation and User'S Manual 820 LX: Numero de SerieAntWonxxxОценок пока нет
- PPF Multimedia CatalogДокумент24 страницыPPF Multimedia Catalogalperen52Оценок пока нет
- Chain Wheels ChainconveyorДокумент9 страницChain Wheels ChainconveyorPedro RBОценок пока нет
- Armature Controlled DCMotors Fedfrom HWRectifierДокумент20 страницArmature Controlled DCMotors Fedfrom HWRectifierTejas Sharma 2K20EE281Оценок пока нет
- Techniques For Obstacle Avoidance in Mobile RoboticsДокумент7 страницTechniques For Obstacle Avoidance in Mobile RoboticsHarold Geovanny Flores CardenasОценок пока нет
- Mathematical Model of Systems:: Rotational Mechanical System Transfer FunctionДокумент11 страницMathematical Model of Systems:: Rotational Mechanical System Transfer Functionchardo santosОценок пока нет
- 03 FloWatch HGVF Input and OutputДокумент21 страница03 FloWatch HGVF Input and Outputedwin_triana_9Оценок пока нет
- Levers in Musculoskeletal SystemДокумент22 страницыLevers in Musculoskeletal SystemGlenn JohnstonОценок пока нет
- Brochure ES-220 UHP Electric Skids PDFДокумент2 страницыBrochure ES-220 UHP Electric Skids PDFvenky4025Оценок пока нет
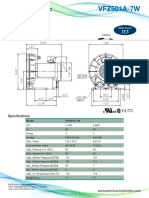
- Fuji Electric VFZ501A 7W DatasheetДокумент2 страницыFuji Electric VFZ501A 7W Datasheetghmp123Оценок пока нет
- Compressed Air System Gyanendra Sharma Npti DelhiДокумент12 страницCompressed Air System Gyanendra Sharma Npti DelhiNPTIОценок пока нет
- 04 - Analisa Pondasi DangkalДокумент50 страниц04 - Analisa Pondasi DangkalWak HoОценок пока нет
- Treadmill 93T-04 - THH100000 - PARTS LISTДокумент19 страницTreadmill 93T-04 - THH100000 - PARTS LISTpowerliftermiloОценок пока нет
- MAN 7020-0145 - Uk PDFДокумент99 страницMAN 7020-0145 - Uk PDFthis9999Оценок пока нет
- Dive Scubapro - Mk2+, Mk2 - Maintenance ProcedureДокумент4 страницыDive Scubapro - Mk2+, Mk2 - Maintenance ProceduremanonpomОценок пока нет
- HWK 6Документ2 страницыHWK 6Pame GarciaОценок пока нет
- Fluids and LubricantsДокумент2 страницыFluids and LubricantsRUN GOОценок пока нет
- Ultrasonic Plastic Welding HornДокумент5 страницUltrasonic Plastic Welding HornAnonymous MVHeP5zОценок пока нет
- EGF305 Topic 5-Intro To Failure Analysis PDFДокумент34 страницыEGF305 Topic 5-Intro To Failure Analysis PDFasdfasdОценок пока нет
- 02 The Wind Turbine-0001Документ16 страниц02 The Wind Turbine-0001vodasanket100% (1)
- RT Report Format Rev.1 17-3-19Документ6 страницRT Report Format Rev.1 17-3-19mohd as shahiddin jafriОценок пока нет
- 1-Fundamentals of Creep in MaterialsДокумент6 страниц1-Fundamentals of Creep in MaterialsLucianoBorasiОценок пока нет