Вам также может понравиться
- Service Catalogue TotalДокумент90 страницService Catalogue Totalиван Троянов100% (2)
- Canon 5d Mark II Parts Lists and SchematicsДокумент28 страницCanon 5d Mark II Parts Lists and SchematicsBora Ereşici100% (7)
- Cable Tray Inspection ListДокумент1 страницаCable Tray Inspection ListTreesa Archnana100% (1)
- Measurements Instrumintations 1Документ12 страницMeasurements Instrumintations 1Saeed Bajawi100% (1)
- 01 TP 101pneumatics Work Book Basic LevelДокумент200 страниц01 TP 101pneumatics Work Book Basic LevelGF MAОценок пока нет
- Stepper MotorДокумент11 страницStepper MotorPrince RajОценок пока нет
- Sensors Used in RobotДокумент92 страницыSensors Used in RobotGoutham Mareeswaran B100% (1)
- DFDДокумент9 страницDFDNandaShivaniОценок пока нет
- Solid State Physics 1st Edition Textbook Solutions - Chegg - Com2Документ7 страницSolid State Physics 1st Edition Textbook Solutions - Chegg - Com2JharoloTОценок пока нет
- Point To Point ControlДокумент19 страницPoint To Point ControlrajeshОценок пока нет
- Worksheet 5 Obstacle DetectionДокумент3 страницыWorksheet 5 Obstacle Detectionapi-239713895Оценок пока нет
- Solve 3 Simultaneous Equation Using Inverse MethodДокумент23 страницыSolve 3 Simultaneous Equation Using Inverse Methodkancil orangeОценок пока нет
- Sensor Performance Characteristics DefinitionsДокумент12 страницSensor Performance Characteristics DefinitionsKhairul FahzanОценок пока нет
- System Testing MethodologyДокумент6 страницSystem Testing Methodologydfdfd100% (1)
- Linear DC MotorДокумент13 страницLinear DC MotorrahulkudluОценок пока нет
- 8051 CH2Документ89 страниц8051 CH2Amardeep PotdarОценок пока нет
- Hvdc&Facts SyllabusДокумент2 страницыHvdc&Facts SyllabusChristopher Ortega100% (1)
- Transposition of Conductors in Power Transmission LinesДокумент2 страницыTransposition of Conductors in Power Transmission LinesEngr Imtiaz Hussain GilaniОценок пока нет
- Bangladesh PoliceДокумент17 страницBangladesh PoliceCpsMinhazulIslamОценок пока нет
- Design of High Performance Linear Brushless DC Motor With Ironless CoreДокумент6 страницDesign of High Performance Linear Brushless DC Motor With Ironless CoreShubhzsОценок пока нет
- UNIT I - SCR Triggering and CommutationДокумент14 страницUNIT I - SCR Triggering and CommutationmalathynarayaniОценок пока нет
- Unit 2 PDFДокумент170 страницUnit 2 PDFSaurabh RajОценок пока нет
- X-Y Recorder - The Web's Where You Study In!Документ3 страницыX-Y Recorder - The Web's Where You Study In!Srihari KilaruОценок пока нет
- Microcontrollers - UNIT IДокумент45 страницMicrocontrollers - UNIT IyayavaramОценок пока нет
- Nptel: High Voltage DC Transmission - Web CourseДокумент2 страницыNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- 2004-10 Linear MotorДокумент11 страниц2004-10 Linear MotorSupatmono NAIОценок пока нет
- Integrated Mobile Surveillance and Wireless Sensor SystemДокумент10 страницIntegrated Mobile Surveillance and Wireless Sensor SystemARVIND100% (1)
- Robot End EffectorДокумент25 страницRobot End EffectorRakeshSainiОценок пока нет
- SensorsДокумент43 страницыSensorsDr. Harjot Gill100% (1)
- Measurement of VelocityДокумент59 страницMeasurement of VelocityYogeshBhatt100% (1)
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverДокумент7 страницSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidОценок пока нет
- Cs Pole Placement DesignДокумент15 страницCs Pole Placement Design18U208 - ARJUN A100% (1)
- Moog Valves D633 D634 Catalog enДокумент14 страницMoog Valves D633 D634 Catalog enPritam SinghОценок пока нет
- PLC Unit 2-1 PDFДокумент44 страницыPLC Unit 2-1 PDFMahesh ShendeОценок пока нет
