Вам также может понравиться
- B.tech 15CS328E Virtual RealityДокумент5 страницB.tech 15CS328E Virtual RealityRajalearn2 Ramlearn2Оценок пока нет
- Network Management System A Complete Guide - 2020 EditionОт EverandNetwork Management System A Complete Guide - 2020 EditionРейтинг: 5 из 5 звезд5/5 (1)
- Final Year ProjectДокумент47 страницFinal Year ProjectKodandaОценок пока нет
- Concurrent and Real-Time Programming in JavaДокумент1 030 страницConcurrent and Real-Time Programming in JavaRavi EdirisingheОценок пока нет
- MTech Final Project DocumentationДокумент73 страницыMTech Final Project DocumentationRajashekar KongariОценок пока нет
- 1995 Book PDFДокумент381 страница1995 Book PDFKrishnav KishorОценок пока нет
- Internship PresentationДокумент16 страницInternship PresentationG n MeghanaОценок пока нет
- Chapter 1 Overview of OOPДокумент154 страницыChapter 1 Overview of OOPJason RuizОценок пока нет
- Ics2307 Simulation and ModellingДокумент79 страницIcs2307 Simulation and ModellingOloo PunditОценок пока нет
- Udemy - Spring Boot E-Commerce Ultimate Course 2021-6: Download at MAXIMUM SPEED and Remove 503 ErrorДокумент4 страницыUdemy - Spring Boot E-Commerce Ultimate Course 2021-6: Download at MAXIMUM SPEED and Remove 503 ErrorRTEFG DFGJUОценок пока нет
- Object Detector For Blind PersonДокумент20 страницObject Detector For Blind PersonRabiul islamОценок пока нет
- ARM ProcessorДокумент296 страницARM ProcessorjustforbookОценок пока нет
- Android Malware Detection Using Machine LearningДокумент31 страницаAndroid Malware Detection Using Machine LearningNALLURI PREETHIОценок пока нет
- Objective Type Questions With SolutionsДокумент11 страницObjective Type Questions With SolutionsPallavi BhartiОценок пока нет
- ACCV 2018 Tutorial: Bringing Deep Learning To The Edge With Intel® OpenVINO™Документ5 страницACCV 2018 Tutorial: Bringing Deep Learning To The Edge With Intel® OpenVINO™Halidiki SAPAОценок пока нет
- East West Institute of Technology: An Improved Approach For Fire Detection Using Deep Learning ModelsДокумент21 страницаEast West Institute of Technology: An Improved Approach For Fire Detection Using Deep Learning ModelsDeepuОценок пока нет
- Computer Graphics Viva LabДокумент4 страницыComputer Graphics Viva LabajmalОценок пока нет
- The International Journal of Computer Game Development and Education (CGDEIJ)Документ1 страницаThe International Journal of Computer Game Development and Education (CGDEIJ)Anonymous wswGZWOApОценок пока нет
- Android Chat Application Documentation PDFДокумент49 страницAndroid Chat Application Documentation PDFArsalan rexОценок пока нет
- "Accident Detection and Alert System": Visvesvaraya Technological University "Jnana Sangama" Belagavi-590018Документ23 страницы"Accident Detection and Alert System": Visvesvaraya Technological University "Jnana Sangama" Belagavi-590018Trupti PattankudiОценок пока нет
- Computer GraphicsДокумент22 страницыComputer GraphicsJyuОценок пока нет
- Whitepaper Deep LearningДокумент10 страницWhitepaper Deep Learning超揚林Оценок пока нет
- CNS Lab ManualДокумент50 страницCNS Lab Manualsowmiya d dhanasekaranОценок пока нет
- IOT-UNIT-3 MaterialДокумент19 страницIOT-UNIT-3 Materialkavists20100% (1)
- Computer Game Development and Education: An International Journal (CGDEIJ)Документ1 страницаComputer Game Development and Education: An International Journal (CGDEIJ)Anonymous wswGZWOApОценок пока нет
- Call For Book Chapters: DEEP LEARNING FOR IMAGE PROCESSING APPLICATIONSДокумент2 страницыCall For Book Chapters: DEEP LEARNING FOR IMAGE PROCESSING APPLICATIONSVania V. EstrelaОценок пока нет
- Regulation 2019 (Amendments) Common To All B.E. / B.Tech. Degree Programmes (Choice Based Credit System)Документ191 страницаRegulation 2019 (Amendments) Common To All B.E. / B.Tech. Degree Programmes (Choice Based Credit System)Mohammed MustafaОценок пока нет
