Вам также может понравиться
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- Clase Lugar Geometrico de Las Raices IДокумент32 страницыClase Lugar Geometrico de Las Raices IJesus Tapia GallardoОценок пока нет
- Chapter 1-Root LocusДокумент52 страницыChapter 1-Root Locusmuiz_jojoОценок пока нет
- Laplace Circuit AnalysisДокумент41 страницаLaplace Circuit AnalysishibaОценок пока нет
- T FN, Pole-Zeros, Block Diagram & SFGДокумент28 страницT FN, Pole-Zeros, Block Diagram & SFGArsal AslamОценок пока нет
- Lec - 3-4 - Transfer Function and Laplace TransformДокумент54 страницыLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiОценок пока нет
- Time Response PDFДокумент104 страницыTime Response PDFMeshach KumarОценок пока нет
- VL2022230502064 Da02Документ2 страницыVL2022230502064 Da02Asmit Anand Singh 21BEE0130Оценок пока нет
- Introduction To Laplace TransformsДокумент32 страницыIntroduction To Laplace TransformsAd Man GeTigОценок пока нет
- EE 312 Lecture 7Документ20 страницEE 312 Lecture 7دكتور كونوهاОценок пока нет
- Tutorial - II EEU 08106Документ2 страницыTutorial - II EEU 08106alibdi294Оценок пока нет
- IC6701 May 18 With KeyДокумент14 страницIC6701 May 18 With KeyAnonymous yO7rcec6vuОценок пока нет
- Chapter 31AДокумент43 страницыChapter 31AHafidz HmaОценок пока нет
- Signals and Systems (Practice Questions - Laplace Transform)Документ26 страницSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Wise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Документ19 страницWise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Pahala SamosirОценок пока нет
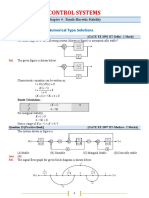
- Control Systems: GATE Objective & Numerical Type SolutionsДокумент14 страницControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganОценок пока нет
- Control - System - Chapter 5 - 8EДокумент33 страницыControl - System - Chapter 5 - 8EE24089046林雯琪Оценок пока нет
- Control Sol GA PDFДокумент342 страницыControl Sol GA PDFRishabh ShuklaОценок пока нет
- P S S S S S S L L L S S S S LL S S S S L L L LL: Forward Path: Individual Loop: Two Non-Touching Loop: DeterminantДокумент1 страницаP S S S S S S L L L S S S S LL S S S S L L L LL: Forward Path: Individual Loop: Two Non-Touching Loop: Determinantravi raviОценок пока нет
- Solutions of Differential EquationsДокумент49 страницSolutions of Differential EquationsOzi RoyОценок пока нет
- Laplace 2Документ45 страницLaplace 2stavris86Оценок пока нет
- Control Exam 1 SolutionДокумент5 страницControl Exam 1 SolutiongetugaaОценок пока нет
- LecttureIIRoot Locus Method 2Документ57 страницLecttureIIRoot Locus Method 2JmbernabeОценок пока нет
- Chapter 3Документ37 страницChapter 3Izzat AiresОценок пока нет
- 09 Z TransformДокумент34 страницы09 Z TransformBhaskarОценок пока нет
- Laplace Transform OdeДокумент24 страницыLaplace Transform OdeUmer KhanОценок пока нет
- Control System AssignmentsДокумент75 страницControl System AssignmentsSrijan DwivediОценок пока нет
- Frequency Response Method (Continue)Документ37 страницFrequency Response Method (Continue)Edo SunardyОценок пока нет
- Feedback Control Systems: Lecture Notes-12/12Документ10 страницFeedback Control Systems: Lecture Notes-12/12Aastha SinghОценок пока нет
- Tema - 8 - Sistemas - Primer y Segundo Orden (English)Документ42 страницыTema - 8 - Sistemas - Primer y Segundo Orden (English)Kevin Eduardo MartinezОценок пока нет
- 2020 10 Chapter 8 - Root LocusДокумент34 страницы2020 10 Chapter 8 - Root LocusMartin LuhutОценок пока нет