- Motion Sensors: BY:Abdulaziz Moosa & Peshkaft Hussein Superviced By: JawahirДокумент20 страницMotion Sensors: BY:Abdulaziz Moosa & Peshkaft Hussein Superviced By: Jawahirabdulazizmoosa93Оценок пока нет
- SERVOMOTORES OMRON g5 - Series - I815-E1 - 29 - 19 - csm2106 PDFДокумент59 страницSERVOMOTORES OMRON g5 - Series - I815-E1 - 29 - 19 - csm2106 PDFHebert Javier RengifoОценок пока нет
- Unit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorДокумент184 страницыUnit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorAgatha ChristieОценок пока нет
- Lecture 10 MEMSДокумент111 страницLecture 10 MEMSapi-27535945100% (1)
- Unit Ii: Digital ProtectionДокумент55 страницUnit Ii: Digital ProtectionViswanathanBalajiОценок пока нет
- Passivity Based ControlДокумент25 страницPassivity Based ControlRan HaoОценок пока нет
- An Introduction To Clustering MethodsДокумент8 страницAn Introduction To Clustering MethodsmagargieОценок пока нет
- Mathematical Modelling of Linear Induction MotorДокумент4 страницыMathematical Modelling of Linear Induction MotorNasser100% (1)
- Multistage Impulse GeneratorДокумент2 страницыMultistage Impulse Generatorsurekawithana75% (4)
- Bibliography: Primary Sources: 1Документ20 страницBibliography: Primary Sources: 1Bidisha SenGuptaОценок пока нет
- Valvula Proporcional Série d633 e d634Документ16 страницValvula Proporcional Série d633 e d634Lucas Vinícius CostaОценок пока нет
- 3 PH Induction Motor IntroductionДокумент37 страниц3 PH Induction Motor IntroductionNaga Raju AngajalaОценок пока нет
- Chapter 3 PG MetrologyДокумент3 страницыChapter 3 PG MetrologyramptechОценок пока нет
- Fuzzy LogicДокумент48 страницFuzzy LogicMani Bharath NutiОценок пока нет
- Control - Systems. TWO MARKSДокумент32 страницыControl - Systems. TWO MARKSdivya vaidhyanathanОценок пока нет
- Spatial Filtering TechniquesДокумент36 страницSpatial Filtering TechniquesK.R.RaguramОценок пока нет
- Measurement and InstrumentationДокумент45 страницMeasurement and Instrumentationsamkous100% (1)
- Lab - State SpaceДокумент15 страницLab - State SpaceSohaib Sajid100% (1)
- Ei1252 - Transducer EngineeringДокумент18 страницEi1252 - Transducer Engineeringguru.rjpmОценок пока нет
- Engineering Practices Laboratory: Lab ManualДокумент51 страницаEngineering Practices Laboratory: Lab ManualKarthikeyan100% (1)
- Intro To CNC and Main Parts of CNCДокумент18 страницIntro To CNC and Main Parts of CNCsank_knasОценок пока нет
- Fuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaДокумент96 страницFuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaFLOWERОценок пока нет
- Multimeter ReportДокумент15 страницMultimeter Reportapi-244226518Оценок пока нет
- Design Via Root LocusДокумент53 страницыDesign Via Root LocusAhmed ShareefОценок пока нет
- Sensor DefinitionsДокумент6 страницSensor Definitionsapi-296499245Оценок пока нет
- Types of Robot SensorsДокумент8 страницTypes of Robot Sensorsmd anik hasanОценок пока нет
- Sensor Act 1-2Документ5 страницSensor Act 1-2api-295212456Оценок пока нет
- SensorsДокумент31 страницаSensorsRameshОценок пока нет
- Basic Inro - RobotsДокумент9 страницBasic Inro - RobotsAwais khalidОценок пока нет
- Assignment SystemsДокумент2 страницыAssignment SystemsJillianne PadilloОценок пока нет
- Without Me by HalseyДокумент1 страницаWithout Me by HalseyJillianne PadilloОценок пока нет
- Trig Ratios of SpecialДокумент3 страницыTrig Ratios of SpecialJillianne PadilloОценок пока нет
- Reproductive Health Law in The PhilippinesДокумент3 страницыReproductive Health Law in The PhilippinesJillianne PadilloОценок пока нет
- Without Me by HalseyДокумент1 страницаWithout Me by HalseyJillianne PadilloОценок пока нет
- Nuclear Power PlantsДокумент4 страницыNuclear Power PlantsJillianne PadilloОценок пока нет
- Power Generation: Ring TopologyДокумент2 страницыPower Generation: Ring TopologyJillianne PadilloОценок пока нет
