Вам также может понравиться
- Electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209От EverandElectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Рейтинг: 2 из 5 звезд2/5 (1)
- Especificaciones Proyecto 2021Документ9 страницEspecificaciones Proyecto 2021Mauricio MoralesОценок пока нет
- N3 Rapido ComezarДокумент2 страницыN3 Rapido ComezarAdrian GarciaОценок пока нет
- Proyectos de instalaciones eléctrica de baja tensiónОт EverandProyectos de instalaciones eléctrica de baja tensiónРейтинг: 5 из 5 звезд5/5 (1)
- Especificaciones Proyecto 2018Документ9 страницEspecificaciones Proyecto 2018Luis Bastian Sandoval RojasОценок пока нет
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109От EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Оценок пока нет
- 2 - Diagrama Elctrico - Motor 1.8 lts-66 KW - ADDДокумент9 страниц2 - Diagrama Elctrico - Motor 1.8 lts-66 KW - ADDsanach0412100% (2)
- Presntacion Iiam Transmision Power Shift.Документ43 страницыPresntacion Iiam Transmision Power Shift.Hector GarciaОценок пока нет
- Montaje de redes eléctricas aéreas de baja tensión. ELEE0109От EverandMontaje de redes eléctricas aéreas de baja tensión. ELEE0109Оценок пока нет
- INVERTER GENERAL Presentacion - Tec2Документ36 страницINVERTER GENERAL Presentacion - Tec2Daniel VicentinОценок пока нет
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209От EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Рейтинг: 1 из 5 звезд1/5 (2)
- Electronica en AA Unidades Interiores on-OfFДокумент18 страницElectronica en AA Unidades Interiores on-OfFJohan MateranОценок пока нет
- 21-06. - Formacion Didactica M33 Parte ElectricaДокумент38 страниц21-06. - Formacion Didactica M33 Parte ElectricatoufikОценок пока нет
- Practica 2Документ6 страницPractica 2NataliaОценок пока нет
- #Ttcpecfqtrctcn Orctcufgjcnqigpwtquogv Nkequ: Ignitor For Metal Halide LampsДокумент1 страница#Ttcpecfqtrctcn Orctcufgjcnqigpwtquogv Nkequ: Ignitor For Metal Halide Lampspaolo gonzalo padilla gonzalesОценок пока нет
- Mono 2015 IДокумент2 страницыMono 2015 IKatherine María Zambrano CasasОценок пока нет
- 33.4 - TOYOTA HIACE 2005-2016 A GASOLINA 2.7 L-4-De-4..Документ12 страниц33.4 - TOYOTA HIACE 2005-2016 A GASOLINA 2.7 L-4-De-4..anadaisyramirezhernandezОценок пока нет
- Automatismos Electricos 2022Документ14 страницAutomatismos Electricos 2022Licenciatura utnvwОценок пока нет
- m10 Manual InstruccionesДокумент15 страницm10 Manual InstruccionesLeonel IntriagoОценок пока нет
- Motor Franklin 22A19-24.005318Документ1 страницаMotor Franklin 22A19-24.005318Leonel Basoalto EspinozaОценок пока нет
- Taller 3 - Parte BДокумент20 страницTaller 3 - Parte BOmarlily11 guerreroОценок пока нет
- Máquina Envasadora ConexionesДокумент8 страницMáquina Envasadora ConexionesJuan Esteban Moreno VeraОценок пока нет
- 12 Descripción General - EspañolДокумент44 страницы12 Descripción General - EspañolCarlos ZaSa100% (1)
- Amarok Fusibles y DiagramaДокумент23 страницыAmarok Fusibles y DiagramaJuan Carlos Arias100% (1)
- Circuitos de Conexión PLC S7-200Документ5 страницCircuitos de Conexión PLC S7-200Joelyiyi PereОценок пока нет
- LAB4 MPS DistribucionДокумент18 страницLAB4 MPS DistribucionMaría José HerreraОценок пока нет
- 8-11 Servomecanismo Con Motor de Corriente DirectaДокумент3 страницы8-11 Servomecanismo Con Motor de Corriente DirectaGARY GABRIEL RAMOS PASTRANAОценок пока нет
- Análisis del motor de inducción trifásico de jaula de ardillaДокумент9 страницAnálisis del motor de inducción trifásico de jaula de ardillaElías ArriolaОценок пока нет
