Вам также может понравиться
- EE-101 (Unit-5)Документ81 страницаEE-101 (Unit-5)Chauhan AyushmaanОценок пока нет
- What Is A Variable Frequency Drive? How Does A VFD Work?Документ6 страницWhat Is A Variable Frequency Drive? How Does A VFD Work?S.M.Touhidur RahmanОценок пока нет
- AC Motor Control PDFДокумент4 страницыAC Motor Control PDFkryptОценок пока нет
- Three Phase TransformersДокумент11 страницThree Phase TransformersNosta SilvaОценок пока нет
- 145kv Gis SLDДокумент1 страница145kv Gis SLDKoushik BhaumikОценок пока нет
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Документ17 страницBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargОценок пока нет
- EM - 2010 - M - Power - Factor PDFДокумент7 страницEM - 2010 - M - Power - Factor PDFagustantoОценок пока нет
- 4 Article TLT Grease AdditivesДокумент11 страниц4 Article TLT Grease AdditivesYasir ShaikhОценок пока нет
- Chapter 3 Synchronous GeneratorДокумент21 страницаChapter 3 Synchronous Generatorahmad abufaresОценок пока нет
- Induction Motors Unit 3Документ26 страницInduction Motors Unit 3babu KaroliОценок пока нет
- Restricted Earth Fault Relay-AHQДокумент4 страницыRestricted Earth Fault Relay-AHQEnpak ArsalanОценок пока нет
- Battery & SMPS Power PlantДокумент31 страницаBattery & SMPS Power PlantRoshan EkkaОценок пока нет
- Rajdhani Power Supply & Load DetailsДокумент32 страницыRajdhani Power Supply & Load DetailsDeepak GehlotОценок пока нет
- Unit 3-Ac Machines PDFДокумент129 страницUnit 3-Ac Machines PDFhotty pantsОценок пока нет
- Grid Converters for Photovoltaic and Wind Power SystemsОт EverandGrid Converters for Photovoltaic and Wind Power SystemsРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Servo Motor - Servo Mechanism - Theory and Working PrincipleДокумент6 страницServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghОценок пока нет
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorДокумент11 страницSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- AC Machine Lecture No6Документ43 страницыAC Machine Lecture No6Mohammed Dyhia AliОценок пока нет
- E1 - Controlled Rectifiers PDFДокумент92 страницыE1 - Controlled Rectifiers PDFmitulОценок пока нет
- 5-Comparision Festo - Electrical Vs PneumaticДокумент67 страниц5-Comparision Festo - Electrical Vs PneumaticDonneil Frederiche Ong YabutОценок пока нет
- SMPC NotesДокумент98 страницSMPC NotesHarsha Anantwar100% (1)
- UNIT 5 - Special MachinesДокумент33 страницыUNIT 5 - Special MachinesKapilachander ThangavelОценок пока нет
- DC Motor DrivesДокумент26 страницDC Motor DrivesSudhir P BhatОценок пока нет
- AP GencoДокумент23 страницыAP GencoBhanu PrakashОценок пока нет
- of SRMДокумент22 страницыof SRMGopoji Dayanand71% (7)
- DC Motor Speed ControllerДокумент22 страницыDC Motor Speed ControllerShafqt MbrkОценок пока нет
- Induced Current Produces A Secondary Magnetic Field That Is Always Opposed To The Primary Magnetic Field That Induced It, An Effect CalledДокумент16 страницInduced Current Produces A Secondary Magnetic Field That Is Always Opposed To The Primary Magnetic Field That Induced It, An Effect CalledShaheer MirzaОценок пока нет
- Applied Directly To The Stator WindingsДокумент62 страницыApplied Directly To The Stator WindingsZekarias tenawОценок пока нет
- EE 010 402 DC Machines and TransformersДокумент2 страницыEE 010 402 DC Machines and TransformersResmara ShajahanОценок пока нет
- Furnace Press Control Process htgts6 PDFДокумент2 страницыFurnace Press Control Process htgts6 PDFAhmad DaoodОценок пока нет