- Trig Ratios of SpecialДокумент3 страницыTrig Ratios of SpecialJillianne PadilloОценок пока нет
- Pressure VesselsДокумент37 страницPressure VesselsJillianne PadilloОценок пока нет
- Pressure VesselsДокумент37 страницPressure VesselsJillianne PadilloОценок пока нет
- Linear Equation: Submitted By: Angelene L. CalingasanДокумент7 страницLinear Equation: Submitted By: Angelene L. CalingasanJillianne PadilloОценок пока нет
- Enerpac EP Series CatalogДокумент4 страницыEnerpac EP Series CatalogTitanplyОценок пока нет
- Aw Get 126a 240 Installation ManualДокумент2 страницыAw Get 126a 240 Installation ManualJose Martin MotaОценок пока нет
- Diagrama Electrico C-12 (9SM)Документ2 страницыDiagrama Electrico C-12 (9SM)luis alberto100% (1)
- Cat CommutSircoVM-gbДокумент4 страницыCat CommutSircoVM-gbEko SulistyoОценок пока нет
- DPC6HG Aa00 G0000 ZS001 - 001 - 01Документ6 страницDPC6HG Aa00 G0000 ZS001 - 001 - 01rajitkumar.3005Оценок пока нет
- Doldhia Synthetic AC, Illu, TransДокумент70 страницDoldhia Synthetic AC, Illu, Transakshay mukadeОценок пока нет
- SandyДокумент1 страницаSandykarthick2601Оценок пока нет
- Idec NRPS10 1A Datasheet PDFДокумент58 страницIdec NRPS10 1A Datasheet PDFKatherine EsperillaОценок пока нет
- Appleton Sellos VerticalesДокумент2 страницыAppleton Sellos VerticalesArq. Giovanni LopezОценок пока нет
- Selection of Transmission Timing Belts 1: (Technical Data)Документ7 страницSelection of Transmission Timing Belts 1: (Technical Data)korkieОценок пока нет
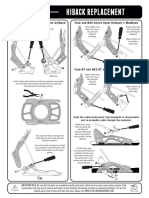
- Hiback Replacement: Flite, Micron, H and Axis-Series Uniback Fuse and Nx2-Series Asym Uniback + ModbackДокумент1 страницаHiback Replacement: Flite, Micron, H and Axis-Series Uniback Fuse and Nx2-Series Asym Uniback + ModbackLeОценок пока нет
- Westinghouse Lighting MU-250 Series Mercury Underpass Spec Sheet 3-72Документ2 страницыWestinghouse Lighting MU-250 Series Mercury Underpass Spec Sheet 3-72Alan MastersОценок пока нет
- E Ball 3 IJTRD18002Документ3 страницыE Ball 3 IJTRD18002Aakanksha HurpadeОценок пока нет
- Stock PH 1-8-2022Документ66 страницStock PH 1-8-2022ariniОценок пока нет
- AF-E-06-12 - 0 - 132kV OHL Feeder E06 - Schematic DiagramДокумент58 страницAF-E-06-12 - 0 - 132kV OHL Feeder E06 - Schematic DiagramAdetunji Babatunde TaiwoОценок пока нет
- 374D Excavator Electrical System - Attachment - AccuGrade Gen2 (Interactive) PDFДокумент12 страниц374D Excavator Electrical System - Attachment - AccuGrade Gen2 (Interactive) PDFTom SouzaОценок пока нет
- MK Wiring Accessories 1Документ14 страницMK Wiring Accessories 1dega2556Оценок пока нет
- OnePlus 5Документ1 страницаOnePlus 5MK TiwariОценок пока нет
- K-Series™ Rooftop Units: Packaged Heat PumpДокумент32 страницыK-Series™ Rooftop Units: Packaged Heat PumpMatias AcuñaОценок пока нет
- Commissioning Ground Mounted Distribution SubstationsДокумент6 страницCommissioning Ground Mounted Distribution SubstationsSergio Henrique F. CArniettoОценок пока нет
- JU Pulling ToolДокумент1 страницаJU Pulling Toolazze bouzОценок пока нет
- Fenvik, მარტი 2012Документ50 страницFenvik, მარტი 2012emediageОценок пока нет
- Milling Machine - Mill Mate (Bridge Port Style) - JOB PROCEDURДокумент5 страницMilling Machine - Mill Mate (Bridge Port Style) - JOB PROCEDURAshok SureshОценок пока нет
- Torque Converter InspectionДокумент2 страницыTorque Converter InspectionTilleya MadramootooОценок пока нет
- 01 - Organization and Element of GBAD SystemДокумент48 страниц01 - Organization and Element of GBAD SystemKritharan SuprniomОценок пока нет
- RK310-01 Atmospheric Temperature SensorДокумент2 страницыRK310-01 Atmospheric Temperature SensorJAIRO ANDRES CAMACHO GUERREROОценок пока нет