- Motor trifásico de rotor devanado: partes y característicasДокумент5 страницMotor trifásico de rotor devanado: partes y característicasJulio Cesar Dominguez RОценок пока нет
- Q35 CentralДокумент7 страницQ35 CentralVela BocaОценок пока нет
- Cuadro de Cargas - 20100447Документ4 страницыCuadro de Cargas - 20100447MIGUEL GONZALEZ DIAZОценок пока нет
- Diagramas - Máquina EnvasadoraДокумент4 страницыDiagramas - Máquina EnvasadoraJuan Esteban Moreno VeraОценок пока нет
- Elctronica Analogica SimДокумент3 страницыElctronica Analogica SimJosé Manuel Martínez RomeroОценок пока нет
- Practica Rectificadores Media Onda Onda CompletaДокумент8 страницPractica Rectificadores Media Onda Onda CompletaEfra AlcoserОценок пока нет
- Práctica No 4: Práctica No 4 Curvas Características y Control de Velocidad. en Un Motor de Rotor DevanadoДокумент8 страницPráctica No 4: Práctica No 4 Curvas Características y Control de Velocidad. en Un Motor de Rotor DevanadoDULCE GARCIAОценок пока нет
- ManualCableadoHinoДокумент212 страницManualCableadoHinoWalter Eduard96% (24)
- Cliente - Esquema Girador Escuadrador Nº24Документ9 страницCliente - Esquema Girador Escuadrador Nº24lrulОценок пока нет
- 4-Fallas Tipicas y Soluciones CM-LITEДокумент4 страницы4-Fallas Tipicas y Soluciones CM-LITEFrancisco Martinez82% (11)
- DIRECCIÓNДокумент2 страницыDIRECCIÓNIng Rodolfo OlguinОценок пока нет
- MCD200Документ10 страницMCD200Yusef Nome C.Оценок пока нет
- HC - 009 - Requerimiento Del Grupo ElectrogenoДокумент10 страницHC - 009 - Requerimiento Del Grupo ElectrogenoHawellNickolasHuarzoОценок пока нет
- Ce TL3Документ2 страницыCe TL3pepeОценок пока нет
- L5 Motor Jaula de Ardilla-1Документ9 страницL5 Motor Jaula de Ardilla-1Luis emanuel Quise caballeroОценок пока нет
- Compensacion ReactivaДокумент11 страницCompensacion Reactivajose luisОценок пока нет
- Informe - Motores 7 PARA ENTREGARДокумент16 страницInforme - Motores 7 PARA ENTREGARMaximiliano QueralesОценок пока нет
- Practica Adicional UTEQ Transferencia de Material PLC MICROLOGIX1000Документ1 страницаPractica Adicional UTEQ Transferencia de Material PLC MICROLOGIX1000Eduardo HernandezОценок пока нет
- Arrancador Suave DocumentoДокумент2 страницыArrancador Suave DocumentoRolando MolinaОценок пока нет
- R 3Документ22 страницыR 3Kate KateОценок пока нет
- Reporte de Convertidores de Señales y Avances Del Proyecto Integrador de Hugo Yael Aceves RiveraДокумент7 страницReporte de Convertidores de Señales y Avances Del Proyecto Integrador de Hugo Yael Aceves RiveraMagii DiazОценок пока нет
- Imtm Ei Practica 5Документ4 страницыImtm Ei Practica 5rafael salas munosОценок пока нет
- CM Lite1 LLL CM Triac LTДокумент7 страницCM Lite1 LLL CM Triac LTFranciscoGrillet100% (7)
- Selección de protecciones y arranque para 8 motoresДокумент4 страницыSelección de protecciones y arranque para 8 motoreskevin mintaОценок пока нет
- Item.07 04.04.07.02.01 TCB-PS-01 2.0HPДокумент11 страницItem.07 04.04.07.02.01 TCB-PS-01 2.0HPCESAR AUGUSTO DIAZ YAFACОценок пока нет
- Motor Toshiba 3 HP - OptДокумент4 страницыMotor Toshiba 3 HP - OptCarlos MolinaОценок пока нет
- 04 Motor Sincrono de Anillos RozantesДокумент9 страниц04 Motor Sincrono de Anillos RozantesJuanBertiAyteGonzalesОценок пока нет
- LVSIM-EMS - Reconocimiento de La OndaДокумент2 страницыLVSIM-EMS - Reconocimiento de La OndaClaudio HernándezОценок пока нет
- Lvsim EmsДокумент1 страницаLvsim EmsAntonioVelizОценок пока нет
- Lvsim EmsДокумент1 страницаLvsim EmsAntonioVelizОценок пока нет
- Diagramas de Fuentes PCДокумент62 страницыDiagramas de Fuentes PCDomingo ArroyoОценок пока нет
