Вам также может понравиться
- YaRrr BookДокумент247 страницYaRrr BookBaalaji RavichandranОценок пока нет
- IDOCs (For Functional Consultants - Set Up & Trouble Shooting)Документ33 страницыIDOCs (For Functional Consultants - Set Up & Trouble Shooting)Rajat Kapoor100% (1)
- Visible Surface Detection AlgorithmsДокумент21 страницаVisible Surface Detection AlgorithmsTara ElanОценок пока нет
- Scan Line Method: Submitted To: Prof. RatneshДокумент11 страницScan Line Method: Submitted To: Prof. Ratneshtanvi gargОценок пока нет
- Visible SurfaceДокумент23 страницыVisible SurfacePrachiОценок пока нет
- Plane TableДокумент40 страницPlane TableShiva ShankariОценок пока нет
- Computer Graphics RCS-603 Unit-V: Dr. Vinod Jain (Associate Professor, GLBITM)Документ72 страницыComputer Graphics RCS-603 Unit-V: Dr. Vinod Jain (Associate Professor, GLBITM)Dilbag Rai AhujaОценок пока нет
- Plane Table SurveyДокумент49 страницPlane Table SurveyRajiv Kumar100% (2)
- Computer Graphics 14Документ4 страницыComputer Graphics 14Kranthi KumarОценок пока нет
- Module 4Документ10 страницModule 4Ravi Achu PОценок пока нет
- Module V-PPT - 2Документ58 страницModule V-PPT - 2Rajeswari RОценок пока нет
- V Hidden Lines and Surfaces: Back Face Detection Algorithm, Depth 2. Basic Illumination Models - Ambient Light, Diffuse ReflectionДокумент69 страницV Hidden Lines and Surfaces: Back Face Detection Algorithm, Depth 2. Basic Illumination Models - Ambient Light, Diffuse Reflectionmuskaan mahajanОценок пока нет
- Plane Table Survey: Unit-VIДокумент88 страницPlane Table Survey: Unit-VIArthesh BasakОценок пока нет
- Lecture 12 - Plane Table SurveyingДокумент101 страницаLecture 12 - Plane Table SurveyingMuhammad UsamaОценок пока нет
- Unit 4 - FinalДокумент38 страницUnit 4 - FinalOmkar DalviОценок пока нет
- Unit 5 ContouringДокумент28 страницUnit 5 Contouring121915501016 gitamОценок пока нет
- Plane TableДокумент93 страницыPlane TableIrfanButtОценок пока нет
- Unit Iv - Part IДокумент76 страницUnit Iv - Part IVamsi KrishnaОценок пока нет
- Plane Table SurveyДокумент82 страницыPlane Table SurveyMahesh PalОценок пока нет
- Plane Table SДокумент88 страницPlane Table SfrajoОценок пока нет
- Plane Table Surveying-Mahesh PalДокумент77 страницPlane Table Surveying-Mahesh PalPriyanshu YadavОценок пока нет
- Plane Table Surveying: Maj Dr. JawedДокумент38 страницPlane Table Surveying: Maj Dr. JawedMuhammad Jawed Iqbal100% (1)
- Visible Surface DetectДокумент27 страницVisible Surface Detectnasrin1111111Оценок пока нет
- UNIT-5 - Hidden Lines and SurfacesДокумент33 страницыUNIT-5 - Hidden Lines and SurfacesMahiye Ghosh100% (1)
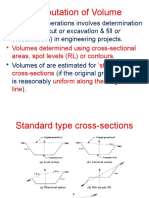
- VolumeДокумент23 страницыVolumeSaileshОценок пока нет
- Final PPT of GROUP EДокумент84 страницыFinal PPT of GROUP Egauravghimire0000Оценок пока нет
- Plane Table Survey Plane Table Survey: Unit-III Unit-IIIДокумент81 страницаPlane Table Survey Plane Table Survey: Unit-III Unit-IIICHARIОценок пока нет
- Introduction To Polygons: EdgesДокумент33 страницыIntroduction To Polygons: EdgesArko KunduОценок пока нет
- Unit 4 CGДокумент52 страницыUnit 4 CGDhruti PatelОценок пока нет
- DBT123 Chapter 6 - Calculation of Area and VolumeДокумент38 страницDBT123 Chapter 6 - Calculation of Area and Volumeiisya6232Оценок пока нет
- Petroleum Geoscience and Geophysics Chapter 9Документ49 страницPetroleum Geoscience and Geophysics Chapter 9Shu En SeowОценок пока нет
