Вам также может понравиться
- DISCRIPTIONДокумент8 страницDISCRIPTIONRanu GamesОценок пока нет
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОт EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОценок пока нет
- Gear Chikuku 1Документ37 страницGear Chikuku 1Kelvin Kindice MapurisaОценок пока нет
- Qualitative of Machine Component DesignДокумент22 страницыQualitative of Machine Component DesignRicky YeohОценок пока нет
- Harmonic GearДокумент10 страницHarmonic GearMaintenance HalolОценок пока нет
- Project On Solar Treadmill BicycleДокумент22 страницыProject On Solar Treadmill BicycleIshwarjit SinghОценок пока нет
- Application of Chain Drive and Its Selection Method in AutomobileДокумент18 страницApplication of Chain Drive and Its Selection Method in AutomobileSankit IngaleОценок пока нет
- Application of Chain Drive and Its Selection Method in AutomobileДокумент18 страницApplication of Chain Drive and Its Selection Method in AutomobileSumedh sonawaneОценок пока нет
- Application of Chain Drive and Its Selection Method in AutomobileДокумент18 страницApplication of Chain Drive and Its Selection Method in Automobilesoham57% (7)
- Chain Less BicycleДокумент20 страницChain Less BicycleSankalp HiremathОценок пока нет
- Chain Drive and Its TypesДокумент6 страницChain Drive and Its TypesvigneshОценок пока нет
- Belt and Chain VcetДокумент56 страницBelt and Chain VcetgowthamkuttiОценок пока нет
- Power Transmission PDFДокумент89 страницPower Transmission PDFKumar Rajesh85% (54)
- Seminor PPT On Self Balancing UnicycleДокумент19 страницSeminor PPT On Self Balancing UnicycleSumit Katiyar100% (2)
- Solar Tredmil BicycleДокумент19 страницSolar Tredmil BicycleIshwarjit SinghОценок пока нет
- CHAINS and SPROCKETS (Types, Application, Advantages, Disadvantages)Документ18 страницCHAINS and SPROCKETS (Types, Application, Advantages, Disadvantages)MelindaОценок пока нет
- Gears Compilation, Solis TrevДокумент15 страницGears Compilation, Solis TrevTrev SolisОценок пока нет
- Design Project Spur GearДокумент5 страницDesign Project Spur GearAbel BatuОценок пока нет
- 1 - DJJ6153 Topic 3Документ25 страниц1 - DJJ6153 Topic 3Kroof KayОценок пока нет
- Hand Clutch For Handicapped Person ReportДокумент56 страницHand Clutch For Handicapped Person ReportSesha Thri0% (1)
- Discussion: Spur Gear & Helical Gears: Cutaway ModelДокумент6 страницDiscussion: Spur Gear & Helical Gears: Cutaway ModelRanu GamesОценок пока нет
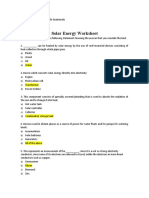
- Solar Energy Worksheet: Instructions: Complete The Following Statement Choosing The Answer That You Consider The BestДокумент4 страницыSolar Energy Worksheet: Instructions: Complete The Following Statement Choosing The Answer That You Consider The BestCarlos SanchezОценок пока нет
- Belt PDFДокумент61 страницаBelt PDFAssdОценок пока нет
- Report 17pg.Документ14 страницReport 17pg.AchuthanОценок пока нет
- The Klann Linkage Is A PlanarДокумент17 страницThe Klann Linkage Is A PlanarslitantОценок пока нет
- Chain Drives: Prasad Ghorpade Chain Drive Mechanical EngineeringДокумент3 страницыChain Drives: Prasad Ghorpade Chain Drive Mechanical EngineeringEu AumentadoОценок пока нет
- Inerter Based Suspension SystemsДокумент19 страницInerter Based Suspension SystemsDarshit PatelОценок пока нет
- Gearless Mechanism at Right AngleДокумент13 страницGearless Mechanism at Right AngleAkshay Tatkare100% (1)
- How Does A Gearbox Work?Документ10 страницHow Does A Gearbox Work?ihatethisshitОценок пока нет
- Tutorial 3 Josephine Bakewa IDДокумент10 страницTutorial 3 Josephine Bakewa IDJosephine BakewaОценок пока нет