- Lecture 2 - Mathematical Model - Transfer Function and Block DiagramДокумент20 страницLecture 2 - Mathematical Model - Transfer Function and Block DiagramMouadh WahraniОценок пока нет
- System ModelingДокумент110 страницSystem ModelingYouness AITOUNYОценок пока нет
- Eem307 Midterm Fall20Документ8 страницEem307 Midterm Fall20Amil AzimliОценок пока нет
- Root Locus MethodДокумент35 страницRoot Locus MethodYasir DawoodОценок пока нет
- Tutorial 1Документ2 страницыTutorial 1Bookal RohanОценок пока нет
- Gate Problems On Signals and SystemsДокумент10 страницGate Problems On Signals and SystemsAhmedОценок пока нет
- Impulse Invariance and BilinearДокумент8 страницImpulse Invariance and BilinearAnang MarufОценок пока нет
- Root-Locus Technique For Control Design: Third YearДокумент48 страницRoot-Locus Technique For Control Design: Third YearHassan Al BaityОценок пока нет
- Lecture 2 - Mathematical Model - Transfer FunctionДокумент10 страницLecture 2 - Mathematical Model - Transfer FunctionSyamil TamlikhaОценок пока нет
- Control Systems Theory: Sinusoidal Tools STB 35103Документ42 страницыControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuОценок пока нет
- Dayalbagh Educational Institute (Deemed University), AgraДокумент3 страницыDayalbagh Educational Institute (Deemed University), AgraAkizuki TakaoОценок пока нет
- Unit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems IДокумент24 страницыUnit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems INikhil PanikkarОценок пока нет
- EE351Chap3-2.0 - Transfer FTN & SFGsДокумент19 страницEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahОценок пока нет
- Chapter2 Part C ModifiedДокумент36 страницChapter2 Part C Modifiedabed salemОценок пока нет
- EP 5511 - Lecture 04Документ29 страницEP 5511 - Lecture 04Solomon Tadesse AthlawОценок пока нет
- PID Controller BTechДокумент27 страницPID Controller BTechAkash RoyОценок пока нет
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemДокумент8 страницLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinОценок пока нет
- Screenshot 2023-05-23 at 4.29.00 PMДокумент64 страницыScreenshot 2023-05-23 at 4.29.00 PMNORASHILA BINTI KASSIM STUDENTОценок пока нет
- Updated Chapter 2 Control Systems Lecture NotesДокумент22 страницыUpdated Chapter 2 Control Systems Lecture Notesvijay rajОценок пока нет
- Laplace Transform Solution of ODEsДокумент2 страницыLaplace Transform Solution of ODEsbedodsonОценок пока нет
- 4a. Root LocusДокумент28 страниц4a. Root Locusryan manggasaОценок пока нет
- MOOC Assignment-3 Answers PDFДокумент15 страницMOOC Assignment-3 Answers PDFvamshiОценок пока нет
- Control Theory: Germán Andrés Ramos, PHDДокумент45 страницControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloОценок пока нет
- M475 - c2 - L8 - Discrete Time ModelingДокумент8 страницM475 - c2 - L8 - Discrete Time ModelingAli AlmakhmariОценок пока нет
- Math4 170513085146Документ47 страницMath4 170513085146jucar fernandezОценок пока нет
- Introduction To The Lifting SchemeДокумент15 страницIntroduction To The Lifting SchemesreenathgopalОценок пока нет
- ME311 Autumn2021 T5Документ5 страницME311 Autumn2021 T5Varun PathakОценок пока нет
- DCT-04 Openloop Closedloop DTSДокумент28 страницDCT-04 Openloop Closedloop DTSJuma MshamuОценок пока нет
- Brain Source Localization Is Inverse EEG TechniqueДокумент2 страницыBrain Source Localization Is Inverse EEG TechniqueHamza KhanОценок пока нет