- Emisora de FM de 1WДокумент10 страницEmisora de FM de 1WDomingo ArroyoОценок пока нет
- Sumadores y RestadoresДокумент10 страницSumadores y RestadoresDomingo ArroyoОценок пока нет
- 08 Empalmes PDFДокумент14 страниц08 Empalmes PDFNathalia Ledesma GarcíaОценок пока нет
- Circuitos Con Diodos.-Diodos ZenerДокумент31 страницаCircuitos Con Diodos.-Diodos ZenerDario GalarzaОценок пока нет
- Practica 6 Curvas Del TransistorДокумент10 страницPractica 6 Curvas Del TransistorDomingo ArroyoОценок пока нет
- Emisora Experimental de FMДокумент5 страницEmisora Experimental de FMAlexis DurangoОценок пока нет
- Interrupciones PICДокумент43 страницыInterrupciones PICDomingo ArroyoОценок пока нет
- Televisor LCD LedДокумент17 страницTelevisor LCD LedDomingo Arroyo100% (1)
- 08 Empalmes PDFДокумент14 страниц08 Empalmes PDFNathalia Ledesma GarcíaОценок пока нет
- 08 Empalmes PDFДокумент14 страниц08 Empalmes PDFNathalia Ledesma GarcíaОценок пока нет
- 08 Empalmes PDFДокумент14 страниц08 Empalmes PDFNathalia Ledesma GarcíaОценок пока нет
- Timer, Practicas de MicroProgramables DRBДокумент7 страницTimer, Practicas de MicroProgramables DRBDomingo ArroyoОценок пока нет
- 6CA FiltrosДокумент15 страниц6CA FiltrosAlejandro Ledesma NeriОценок пока нет
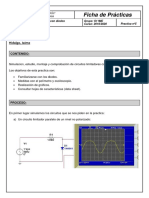
- Ceapráctica Nº5. Circuitos Limitadores Con DiodosДокумент1 страницаCeapráctica Nº5. Circuitos Limitadores Con DiodosDomingo ArroyoОценок пока нет
- Aporte Sobre Como Se Almacenan Datos.Документ10 страницAporte Sobre Como Se Almacenan Datos.willygonzalez888Оценок пока нет
- CircuitosDiodosДокумент5 страницCircuitosDiodosDomingo ArroyoОценок пока нет
- Timer, Practicas de MicroProgramables DRBДокумент7 страницTimer, Practicas de MicroProgramables DRBDomingo ArroyoОценок пока нет
- Arrays y ArduinoДокумент10 страницArrays y ArduinoDomingo ArroyoОценок пока нет
- UD3 - 2 - Multiplexores y DemultiplexoresДокумент4 страницыUD3 - 2 - Multiplexores y DemultiplexoresDomingo ArroyoОценок пока нет
- Tipos de Datos Arrays en Arduino.Документ5 страницTipos de Datos Arrays en Arduino.Domingo ArroyoОценок пока нет
- Práctica 4. Introducción A ProteusДокумент2 страницыPráctica 4. Introducción A ProteusDomingo ArroyoОценок пока нет
- Secuencia 6 Leds Ece Con Arduino FZZДокумент6 страницSecuencia 6 Leds Ece Con Arduino FZZErick David Lopez HuamanОценок пока нет
- Diodos de PotenciaДокумент33 страницыDiodos de PotenciaJonathan Raul Alvarez LopezОценок пока нет
- Programación con Arduino y C++: Introducción al lenguaje de programaciónДокумент37 страницProgramación con Arduino y C++: Introducción al lenguaje de programaciónDomingo Arroyo100% (1)
- Programacion CXX PDFДокумент205 страницProgramacion CXX PDFjoseОценок пока нет
- 2018 SpanishДокумент16 страниц2018 SpanishDomingo Arroyo100% (1)
- CircuitosDiodosДокумент5 страницCircuitosDiodosDomingo ArroyoОценок пока нет
- LNK02440Документ4 страницыLNK02440Domingo Arroyo100% (1)
- GuiaEjercicios C Cprog UNCA 2012Документ45 страницGuiaEjercicios C Cprog UNCA 2012mcnoriegaОценок пока нет
- 189 - PDFsam - Refactoring UI v1.0.2.Документ30 страниц189 - PDFsam - Refactoring UI v1.0.2.Jose Daniel Orio IslasОценок пока нет
- Tutorial Net SNMP PDFДокумент25 страницTutorial Net SNMP PDFLarry FjcОценок пока нет
- Interfaces y Procesos InformáticosДокумент2 страницыInterfaces y Procesos InformáticosJuan Carlos HernandezОценок пока нет
- Mecanizado Parte 1 Univ Buenos AiresДокумент110 страницMecanizado Parte 1 Univ Buenos Airescarmelotomas100% (1)
