Вам также может понравиться
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)От EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Оценок пока нет
- Multi-Rate Digital Signal ProcessingДокумент38 страницMulti-Rate Digital Signal Processinganon_326727214Оценок пока нет
- IntroductionДокумент33 страницыIntroductioneng.rayan1996Оценок пока нет
- X (N) y (N) 1Документ4 страницыX (N) y (N) 1jamesyuОценок пока нет
- DRRGFDTGGДокумент48 страницDRRGFDTGGHassan ShehadiОценок пока нет
- Ch6 Z Transform2022Документ29 страницCh6 Z Transform2022Trần TânОценок пока нет
- Kasami and Gold SequencesДокумент21 страницаKasami and Gold Sequencesmaheshwaran50% (2)
- 2008 2009 1 (Q+S)Документ18 страниц2008 2009 1 (Q+S)marwanОценок пока нет
- Assignment 1Документ2 страницыAssignment 1Harry WillsmithОценок пока нет
- 2-LTI Discrete Time SystemsДокумент22 страницы2-LTI Discrete Time SystemsBomber KillerОценок пока нет
- Assignment 2-1Документ3 страницыAssignment 2-1opus2012Оценок пока нет
- DSP Lab 6 (Ztransform)Документ8 страницDSP Lab 6 (Ztransform)abdullah khalid100% (1)
- Quiz4 SolДокумент19 страницQuiz4 Soldjun033Оценок пока нет
- Ch3-DSP ZДокумент90 страницCh3-DSP ZtrucquynhtudoanОценок пока нет
- 2 Introduction Signals ADCDACДокумент36 страниц2 Introduction Signals ADCDACAvik sahaОценок пока нет
- Assignment 1Документ5 страницAssignment 1Ankit SmithОценок пока нет
- Tute SignalsДокумент12 страницTute SignalsNikhil KumОценок пока нет
- Buatlah Program Untuk Menyelesaikaan Computer Problems 13.2 No 3 Dan 4Документ1 страницаBuatlah Program Untuk Menyelesaikaan Computer Problems 13.2 No 3 Dan 4Dany WidiyantoОценок пока нет
- Signal Processing Important QuestionsДокумент2 страницыSignal Processing Important Questionsnaresh.kr848830100% (1)
- Solutions For Active Learning Questions: Dror Baron March 2018Документ8 страницSolutions For Active Learning Questions: Dror Baron March 2018Ashish KapoorОценок пока нет
- Solutions For Active Learning Questions: Dror Baron March 2018Документ8 страницSolutions For Active Learning Questions: Dror Baron March 2018Ashish KapoorОценок пока нет
- Filtering and ConvolutionsДокумент15 страницFiltering and ConvolutionssoumikbhОценок пока нет
- Fundamentals of Ultrasonic Phased Arrays - 311-320Документ10 страницFundamentals of Ultrasonic Phased Arrays - 311-320Kevin HuangОценок пока нет
- DSP-Chapter5 Student 19072015Документ35 страницDSP-Chapter5 Student 19072015Ngọc Minh LêОценок пока нет
- Pa190 01Документ32 страницыPa190 01OSAMAОценок пока нет
- Structured Multivariable Phase Margin Analysis With Applications To A Missile AutopilotДокумент9 страницStructured Multivariable Phase Margin Analysis With Applications To A Missile AutopilotjrbaronОценок пока нет
- 23 Power SeriesДокумент15 страниц23 Power Seriesk56jn7xzwxОценок пока нет
- Dsp2018foehu Lec03 Discrete Timesignalsandsystems 180225191344 PDFДокумент87 страницDsp2018foehu Lec03 Discrete Timesignalsandsystems 180225191344 PDFtamizh kaviОценок пока нет
- RDTH3120-b TPДокумент119 страницRDTH3120-b TP161637004742Оценок пока нет
- Lab 1Документ8 страницLab 1yohanОценок пока нет
- Chapter3 STДокумент99 страницChapter3 STHoang TranОценок пока нет
- 3 - Discrete Time Systems PDFДокумент29 страниц3 - Discrete Time Systems PDFfigob33370Оценок пока нет
- Selective Problems For PracticeДокумент5 страницSelective Problems For PracticeBethlehem AbiyОценок пока нет
- Numerical Analysis II PDFДокумент115 страницNumerical Analysis II PDFAlaa GhaziОценок пока нет
- Week 2 - Lecture NotesДокумент34 страницыWeek 2 - Lecture NotesGhozi AlbiziaОценок пока нет
- 15 Applications 15 05 2023Документ17 страниц15 Applications 15 05 2023SivaОценок пока нет
- Signal Processing Final Project Report On Multirate Signal ProcessingДокумент9 страницSignal Processing Final Project Report On Multirate Signal ProcessingDhruv HirparaОценок пока нет