- EEG Based Brain Source Localization Comparison of sLORETA and eLORETAДокумент10 страницEEG Based Brain Source Localization Comparison of sLORETA and eLORETAHamza KhanОценок пока нет
- Brain Source Localization Is Inverse EEG TechniqueДокумент14 страницBrain Source Localization Is Inverse EEG TechniqueHamza KhanОценок пока нет
- Lecture 25 Generalized Root LocusДокумент16 страницLecture 25 Generalized Root LocusHamza KhanОценок пока нет
- Lecture 12 Reduction of Multiple SubsystemsДокумент28 страницLecture 12 Reduction of Multiple SubsystemsHamza KhanОценок пока нет
- Brain Source Localization Is Inverse EEG TechniqueДокумент2 страницыBrain Source Localization Is Inverse EEG TechniqueHamza KhanОценок пока нет
- Lecture 22 Refining The RL SketchДокумент33 страницыLecture 22 Refining The RL SketchHamza KhanОценок пока нет
- Lecture 14, 15 StabilityДокумент45 страницLecture 14, 15 StabilityHamza KhanОценок пока нет
- 4-Lecture 04 Rotational Mechanical SystemsДокумент26 страниц4-Lecture 04 Rotational Mechanical SystemsHamza KhanОценок пока нет
- Lecture 13 Signal Flow Graphs and Mason, S RuleДокумент27 страницLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanОценок пока нет
- Lecture 19 Steady-State Error For Nonunity Feedback SystemsДокумент19 страницLecture 19 Steady-State Error For Nonunity Feedback SystemsHamza KhanОценок пока нет
- Lecture 21 Properties of RL and Sketching The RLДокумент22 страницыLecture 21 Properties of RL and Sketching The RLHamza KhanОценок пока нет
- Lecture 16, 17 Steady-State Error For Unity Feedback SystemДокумент29 страницLecture 16, 17 Steady-State Error For Unity Feedback SystemHamza KhanОценок пока нет
- Lecture 14 StabilityДокумент26 страницLecture 14 StabilityHamza KhanОценок пока нет
- Lecture 18 Static Error Constants and System TypeДокумент21 страницаLecture 18 Static Error Constants and System TypeHamza KhanОценок пока нет
- 14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesДокумент36 страниц14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesHamza KhanОценок пока нет
- 13-Lecture 08, 09 Time Response of Second Order SystemsДокумент32 страницы13-Lecture 08, 09 Time Response of Second Order SystemsHamza KhanОценок пока нет
- 8-Lecture 39 TF To SS and SS To TF ConversionДокумент18 страниц8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanОценок пока нет
- 12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsДокумент30 страниц12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsHamza KhanОценок пока нет
- 9-Lecture 40 Lapalace Transform SolutionДокумент7 страниц9-Lecture 40 Lapalace Transform SolutionHamza KhanОценок пока нет
- 3-Lecture 03 Translational Mechanical System3-SДокумент23 страницы3-Lecture 03 Translational Mechanical System3-SHamza KhanОценок пока нет
- 11-Lecture 06 Mdeling in Frequency DomainДокумент15 страниц11-Lecture 06 Mdeling in Frequency DomainHamza KhanОценок пока нет
- 10-Lecture 41, 42 Pole PlacementДокумент18 страниц10-Lecture 41, 42 Pole PlacementHamza KhanОценок пока нет
- 1-Lecture 01 IntroductionДокумент29 страниц1-Lecture 01 IntroductionHamza KhanОценок пока нет
- 2-Lecture 02 Electrical Networks Transfer FunctionДокумент18 страниц2-Lecture 02 Electrical Networks Transfer FunctionHamza KhanОценок пока нет
- 5-Lecture 05 Electromechanical Systems Transfer FunctionsДокумент13 страниц5-Lecture 05 Electromechanical Systems Transfer FunctionsHamza Khan100% (1)