- Chapter 6: Mechanical Equipment Maintenance 6.2 GEARSДокумент5 страницChapter 6: Mechanical Equipment Maintenance 6.2 GEARSChee Onn0% (1)
- Internal GearsДокумент9 страницInternal GearsGoutam AcharjeeОценок пока нет
- Rahul DTS 1stДокумент19 страницRahul DTS 1stOmkarОценок пока нет
- Power Generation Using See Saw MechanismДокумент17 страницPower Generation Using See Saw MechanismAnuj NishadОценок пока нет
- Gears Compilation, Solis TrevДокумент15 страницGears Compilation, Solis TrevKarl Kuis SantanderОценок пока нет
- De-2 PPT NewДокумент16 страницDe-2 PPT NewKundan SavaliyaОценок пока нет
- Machine Element Design New Approach: Week 2Документ47 страницMachine Element Design New Approach: Week 2GursharanSinghGandhiОценок пока нет
- Chainless BycycleДокумент14 страницChainless BycycleABHISHEK CHOUDHARIОценок пока нет
- Linear Motor BasicДокумент7 страницLinear Motor BasicSairam SirasapalliОценок пока нет
- Wilber Motor:: Wheel Chain Track Gear PulleyДокумент6 страницWilber Motor:: Wheel Chain Track Gear Pulleypramo_dassОценок пока нет
- Lab 1Документ8 страницLab 1Mansoob BukhariОценок пока нет
- Gyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Документ18 страницGyroscopic Effect (Theory of Machines E-Note 10122015 030631AM)Vasudev GuptaОценок пока нет
- Gear MechanismsДокумент4 страницыGear MechanismsNaftali OmuhandeОценок пока нет
- Kassahun Tadess GeerboxДокумент16 страницKassahun Tadess Geerboxabubekery61Оценок пока нет
- Belt DrivesДокумент21 страницаBelt DrivesRevanth ReddyОценок пока нет
- Tri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewДокумент23 страницыTri Wheeled Solar Powered Electric Vehicle PPT For 3rd ReviewVineel Vihar100% (1)
- 1st Assignment of MMCДокумент9 страниц1st Assignment of MMCAwais Asghar KhanОценок пока нет
- CPM 0250 Water Pumping System Using River Force DevДокумент9 страницCPM 0250 Water Pumping System Using River Force DevmanjunathОценок пока нет
- Project Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowДокумент21 страницаProject Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowAnoop SinghОценок пока нет
- Report On Chain Mechanism For PrintДокумент13 страницReport On Chain Mechanism For PrintTanveer WaniОценок пока нет
- Spur Gears Pro Vs ConsДокумент8 страницSpur Gears Pro Vs ConsJohannes WallaceОценок пока нет
- Topic 3 - Power - TransmissionДокумент25 страницTopic 3 - Power - TransmissionNazuan NazriОценок пока нет
- Advantages and Disadvantages of GearsДокумент3 страницыAdvantages and Disadvantages of GearsRonald Patricio Vaca GuadalupeОценок пока нет
- Gear TrainДокумент28 страницGear TrainMahesh SalotagiОценок пока нет
- Gear& Gear Trains PDFДокумент55 страницGear& Gear Trains PDFSumit SumanОценок пока нет
- Chapter 2 Notes - BME - May - 2023Документ49 страницChapter 2 Notes - BME - May - 2023gamingendless003Оценок пока нет
- ProjectДокумент10 страницProjectMUHAMMAD RASHIDОценок пока нет
- Experiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshДокумент3 страницыExperiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshParas KumbalwarОценок пока нет
- Chapter - 1Документ34 страницыChapter - 1Yuva RajОценок пока нет
- 2 Motor Driver IC L2936D: Mosfet 1 Mosfet 2Документ5 страниц2 Motor Driver IC L2936D: Mosfet 1 Mosfet 2Anuj TripathiОценок пока нет
- Name Roll No Name Roll No Name Roll No Name Roll NoДокумент11 страницName Roll No Name Roll No Name Roll No Name Roll NoAnuj TripathiОценок пока нет
- Human Detection Robot Using PIR SensorДокумент16 страницHuman Detection Robot Using PIR SensorAnuj TripathiОценок пока нет