- Discrete-Time System: 3.1.1 AccumulatorДокумент27 страницDiscrete-Time System: 3.1.1 AccumulatorEmmanuel Nama HasalamaОценок пока нет
- DSP List1Документ2 страницыDSP List1MIGUEL ANGEL VICENTE CANAVIRIОценок пока нет
- TVDMMДокумент14 страницTVDMMKhalandar BashaОценок пока нет
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisДокумент21 страницаDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetiserichaasОценок пока нет
- Lab4 Z TransformДокумент10 страницLab4 Z Transform215231Оценок пока нет
- Randomnumbers Chapter6Документ59 страницRandomnumbers Chapter6kate1129Оценок пока нет
- Chapter 1Документ50 страницChapter 1farouq_razzaz2574Оценок пока нет
- CH 3Документ24 страницыCH 3derresesolomon36Оценок пока нет
- DSP Lab Sheet 2 PDFДокумент50 страницDSP Lab Sheet 2 PDFSreekrishna DasОценок пока нет
- Image Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallДокумент72 страницыImage Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallBEN AMARОценок пока нет
- Xu-Ly-Tin-Hieu-So - Nguyen-Thanh-Tuan - Dsp-Chapter5 - Z-Transform - (Cuuduongthancong - Com)Документ34 страницыXu-Ly-Tin-Hieu-So - Nguyen-Thanh-Tuan - Dsp-Chapter5 - Z-Transform - (Cuuduongthancong - Com)hang.nguyen1809Оценок пока нет
- Multirate Signal Processing: I. Selesnick EL 713 Lecture NotesДокумент32 страницыMultirate Signal Processing: I. Selesnick EL 713 Lecture Notesboopathi123Оценок пока нет
- Performance Analysis of Beamforming For Mimo Radar: Progress in Electromagnetics Research, PIER 84, 123-134, 2008Документ12 страницPerformance Analysis of Beamforming For Mimo Radar: Progress in Electromagnetics Research, PIER 84, 123-134, 2008Valerie LaneОценок пока нет
- Ss Lab10Документ7 страницSs Lab10AaqibRОценок пока нет
- HT TP: //qpa Pe R.W But .Ac .In: 2011 Signals and SystemДокумент7 страницHT TP: //qpa Pe R.W But .Ac .In: 2011 Signals and SystemSoumitra BhowmickОценок пока нет
- Discrete Fourier TransformДокумент16 страницDiscrete Fourier TransformGopinathan SudheerОценок пока нет
- Digital Signal Processing Lecture Notes 2 PageДокумент5 страницDigital Signal Processing Lecture Notes 2 PageLungelo MkhwanaziОценок пока нет
- Convergence Region Questions and Answers - SanfoundryДокумент11 страницConvergence Region Questions and Answers - SanfoundrykshambelmekuyeОценок пока нет
- EEE312 Lab Sheet 3 Revised - SumДокумент8 страницEEE312 Lab Sheet 3 Revised - SumMasud SarkerОценок пока нет
- Digital Filters 1Документ6 страницDigital Filters 1Ikram E KhudaОценок пока нет
- Biosignals & Biosystems: Block 2. The Z-TransformДокумент69 страницBiosignals & Biosystems: Block 2. The Z-Transformmaria reverteОценок пока нет
- Transmission Line PricingДокумент1 страницаTransmission Line Pricingsetsindia3735Оценок пока нет
- Reactive Power Optimization in Deregulated Electricity Market Using Firefly AlgorithmДокумент1 страницаReactive Power Optimization in Deregulated Electricity Market Using Firefly Algorithmsetsindia3735Оценок пока нет
- Television Circuit Trouble Shooting With SMPS Stage FaultsДокумент1 страницаTelevision Circuit Trouble Shooting With SMPS Stage Faultssetsindia3735Оценок пока нет
- Simulation and Hardware Implementation of Single Phase Matrix Converter For Passive LoadsДокумент1 страницаSimulation and Hardware Implementation of Single Phase Matrix Converter For Passive Loadssetsindia3735Оценок пока нет
- Reactive Power Optimization in Deregulated Electricity Market Using Firefly AlgorithmДокумент1 страницаReactive Power Optimization in Deregulated Electricity Market Using Firefly Algorithmsetsindia3735Оценок пока нет
- Power Transformer Differential Protection Based On Clarke's Transformation and Fuzzy SystemsДокумент1 страницаPower Transformer Differential Protection Based On Clarke's Transformation and Fuzzy Systemssetsindia3735Оценок пока нет
- Simulation and Hardware Implementation Echo Cancellation Using The Lms AlgorithmДокумент1 страницаSimulation and Hardware Implementation Echo Cancellation Using The Lms Algorithmsetsindia3735Оценок пока нет