- Recent Trends or Advances in Embedded Systems From KVKK PrasadДокумент10 страницRecent Trends or Advances in Embedded Systems From KVKK PrasadRamakrishnan RagavОценок пока нет
- Simple Hacks - RoboSapien V2 - RoboGuideДокумент7 страницSimple Hacks - RoboSapien V2 - RoboGuideRICHARDОценок пока нет
- Traffic Sign Board Recognition and Voice Alert System Using Convolutional Neural NetworkДокумент1 страницаTraffic Sign Board Recognition and Voice Alert System Using Convolutional Neural NetworkWebsoft Tech-HydОценок пока нет
- Digital Signal Processing - R. BabuДокумент148 страницDigital Signal Processing - R. BabuSwapnil GulhaneОценок пока нет
- 6.unit I 2 MarksДокумент3 страницы6.unit I 2 MarksprasanthprpОценок пока нет
- Sameer - Face Recognition Using PythonДокумент37 страницSameer - Face Recognition Using Pythonrajat maheshwariОценок пока нет
- B.Tech Project Mid Term Report: Handwritten Digits Recognition Using Neural NetworksДокумент13 страницB.Tech Project Mid Term Report: Handwritten Digits Recognition Using Neural NetworksVandhana RathodОценок пока нет
- Mapping Dataflow Into ArchitectureДокумент12 страницMapping Dataflow Into ArchitectureVijaya AlukapellyОценок пока нет
- TFM BECERRA RODRIGUEZ CARLOS A PDFДокумент138 страницTFM BECERRA RODRIGUEZ CARLOS A PDFMary Grace TerrazolaОценок пока нет
- Design Analog Clock Using Computer Graphic and Turbo C++ CompilerДокумент20 страницDesign Analog Clock Using Computer Graphic and Turbo C++ Compiler29Vaishnavi KadamОценок пока нет
- Computer Graphics Programming IДокумент9 страницComputer Graphics Programming IvedantkabraОценок пока нет
- AssignmentДокумент3 страницыAssignmentdurga prasadОценок пока нет
- Course Syllabus of Digital Image Processing (EE6131)Документ1 страницаCourse Syllabus of Digital Image Processing (EE6131)Ritunjay GuptaОценок пока нет
- Image Caption Generator Using Deep Learning: Guided by Dr. Ch. Bindu Madhuri, M Tech, PH.DДокумент9 страницImage Caption Generator Using Deep Learning: Guided by Dr. Ch. Bindu Madhuri, M Tech, PH.Dsuryavamsi kakaraОценок пока нет
- 2 Convolutional Neural Network For Image ClassificationДокумент6 страниц2 Convolutional Neural Network For Image ClassificationKompruch BenjaputharakОценок пока нет
- Mohini Akhare Thesis 2019Документ88 страницMohini Akhare Thesis 2019mohini akhareОценок пока нет
- PO-CO MAPPING FOR TOM - 5th SEMДокумент3 страницыPO-CO MAPPING FOR TOM - 5th SEMGaurang JoshiОценок пока нет
- Accident Detection System: Bachelor of Science (Information Technology)Документ31 страницаAccident Detection System: Bachelor of Science (Information Technology)vivekОценок пока нет
- Top 50 MCA Colleges in India - With PackagesДокумент1 страницаTop 50 MCA Colleges in India - With PackagesJitender BadoniОценок пока нет
- Software Process & Project Management (R17a0539)Документ115 страницSoftware Process & Project Management (R17a0539)ryanОценок пока нет
- Real Time Bangladeshi License Plate Detection & Recognition: Submitted byДокумент25 страницReal Time Bangladeshi License Plate Detection & Recognition: Submitted byHomaira AlamОценок пока нет
- Robotics Chapter 5 - Robot VisionДокумент7 страницRobotics Chapter 5 - Robot Visiontutorfelix777Оценок пока нет
- Augmented Reality and Mixed RealityДокумент44 страницыAugmented Reality and Mixed RealityDevesh KankariyaОценок пока нет
- Operating Systems Lab ManualДокумент59 страницOperating Systems Lab Manualvicky krrОценок пока нет
- Mini Project: Helmet Detection and License Plate Number RecognitionДокумент14 страницMini Project: Helmet Detection and License Plate Number RecognitionS m Datacare100% (1)
- LAB (CSE 610) : Advance Computer ArchitectureДокумент21 страницаLAB (CSE 610) : Advance Computer ArchitectureNeha Kapoor100% (1)