- MKPP1213 Chapter 9Документ56 страницMKPP1213 Chapter 9Haziq YussofОценок пока нет
- LevellingДокумент73 страницыLevellingLaura AzwiraОценок пока нет
- Unit-4-2 PPT CSДокумент69 страницUnit-4-2 PPT CS20R25A0420 KONDAMUDI VAMSI ANURAGОценок пока нет
- Visible Surface DeterminationДокумент62 страницыVisible Surface DeterminationqwdfghОценок пока нет
- CSE291 07 VectorCalculusДокумент53 страницыCSE291 07 VectorCalculuslu casОценок пока нет
- Visible Surface DetectionДокумент48 страницVisible Surface Detectionvenunm9Оценок пока нет
- Stereographic ProjectionДокумент5 страницStereographic Projectioncivil geotech100% (1)
- Presented By: Er. Sahil Sharma Civil Engineering DepartmentДокумент18 страницPresented By: Er. Sahil Sharma Civil Engineering DepartmentSaHil ShaRmaОценок пока нет
- Surface FlatnessДокумент24 страницыSurface Flatnessabidruet124Оценок пока нет
- CONTOURДокумент15 страницCONTOURayesha shahidОценок пока нет
- Introduction 2Документ42 страницыIntroduction 2Yafa AyyashОценок пока нет
- Trend Surface AnalysisДокумент42 страницыTrend Surface Analysisরুবিয়াস হ্যাগ্রিডОценок пока нет
- 4 Plane Table SurveyingДокумент29 страниц4 Plane Table SurveyingIbrahim MohmandОценок пока нет
- Unit 4 Plane Table SurveyingДокумент29 страницUnit 4 Plane Table Surveying121915501016 gitamОценок пока нет
- Computer Graphics: BY N.Sathish Kumar AP CSEДокумент24 страницыComputer Graphics: BY N.Sathish Kumar AP CSEمحمد طلال الدبإغОценок пока нет
- 10.6 - Surface Integrals FДокумент21 страница10.6 - Surface Integrals FKrishna ChaituОценок пока нет
- Plan Table: Engr. Muhammad Sarfraz FaizДокумент15 страницPlan Table: Engr. Muhammad Sarfraz FaizAyaz AhmedОценок пока нет
- Visual RealismДокумент29 страницVisual RealismKoushik ThyagarajanОценок пока нет
- Surveying Sahil 04-09-2020Документ27 страницSurveying Sahil 04-09-2020SaHil ShaRmaОценок пока нет
- Geography 4203 / 5203: GIS ModelingДокумент30 страницGeography 4203 / 5203: GIS Modelingchhetribharat08100% (1)
- Contouring Contour: Def. The Line of Intersection of A Level Surface With TheДокумент4 страницыContouring Contour: Def. The Line of Intersection of A Level Surface With TheAnuragShrivastavОценок пока нет
- 5 Terrain AnalysisДокумент34 страницы5 Terrain AnalysisShambel MekuyeОценок пока нет
- UNIT-1 B ContourДокумент54 страницыUNIT-1 B ContourSadam PathanОценок пока нет
- 001 Site Survey and SOIL INVESTIGATION PDFДокумент114 страниц001 Site Survey and SOIL INVESTIGATION PDFNajaf aliОценок пока нет
- Graph Data Structure PresentationДокумент23 страницыGraph Data Structure PresentationGerald KapinguraОценок пока нет
- Computer Examples: Tenenbaum, de Silva, Langford "A Global Geometric Framework For Nonlinear Dimensionality Reduction"Документ37 страницComputer Examples: Tenenbaum, de Silva, Langford "A Global Geometric Framework For Nonlinear Dimensionality Reduction"sushilnayakОценок пока нет
- Adiss Ababa Science and Techinology Universitycivil Enginering Department Surveying Ii AssignmentДокумент14 страницAdiss Ababa Science and Techinology Universitycivil Enginering Department Surveying Ii AssignmentAbdul Jewad HayredinОценок пока нет
- SURVEYING - ContouringДокумент6 страницSURVEYING - Contouringprajakta chaudhariОценок пока нет
- GE-214 ReviewerДокумент2 страницыGE-214 ReviewerLulu MalotОценок пока нет