- Security Constrained Econoimc Dispatch Using PsoДокумент1 страницаSecurity Constrained Econoimc Dispatch Using Psosetsindia3735Оценок пока нет
- Optimal Location and Capacity of Statcom For Voltage Stablity Enchancement Using GaДокумент1 страницаOptimal Location and Capacity of Statcom For Voltage Stablity Enchancement Using Gasetsindia3735Оценок пока нет
- Optimal Location of Facts Devices For Voltage Stablity Enchancement Using GaДокумент1 страницаOptimal Location of Facts Devices For Voltage Stablity Enchancement Using Gasetsindia3735Оценок пока нет
- Power System Stability Enhancement Using UPFCДокумент1 страницаPower System Stability Enhancement Using UPFCsetsindia3735Оценок пока нет
- Power Transformer Protection Based On Clarke's Transformation and Fuzzy SystemsДокумент1 страницаPower Transformer Protection Based On Clarke's Transformation and Fuzzy Systemssetsindia3735Оценок пока нет
- Micro Controller Based Control Panel For Industrial DriveДокумент1 страницаMicro Controller Based Control Panel For Industrial Drivesetsindia3735Оценок пока нет
- Optimal Location and Capacity of Statcom For Voltage Stablity Enchancement Using GaДокумент1 страницаOptimal Location and Capacity of Statcom For Voltage Stablity Enchancement Using Gasetsindia3735Оценок пока нет
- Identification of Heffron-Phillips Parameters For Synchronous MachineДокумент1 страницаIdentification of Heffron-Phillips Parameters For Synchronous Machinesetsindia3735Оценок пока нет
- Hardware Implementation of Three Level Inverter Reduced SwitchesДокумент1 страницаHardware Implementation of Three Level Inverter Reduced Switchessetsindia3735Оценок пока нет
- Improved Fuzzy Logic Controller For Agc System After DeregulationДокумент1 страницаImproved Fuzzy Logic Controller For Agc System After Deregulationsetsindia3735Оценок пока нет
- Improving Grid Power Quality With Fuzzy Controller On Wind Energy SystemДокумент1 страницаImproving Grid Power Quality With Fuzzy Controller On Wind Energy Systemsetsindia3735Оценок пока нет
- Improving Grid Power Quality With Fuzzy Controller On Wind Energy SystemДокумент1 страницаImproving Grid Power Quality With Fuzzy Controller On Wind Energy Systemsetsindia3735Оценок пока нет
- Implementation of Overmodulation in Single Phase Cascade InverterДокумент1 страницаImplementation of Overmodulation in Single Phase Cascade Invertersetsindia3735Оценок пока нет
- Fast Transversal Recursive Least Squares Algorithm Implementation in DSP ProcessorДокумент1 страницаFast Transversal Recursive Least Squares Algorithm Implementation in DSP Processorsetsindia3735Оценок пока нет
- Hardware Implementation of A New Single-Phase Cycloconverter Based On Single-Phase Matrix Converter Topology Using Pulse Width ModulationДокумент1 страницаHardware Implementation of A New Single-Phase Cycloconverter Based On Single-Phase Matrix Converter Topology Using Pulse Width Modulationsetsindia3735Оценок пока нет
- FPGA Based Hardware Implementation of Median Filters For Image EnhancementДокумент1 страницаFPGA Based Hardware Implementation of Median Filters For Image Enhancementsetsindia3735Оценок пока нет
- Energy Management by Loss Minimization Using PSOДокумент1 страницаEnergy Management by Loss Minimization Using PSOsetsindia3735Оценок пока нет
- A New Digital Distance Relaying Scheme For StatcomДокумент1 страницаA New Digital Distance Relaying Scheme For Statcomsetsindia3735Оценок пока нет
- Firefly Algorithm For Economic DispatchДокумент1 страницаFirefly Algorithm For Economic Dispatchsetsindia3735Оценок пока нет
- Dc-Link Fuzzy Controller For PMSGДокумент1 страницаDc-Link Fuzzy Controller For PMSGsetsindia3735Оценок пока нет
- Design of Adaptive Neuro Fuzzy Controller For Load Frequency Control in Two Area SystemДокумент1 страницаDesign of Adaptive Neuro Fuzzy Controller For Load Frequency Control in Two Area Systemsetsindia3735Оценок пока нет