- 7-Lecture 38 State Space RepresentationДокумент16 страниц7-Lecture 38 State Space RepresentationHamza KhanОценок пока нет
- 6-Lecture 37 Time Domain AnalysisДокумент17 страниц6-Lecture 37 Time Domain AnalysisHamza KhanОценок пока нет
- 6 1Документ19 страниц6 1Zubair AhmedОценок пока нет
- How To Improve Your MemoryДокумент2 страницыHow To Improve Your MemoryAlejandro GalvisОценок пока нет
- Safe City in Malaysia's ContextДокумент8 страницSafe City in Malaysia's Contextuyunaman100% (1)
- CV 4Документ2 страницыCV 4api-312667938Оценок пока нет
- Appendix F FormatДокумент4 страницыAppendix F FormatGeОценок пока нет
- How To Configure Checklists in SAP Solution Manager 7.1Документ12 страницHow To Configure Checklists in SAP Solution Manager 7.1singhashwiniОценок пока нет
- SpeedwayReaderQuickStartGuide 50484060407Документ2 страницыSpeedwayReaderQuickStartGuide 50484060407LuisОценок пока нет
- KMSC Mystery School of Self Spiritual MasteryДокумент7 страницKMSC Mystery School of Self Spiritual MasteryRalphОценок пока нет
- JjiДокумент64 страницыJjiPriyanka YaduОценок пока нет
- Esp QuestionnaireДокумент9 страницEsp QuestionnaireMarivic SolijonОценок пока нет
- Fox 7th ISM ch07-13Документ1 079 страницFox 7th ISM ch07-13Ismar GarbazzaОценок пока нет
- Intelligent Design of Industrial Steel Buildings - A BIM ApproachДокумент8 страницIntelligent Design of Industrial Steel Buildings - A BIM Approachshubham kothawadeОценок пока нет
- TitlesДокумент2 страницыTitlesJL EspirituОценок пока нет
- BRAZIL MM and SD Manual Steps To CutoverДокумент19 страницBRAZIL MM and SD Manual Steps To CutoverRafa CarrilloОценок пока нет
- RCA 1 and 2 Wafer CleanДокумент3 страницыRCA 1 and 2 Wafer CleanJoonhyuk HwangОценок пока нет
- Application LetterДокумент8 страницApplication LetterProbiotik Organik PalembangОценок пока нет
- Master Pages:: Creating A Site-Wide Layout Using Master PagesДокумент18 страницMaster Pages:: Creating A Site-Wide Layout Using Master PagesCarlos LopezОценок пока нет
- Jackson - Chimu Sculptures of Huacas Takaynamo and El DragonДокумент26 страницJackson - Chimu Sculptures of Huacas Takaynamo and El DragonguillermoОценок пока нет
- Curriculum Vitae: EducationДокумент3 страницыCurriculum Vitae: EducationdavidОценок пока нет
- KG 2 Week 5 - (133089689484163457) - 0Документ3 страницыKG 2 Week 5 - (133089689484163457) - 0Nahdat Al Ghad International SchoolОценок пока нет
- Socsc 03Документ24 страницыSocsc 03Emon Espejo100% (1)
- Ethnic Groups and RacismДокумент21 страницаEthnic Groups and RacismNichaella BiscochoОценок пока нет
- CEFR B1 Learning OutcomesДокумент13 страницCEFR B1 Learning OutcomesPhairouse Abdul Salam100% (1)
- 1 Lesson Plan in Formulating AssertionsДокумент6 страниц1 Lesson Plan in Formulating AssertionsGenelyn TimolaОценок пока нет
- Resumen CronoamperometríaДокумент3 страницыResumen Cronoamperometríabettypaz89Оценок пока нет
- 10 Heuristic Principles: by Jakob NielsenДокумент16 страниц10 Heuristic Principles: by Jakob NielsenKelum JayamannaОценок пока нет
- Developing Training Program For Effective and Quality Volleyball PlayersДокумент13 страницDeveloping Training Program For Effective and Quality Volleyball PlayersDeogracia BorresОценок пока нет
- Jigs BatacДокумент28 страницJigs BatacZab Robledo RiveraОценок пока нет
- Uci Xco Me Results XДокумент4 страницыUci Xco Me Results XSimone LanciottiОценок пока нет
- RHCSA Sa1 2 EXAM Questions (1) 1Документ23 страницыRHCSA Sa1 2 EXAM Questions (1) 1hosnitmiОценок пока нет