- E.T.E. 3 Phase Transformer InfoДокумент9 страницE.T.E. 3 Phase Transformer InfoSanjay VermaОценок пока нет
- 3 Phase-Controlled DC Motor DrivesДокумент45 страниц3 Phase-Controlled DC Motor DrivesgilmartОценок пока нет
- Analysis of Chopper Fed D.C. Drive With PWM & Hysteresis Current Control SchemeДокумент8 страницAnalysis of Chopper Fed D.C. Drive With PWM & Hysteresis Current Control SchemeS Bharadwaj ReddyОценок пока нет
- Problem Set 1Документ9 страницProblem Set 1jerry tranОценок пока нет
- Practical Training PresentationДокумент29 страницPractical Training PresentationpoojaОценок пока нет
- Lecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationДокумент24 страницыLecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationAshish KumarОценок пока нет
- BLDCДокумент4 страницыBLDCmechtex Pvt LtdОценок пока нет
- Speed Control of DC MotorДокумент19 страницSpeed Control of DC MotorVijaya LakshmiОценок пока нет
- Chapter 5 Pneumatic and Hydraulic Actuation SystemsДокумент22 страницыChapter 5 Pneumatic and Hydraulic Actuation SystemsMukhammad FauzyОценок пока нет
- HIVERT-General VFD Catalog PDFДокумент32 страницыHIVERT-General VFD Catalog PDFzain shafiqОценок пока нет
- AC Motors LessonДокумент50 страницAC Motors LessonTracy Baptiste100% (1)
- Mini Hydal Power PlantДокумент18 страницMini Hydal Power PlantNoufalОценок пока нет
- Figure No. 1 Variable Frequency DriveДокумент38 страницFigure No. 1 Variable Frequency DriveAshutosh SoniОценок пока нет
- Closed Loop Speed Control of DC Motor DrivesДокумент4 страницыClosed Loop Speed Control of DC Motor DrivesypobuleshОценок пока нет
- CH 3 - Induction MotorsДокумент46 страницCH 3 - Induction MotorsMiz AelyfhaОценок пока нет
- Maintenance of Brushes and Commutators 2 enДокумент14 страницMaintenance of Brushes and Commutators 2 enSavitha VinayОценок пока нет
- AMEE310 Lab5Документ12 страницAMEE310 Lab5tsunaseetОценок пока нет
- VLT 5000 PDFДокумент193 страницыVLT 5000 PDFJOSUE RUIZОценок пока нет
- Solid State Drives Short BookДокумент48 страницSolid State Drives Short BookGomathi Raja MОценок пока нет
- Alireza Tashakori Abkenar Thesis PDFДокумент199 страницAlireza Tashakori Abkenar Thesis PDFYesha ShahОценок пока нет
- Motor Comparison Thru Flow Vacuum Cleaning - Motor Is Contained in A Sealed Motor CompartmentДокумент4 страницыMotor Comparison Thru Flow Vacuum Cleaning - Motor Is Contained in A Sealed Motor CompartmenttylerdurdaneОценок пока нет
- DC DrivesДокумент91 страницаDC DrivesferdiОценок пока нет
- Application of Brushless DC Motor in MilitaryДокумент10 страницApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- (Single+Three) Phase Induction Motors Interview Questions SetДокумент18 страниц(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeОценок пока нет
- Presentation On Heat EXchanger1Документ51 страницаPresentation On Heat EXchanger1BaqirMuhammadОценок пока нет
- Induction Motor DrivesДокумент32 страницыInduction Motor DrivessidharthОценок пока нет
- Switched Reluctance Motor (SRM)Документ8 страницSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahОценок пока нет
- AC Variable Frequency Drive With Static SteplessДокумент0 страницAC Variable Frequency Drive With Static Steplessswapneel_kulkarniОценок пока нет
- Hunting in Synchronous Motor - Electrical4u PDFДокумент5 страницHunting in Synchronous Motor - Electrical4u PDFRishiSunariya50% (2)
- BLDCДокумент4 страницыBLDCsathishОценок пока нет
- 7615040 (1)Документ18 страниц7615040 (1)ѵ.ɾísհí kմตαɾОценок пока нет