- Transmission Line PricingДокумент1 страницаTransmission Line Pricingsetsindia3735Оценок пока нет
- Simulation and Hardware Implementation of Single Phase Matrix Converter For Passive LoadsДокумент1 страницаSimulation and Hardware Implementation of Single Phase Matrix Converter For Passive Loadssetsindia3735Оценок пока нет
- Epson R300 R310 Service Manual CompleteДокумент108 страницEpson R300 R310 Service Manual Completeotaner42100% (1)
- Idle Mode Cell ReselectionДокумент2 страницыIdle Mode Cell ReselectionTaz NazОценок пока нет
- ZR6 Mb-E Andy 0413 Final PDFДокумент42 страницыZR6 Mb-E Andy 0413 Final PDFMihohohoОценок пока нет
- Isolation Transformer PDFДокумент3 страницыIsolation Transformer PDFdeepakОценок пока нет
- Handbook 02Документ138 страницHandbook 02joseftalerОценок пока нет
- Unit-3 Question Bank - Real World Interfacing With ARM7 Based MicrocontrollerДокумент2 страницыUnit-3 Question Bank - Real World Interfacing With ARM7 Based Microcontrollerganesh SawantОценок пока нет
- LF351 Wide Bandwidth JFET Input Operational Amplifier: Literature Number: SNOSBH2Документ14 страницLF351 Wide Bandwidth JFET Input Operational Amplifier: Literature Number: SNOSBH2elettroiceОценок пока нет
- Ina 1651Документ41 страницаIna 1651Alexandre Le GrandОценок пока нет
- Eikon E2Документ64 страницыEikon E2Jonathan GarciaОценок пока нет
- Experiment 6Документ8 страницExperiment 6pnarendrareddy.mscОценок пока нет
- Unit 2 QuizДокумент18 страницUnit 2 QuizkalpanadeviОценок пока нет
- 7720120191PL BerNationalДокумент764 страницы7720120191PL BerNationalHector Andres Peña RamirezОценок пока нет
- A Technical Seminar Report OnДокумент11 страницA Technical Seminar Report OnaravindnehaОценок пока нет
- LG Service ManualДокумент29 страницLG Service ManualAmin Aminuddin100% (2)
- Classification of Control SystemsДокумент15 страницClassification of Control SystemsMohankumar V.Оценок пока нет
- Partial List of Our Testing EquipmentДокумент1 страницаPartial List of Our Testing EquipmentSubhransu MohapatraОценок пока нет
- 11 OMO333010 BSC6900 GSM Call Drop Problem Analysis ISSUE 1.01Документ65 страниц11 OMO333010 BSC6900 GSM Call Drop Problem Analysis ISSUE 1.01Maidiana100% (1)
- C TutorialДокумент288 страницC Tutorialermenda69Оценок пока нет
- TRP 9250 (Technical Manual) PDFДокумент289 страницTRP 9250 (Technical Manual) PDFAnonymous YV9QiAОценок пока нет
- Mobile InstallationДокумент38 страницMobile Installationdot16eОценок пока нет
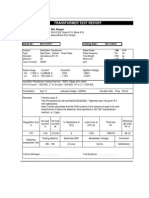
- X-Former Test Report For 100kVAДокумент3 страницыX-Former Test Report For 100kVAnisargo0% (1)
- PTC04-II EPON Access Hardware Installation Manual PDFДокумент23 страницыPTC04-II EPON Access Hardware Installation Manual PDFvmereciОценок пока нет
- Kathrein 2017 Directional Antennas VPol 690-2690 MHZДокумент8 страницKathrein 2017 Directional Antennas VPol 690-2690 MHZRobertОценок пока нет
- M100 3G Quick Start Guide User Manual v4Документ29 страницM100 3G Quick Start Guide User Manual v4Karl TagalaОценок пока нет
- Eca Labmanual MultisimДокумент57 страницEca Labmanual Multisimvinodh123Оценок пока нет
- Panasonic Th-37pv80pa Th-37px80ba Th-37px80ea Th-42pv80pa Th-42px80ba Th-42px80ea Chassis Gph11deДокумент175 страницPanasonic Th-37pv80pa Th-37px80ba Th-37px80ea Th-42pv80pa Th-42px80ba Th-42px80ea Chassis Gph11depagy snvОценок пока нет
- The Digital Representation of SoundДокумент8 страницThe Digital Representation of SoundrichietrangОценок пока нет
- Nbs Technical Note 1319Документ252 страницыNbs Technical Note 1319asarolicОценок пока нет
- Affordable High-End AudioДокумент120 страницAffordable High-End Audiozambila100% (2)
- The Network Core: - Mesh of Interconnected RoutersДокумент42 страницыThe Network Core: - Mesh of Interconnected RoutersĐào Quỳnh NhưОценок пока нет