- Multilinear Functions Of Direction And Their Uses In Differential GeometryОт EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryОценок пока нет
- Oracle Cloud Migration & IntegrationДокумент30 страницOracle Cloud Migration & IntegrationAqeel Nawaz100% (1)
- Hathway BillДокумент1 страницаHathway BillSanthoshkumar.Jayaram (CareerNet)Оценок пока нет
- Book Name Authors Publisher Amazon LinkДокумент2 страницыBook Name Authors Publisher Amazon LinkOmar ShahidОценок пока нет
- The GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsДокумент8 страницThe GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsJesús UrrietaОценок пока нет
- Native InstallДокумент64 страницыNative InstallSanthosh KrishnanОценок пока нет
- CMT Eh15Документ50 страницCMT Eh15Eletrônica Maia Comércio e ServiçosОценок пока нет
- Parkinson Disease DetectionДокумент5 страницParkinson Disease DetectionMaximiliano ThiagoОценок пока нет
- Atoll 3.1.2 Exercises Radio-Libre PDFДокумент44 страницыAtoll 3.1.2 Exercises Radio-Libre PDFsaulernestofonsecaОценок пока нет
- Release NotesДокумент6 страницRelease NotesVictor CastroОценок пока нет
- A Novel Security Framework Using Trust and Fuzzy Logic in ManetДокумент15 страницA Novel Security Framework Using Trust and Fuzzy Logic in ManetijdpsОценок пока нет
- PVCMC 0296 Us - tcm106 35825Документ233 страницыPVCMC 0296 Us - tcm106 35825enrique.riera7693Оценок пока нет
- Project ReportДокумент50 страницProject ReportKshitija Rai100% (1)
- bc10d Foxconn M730-1-01 MBX-185Документ67 страницbc10d Foxconn M730-1-01 MBX-185vnenovОценок пока нет
- Tiny PPT198Документ2 страницыTiny PPT198HerlinaОценок пока нет
- Checkpoint Sofaware Release WebДокумент31 страницаCheckpoint Sofaware Release WebjoumorОценок пока нет
- Advanced Scan I21no2Документ29 страницAdvanced Scan I21no2Jaiber SosaОценок пока нет
- Acceptable Use AgreementДокумент2 страницыAcceptable Use Agreementapi-325973069Оценок пока нет
- 2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCSДокумент16 страниц2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCScmpmarinhoОценок пока нет
- Cx93010-2X Ucmxx: Usb V.92/V.34/V.32Bis Controllered Modem With Cx20548 SmartdaaДокумент62 страницыCx93010-2X Ucmxx: Usb V.92/V.34/V.32Bis Controllered Modem With Cx20548 SmartdaaInquiryОценок пока нет
- Transactions &ConcurrencyControlДокумент40 страницTransactions &ConcurrencyControlDavid KhadkaОценок пока нет
- ANSI/BICSI 005-2016: Electronic Safety and Security (ESS) System Design and Implementation Best PracticesДокумент28 страницANSI/BICSI 005-2016: Electronic Safety and Security (ESS) System Design and Implementation Best PracticesJonnas Câmara de AbreuОценок пока нет
- Stack Data Structures in JavaДокумент14 страницStack Data Structures in JavaletsjoyОценок пока нет
- 2 Chapter 1Документ24 страницы2 Chapter 1陳信宏Оценок пока нет
- Case Study The Waterfall Model and The Agile MethodologiesДокумент7 страницCase Study The Waterfall Model and The Agile MethodologiesFekadu AlemayhuОценок пока нет
- Product Catalog: Smart Test Devices For Reliable Electric Power SystemsДокумент32 страницыProduct Catalog: Smart Test Devices For Reliable Electric Power SystemsbcqbaoОценок пока нет
- LTspiceIV FlyerДокумент2 страницыLTspiceIV FlyerAnonymous UZ5xA8Оценок пока нет
- ISDN User PartДокумент7 страницISDN User Partomjaijagdish.raiОценок пока нет
- Lesson Plan: Redesign Classroom FurnitureДокумент19 страницLesson Plan: Redesign Classroom FurnitureMariaОценок пока нет