- Unidad HP Externa USB DVDRW (F2B56AA) - HP® MéxicoДокумент2 страницыUnidad HP Externa USB DVDRW (F2B56AA) - HP® MéxicoGomez, Francisco (AJR)Оценок пока нет
- 87 Eje1 t4Документ14 страниц87 Eje1 t4erojasОценок пока нет
- Ejemplo 7 Administración Del RendimientoДокумент6 страницEjemplo 7 Administración Del RendimientoLvisMorenoCamachoОценок пока нет
- Implementar La Solución de Software de Acuerdo Con Requisitos de Operación y Modelos de ReferenciaДокумент5 страницImplementar La Solución de Software de Acuerdo Con Requisitos de Operación y Modelos de ReferenciaRobert Nicolas Ferro CanoОценок пока нет
- Adobe AcrobatДокумент463 страницыAdobe AcrobatJosé Manuel Hita SeguraОценок пока нет
- Prog1-I02 - Clases Objetos y MetodosДокумент15 страницProg1-I02 - Clases Objetos y MetodosDante Alvarado TokomoОценок пока нет
- 92% de Los Bancos Top 25 en América Latina Usan Soluciones SAPДокумент2 страницы92% de Los Bancos Top 25 en América Latina Usan Soluciones SAPTecnología 21Оценок пока нет
- Mapa Mental Trabajo AutonomoДокумент1 страницаMapa Mental Trabajo AutonomoEve PsОценок пока нет
- Atmega 328p EspañolДокумент448 страницAtmega 328p EspañolvertiaguaОценок пока нет
- Seguridad InformáticaДокумент8 страницSeguridad InformáticaRichard ParkerОценок пока нет
- Como Quitar Protección de Escritura en Tu USBДокумент41 страницаComo Quitar Protección de Escritura en Tu USBAlexОценок пока нет
- GSSolutionsGuide SpanishДокумент19 страницGSSolutionsGuide Spanishjose luis facundo flores aguileraОценок пока нет
- Fo-Qu-03 Listado Maestro Documentos ManufacturaДокумент3 страницыFo-Qu-03 Listado Maestro Documentos ManufacturaalixОценок пока нет
- Proteccion Seguridad LogicaДокумент1 страницаProteccion Seguridad LogicaPriscila RiosОценок пока нет
- Sistemas operativos, periféricos, formatos y procesosДокумент5 страницSistemas operativos, periféricos, formatos y procesosanthony0% (1)
- Scratch (Lenguaje de Programación)Документ7 страницScratch (Lenguaje de Programación)juandavidОценок пока нет
- Taller - 02 Hacking Reversing AppsДокумент12 страницTaller - 02 Hacking Reversing AppsCristóbal HerreraОценок пока нет
- Trabajo 3 Tecnico Asistente - Auxiliar Administrativo - HERRAMIENTAS TECNOLÓGICAS APLICADASДокумент3 страницыTrabajo 3 Tecnico Asistente - Auxiliar Administrativo - HERRAMIENTAS TECNOLÓGICAS APLICADASMaria Caro Gaviria50% (4)
- Mejoramiento y ampliación de los servicios profesionales en la Universidad Nacional Intercultural de la Selva CentralДокумент1 страницаMejoramiento y ampliación de los servicios profesionales en la Universidad Nacional Intercultural de la Selva Centralozelwill5388Оценок пока нет
- Fundamentos, Ventajas y Desventajas de La Ing ConcurrenteДокумент9 страницFundamentos, Ventajas y Desventajas de La Ing ConcurrenteJorge Alvites CardenasОценок пока нет
- Especificaciones Técnicas Teléfono IPДокумент3 страницыEspecificaciones Técnicas Teléfono IPJosue Luigi VilcapomaОценок пока нет
- Guia de 7° #2 de Ii Periodo - 2021-La EntrevistaДокумент1 страницаGuia de 7° #2 de Ii Periodo - 2021-La Entrevistafermin andres salas salgadoОценок пока нет
- Virus Informatico - Adriana Rovira 6toДокумент21 страницаVirus Informatico - Adriana Rovira 6toERICA MONTANO100% (1)
- Ley de Coulomb laboratorio ingeniería informáticaДокумент5 страницLey de Coulomb laboratorio ingeniería informáticaAlvaroОценок пока нет
- SQL - Tutorial ETL - Parte 3Документ29 страницSQL - Tutorial ETL - Parte 3Daniel Sánchez OcampoОценок пока нет
- Notas AVR Maestría Parte2Документ147 страницNotas AVR Maestría Parte2Seminario InvestigaciónОценок пока нет