- Name Roll No Name Roll No Name Roll No Name Roll NoДокумент10 страницName Roll No Name Roll No Name Roll No Name Roll NoAnuj TripathiОценок пока нет
- ProgresДокумент11 страницProgresAnuj TripathiОценок пока нет
- Field Hockey StickДокумент10 страницField Hockey StickAnuj TripathiОценок пока нет
- Personal Computer Load ControlДокумент17 страницPersonal Computer Load ControlAnuj TripathiОценок пока нет
- Flood ControlДокумент39 страницFlood ControlAnuj TripathiОценок пока нет
- Design and F Abrication of Working Model of Abrasive Jet Mac HineДокумент20 страницDesign and F Abrication of Working Model of Abrasive Jet Mac HineAnuj TripathiОценок пока нет
- (1-9) Floor PLAN PLAN (Door & Windows) C C Dimension of Plan (In FT.)Документ1 страница(1-9) Floor PLAN PLAN (Door & Windows) C C Dimension of Plan (In FT.)Anuj TripathiОценок пока нет
- Shredder MachineДокумент15 страницShredder MachineAnuj TripathiОценок пока нет
- United College of Engineering & Management AllahabadДокумент13 страницUnited College of Engineering & Management AllahabadAnuj TripathiОценок пока нет
- Structural Analysis and Design of Residential BuildingДокумент16 страницStructural Analysis and Design of Residential BuildingAnuj TripathiОценок пока нет
- Efficient Utilisastion of Hybrid Power Plant Using MPPT Technique and Reducing The Voltage Intrupption by Using DstatcomДокумент17 страницEfficient Utilisastion of Hybrid Power Plant Using MPPT Technique and Reducing The Voltage Intrupption by Using DstatcomAnuj TripathiОценок пока нет
- Submitted in Partial Fulfillment of The Requirements For The Award ofДокумент25 страницSubmitted in Partial Fulfillment of The Requirements For The Award ofAnuj TripathiОценок пока нет
- Climate Navigator For Smart CarДокумент18 страницClimate Navigator For Smart CarAnuj TripathiОценок пока нет
- AlgorithmДокумент2 страницыAlgorithmAnuj TripathiОценок пока нет
- Bluetooth Washing MachineДокумент19 страницBluetooth Washing MachineAnuj TripathiОценок пока нет
- Updated Project TemplateДокумент7 страницUpdated Project TemplateAnuj TripathiОценок пока нет
- Vehicle Ignition SystemДокумент12 страницVehicle Ignition SystemAnuj TripathiОценок пока нет
- Motor Speed Control Using GSMДокумент12 страницMotor Speed Control Using GSMAnuj TripathiОценок пока нет
- Android GameДокумент27 страницAndroid GameAnuj TripathiОценок пока нет
- Project Progress ReportДокумент6 страницProject Progress ReportAnuj TripathiОценок пока нет
- Microcontroller AT89S52: Important Features and ApplicationsДокумент17 страницMicrocontroller AT89S52: Important Features and ApplicationsAnuj TripathiОценок пока нет
- Analysis On Performance of Different Parameters During Abrasive Jet Machining by Taguchi MethodДокумент7 страницAnalysis On Performance of Different Parameters During Abrasive Jet Machining by Taguchi MethodAnuj TripathiОценок пока нет
- Admin: Projects That The City Is Working OnДокумент5 страницAdmin: Projects That The City Is Working OnAnuj TripathiОценок пока нет
- Design and Fabrications of Abrasive Jet Machine: Presented byДокумент31 страницаDesign and Fabrications of Abrasive Jet Machine: Presented byAnuj TripathiОценок пока нет
- A Project Report ON: Speed Control of DC Motor Using GSM ModuleДокумент71 страницаA Project Report ON: Speed Control of DC Motor Using GSM ModuleAnuj TripathiОценок пока нет
- Engineering Properties of Insulation Material Made With Cotton Waste and y AshДокумент9 страницEngineering Properties of Insulation Material Made With Cotton Waste and y AshShakti DubeyОценок пока нет