- Induction MachinesДокумент18 страницInduction Machinesdivya.babuОценок пока нет
- BEE (21EEE15A) Module 3BДокумент49 страницBEE (21EEE15A) Module 3BG46Anand P KОценок пока нет
- Lect 2Документ13 страницLect 2Yasir ShaikhОценок пока нет
- Iom LabДокумент8 страницIom LabYasir ShaikhОценок пока нет
- Raw Water & Waste Water: Utilities Unit - Area SpecificДокумент6 страницRaw Water & Waste Water: Utilities Unit - Area SpecificYasir ShaikhОценок пока нет
- Raw Water & Waste Water: Utilities Unit - Area SpecificДокумент5 страницRaw Water & Waste Water: Utilities Unit - Area SpecificYasir ShaikhОценок пока нет
- HydraulicsДокумент2 страницыHydraulicsYasir ShaikhОценок пока нет
- Physics Project ON: Full Wave RectifierДокумент11 страницPhysics Project ON: Full Wave RectifierkartikОценок пока нет
- PC BRO Selectiva Produktzuordnung ENДокумент4 страницыPC BRO Selectiva Produktzuordnung ENdosao17703Оценок пока нет
- Chapter 25 TEST BANKДокумент18 страницChapter 25 TEST BANKAli AlhammadiОценок пока нет
- Diesel LocomotiveДокумент74 страницыDiesel LocomotiveVikas GuptaОценок пока нет
- Interview Questions MS WordДокумент20 страницInterview Questions MS Wordhassan iftikhar100% (1)
- SMC - Senso MagneticoДокумент1 страницаSMC - Senso MagneticoIvan SilvaОценок пока нет
- Welding Machines Schedule of Loads PDF FreeДокумент2 страницыWelding Machines Schedule of Loads PDF FreeWar LockОценок пока нет
- FCL and ProtectionДокумент5 страницFCL and ProtectionshayanshayanОценок пока нет
- Energy Environment and Sustainability 1st Edition Moaveni Solutions ManualДокумент7 страницEnergy Environment and Sustainability 1st Edition Moaveni Solutions Manualannodatedfraised6ap0100% (32)
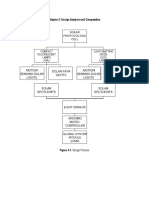
- Chapter 3: Design Analysis and ComputationДокумент5 страницChapter 3: Design Analysis and ComputationAdrian ToribioОценок пока нет
- PWRДокумент18 страницPWRSyaa MalyqaОценок пока нет
- KE Units CompДокумент7 страницKE Units CompKhanОценок пока нет
- GST PS Alarm SystemДокумент2 страницыGST PS Alarm Systemculeros10% (1)
- MTDC System PDFДокумент17 страницMTDC System PDFAshok Kumar67% (3)
- GeneradorДокумент8 страницGeneradorNANDORG27Оценок пока нет
- Metal-Enclosed Interrupter Switchgear Assemblies-Conformance TestingДокумент45 страницMetal-Enclosed Interrupter Switchgear Assemblies-Conformance TestingJose PirulliОценок пока нет
- Transformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersДокумент1 страницаTransformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersЛеха ЯнчукОценок пока нет
- ViewPDFServlet PDFДокумент1 страницаViewPDFServlet PDFkush guptaОценок пока нет
- 04 Synchronous MotorsДокумент2 страницы04 Synchronous MotorsgancanОценок пока нет
- Chapter 10 DC Machine Part 1Документ34 страницыChapter 10 DC Machine Part 1Shobanraj LetchumananОценок пока нет
- Vacuum Pump: Eve-Og 100 Ac3 Aqua Ie2Документ2 страницыVacuum Pump: Eve-Og 100 Ac3 Aqua Ie2David StefanОценок пока нет
- Transformer Tertiary Part 1Документ7 страницTransformer Tertiary Part 1Ahmad Ikhsan Kurnianto100% (1)
- Mobile Phone Charger Using Wind Energy: AbstractДокумент8 страницMobile Phone Charger Using Wind Energy: AbstractYaswanthОценок пока нет
- Abb Insulation MonitoringДокумент13 страницAbb Insulation MonitoringVaibhav AhujaОценок пока нет
- DC DC CONVERT DS en 12Документ2 страницыDC DC CONVERT DS en 12carlos G7Оценок пока нет
- CT200 LittlefuseДокумент2 страницыCT200 LittlefuseHugo Dennis Mattos EspinozaОценок пока нет