- Level-Ii (C.W) Electric Current and Drift Velocity Ohm'S Law and Combination or ResistancesДокумент10 страницLevel-Ii (C.W) Electric Current and Drift Velocity Ohm'S Law and Combination or Resistanceschaaru lathaОценок пока нет
- Non Mechanical Properties of MaterialsДокумент10 страницNon Mechanical Properties of Materialscataice100% (1)
- Sheet 1 InductanceДокумент2 страницыSheet 1 Inductancemoustafa mouhammedОценок пока нет
- Ryton QC160N and QC160P: Polyphenylene Sulfide AlloysДокумент2 страницыRyton QC160N and QC160P: Polyphenylene Sulfide AlloysJustin HendrixОценок пока нет
- Tips and Trick PetrelДокумент5 страницTips and Trick PetrelAdi Danu100% (2)
- 07-Body Composition in Athletes. Assessment and Estimated FatnessДокумент32 страницы07-Body Composition in Athletes. Assessment and Estimated Fatnessapi-385123986% (7)
- 95 459 01 Xiameter PMX 561 Transformer LiquidДокумент4 страницы95 459 01 Xiameter PMX 561 Transformer LiquidRadyan PradiptaОценок пока нет
- ACSR PAnether Stringing Upto 350 MtrsДокумент61 страницаACSR PAnether Stringing Upto 350 Mtrspsvsridhar100% (1)
- Thermal Properties of Electrical ConductorsДокумент28 страницThermal Properties of Electrical ConductorshpavleОценок пока нет
- Results in Materials: C. Banganayi, K. Nyembwe, K. MagezaДокумент5 страницResults in Materials: C. Banganayi, K. Nyembwe, K. MagezaFelice SegaОценок пока нет
- EDC Notes PDFДокумент377 страницEDC Notes PDFscribdcurrenttextОценок пока нет
- Chapter 12Документ18 страницChapter 12Anshul GautampurkarОценок пока нет
- Springer Series in Materials Science: Series Editors: Z.M. Wang C. Jagadish R. Hull R.M. Osgood J. ParisiДокумент370 страницSpringer Series in Materials Science: Series Editors: Z.M. Wang C. Jagadish R. Hull R.M. Osgood J. ParisiMariana PèrezОценок пока нет
- Electronics and Micrprocessor NotesДокумент95 страницElectronics and Micrprocessor NotesSam SureshОценок пока нет
- Note 03 (Electrochemistry) PDFДокумент13 страницNote 03 (Electrochemistry) PDFAnowar HossainОценок пока нет
- Excel Spreadsheet 3.6.4Документ5 страницExcel Spreadsheet 3.6.4Neelkantho Bose100% (1)
- Llautó M38 CuZn37Документ2 страницыLlautó M38 CuZn37Josep TanuОценок пока нет
- Entrooy Generation MinimizationДокумент29 страницEntrooy Generation MinimizationjaziyuvОценок пока нет
- Mohamed Abd Elwahab Ali - Chapter 3. Power CablesДокумент56 страницMohamed Abd Elwahab Ali - Chapter 3. Power CablesraghvendraОценок пока нет
- Manganese 12 14%Документ3 страницыManganese 12 14%Sreedhar Rakesh VellankiОценок пока нет
- ElectricityДокумент161 страницаElectricityamanОценок пока нет
- Practice Set - 4Документ2 страницыPractice Set - 4rishavkmОценок пока нет
- Basics Instrument and ControlДокумент222 страницыBasics Instrument and ControlSamuel OnyewuenyiОценок пока нет
- Air Pollution Control TechДокумент71 страницаAir Pollution Control TechvivekОценок пока нет
- Currentandresistance: 4.1 Electric CurrentДокумент15 страницCurrentandresistance: 4.1 Electric CurrentLuqman HakimОценок пока нет
- Guide To Storage Tanks and EquipmentДокумент15 страницGuide To Storage Tanks and EquipmentbadelitamariusОценок пока нет
- LDG PDFДокумент94 страницыLDG PDFsourabhadiОценок пока нет
- Work Function Measurements in Single-Crystalline In2O3 For Conduction Modelling PDFДокумент3 страницыWork Function Measurements in Single-Crystalline In2O3 For Conduction Modelling PDFNipin KohliОценок пока нет
- Al-Doped TiO2 Films With Ultralow Leakage Currents For Next Generation DRAM CapacitorsДокумент7 страницAl-Doped TiO2 Films With Ultralow Leakage Currents For Next Generation DRAM CapacitorsSoheil MirtalebiОценок пока нет