- OCR Project Report PDFДокумент24 страницыOCR Project Report PDFvirali shahОценок пока нет
- Structured Programming EverlyneДокумент227 страницStructured Programming EverlyneEverlyne GatiОценок пока нет
- Space Invaders Design DocumentДокумент43 страницыSpace Invaders Design DocumentNiharika GuptaОценок пока нет
- Research ArticleДокумент13 страницResearch ArticleChinaski BukowskiОценок пока нет
- AMS User ManualДокумент20 страницAMS User ManualAndújar Báez CésarОценок пока нет
- BPAG 172 Solved AssignmentДокумент6 страницBPAG 172 Solved AssignmentDivyansh BajpaiОценок пока нет
- Thesis On Electrical Energy AuditДокумент8 страницThesis On Electrical Energy Auditjanetrobinsonjackson100% (2)
- Pengaruh Kemudahan Transaksi Non-Tunai Terhadap Sikap Konsumtif Masyarakat Kota MakassarДокумент12 страницPengaruh Kemudahan Transaksi Non-Tunai Terhadap Sikap Konsumtif Masyarakat Kota MakassarPutri NurhoeriyahОценок пока нет
- TEMPCORE® Process To Produce Low-Cost High Strength RebarsДокумент7 страницTEMPCORE® Process To Produce Low-Cost High Strength Rebarsamber sareenОценок пока нет
- Item StockДокумент50 страницItem StockRizki AmrullahОценок пока нет
- For Refeence Only: Bell 412ep With BLR Fastfin™ SystemДокумент3 страницыFor Refeence Only: Bell 412ep With BLR Fastfin™ SystemHerlambang Surya100% (1)
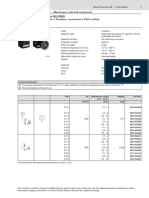
- Pressure Regulator, Series NL2-RGSДокумент3 страницыPressure Regulator, Series NL2-RGSHuynh Duc TriОценок пока нет
- AFO Mains CoursesДокумент18 страницAFO Mains CoursesVishnuОценок пока нет
- Mr. Vinayak Hanchate - CV BIM PDFДокумент3 страницыMr. Vinayak Hanchate - CV BIM PDFYassem MalikОценок пока нет
- User's Guide: Magnetic Inductive Flow Meter MAG-VIEW™Документ20 страницUser's Guide: Magnetic Inductive Flow Meter MAG-VIEW™mrdadeОценок пока нет
- Tip: Security by Subledger ApplicationДокумент5 страницTip: Security by Subledger ApplicationAnushree ChitranshuОценок пока нет
- Realtek Wi-Fi SDK For Android KK 4 4Документ15 страницRealtek Wi-Fi SDK For Android KK 4 4recruitment actОценок пока нет
- Unit 5 Vocabulary Basic 1 Match 1-10 With A-J To Make Innovations and InventionsДокумент6 страницUnit 5 Vocabulary Basic 1 Match 1-10 With A-J To Make Innovations and InventionsCristina Garcia50% (2)
- 3932-Article Text-21872-2-10-20211223Документ19 страниц3932-Article Text-21872-2-10-20211223papungОценок пока нет
- Differences Between EXCEL, SHEETS, OpenOffice CALC, & Calc de LibreOfficeДокумент5 страницDifferences Between EXCEL, SHEETS, OpenOffice CALC, & Calc de LibreOfficeCarmen RIAÑO LARBURUОценок пока нет
- Asme BPVC III D 1 NF 2015Документ226 страницAsme BPVC III D 1 NF 2015Tino OrtizОценок пока нет
- Api 650Документ12 страницApi 650Efrain TiradoОценок пока нет
- ISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Документ100 страницISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Cycy Hm100% (1)
- Real Life Startup Pitch DeckДокумент55 страницReal Life Startup Pitch DeckWalter TenecotaОценок пока нет
- Bard - Site Rite - Ultrasound-EnДокумент42 страницыBard - Site Rite - Ultrasound-EnVicОценок пока нет
- DIP167 Engineering Graphics Marathi Diploma 284Документ284 страницыDIP167 Engineering Graphics Marathi Diploma 284CIVIL ENGINEERINGОценок пока нет
- 61 PN16 PN10Документ1 страница61 PN16 PN10Vishant AsolkarОценок пока нет
- JCB 550-80 & 560-80 Brochure - Set96414422 PDFДокумент20 страницJCB 550-80 & 560-80 Brochure - Set96414422 PDFYutub RichardxdОценок пока нет
- 1-571 Study Guide - 1000+ QAДокумент112 страниц1-571 Study Guide - 1000+ QAMahmoud Hagag100% (3)
- MX4000/6000 Dual: 4550 193 80281 Revision AДокумент31 страницаMX4000/6000 Dual: 4550 193 80281 Revision AMarco MantovaniОценок пока нет
- Phy212 CH14 Worksheet-W07-KeyДокумент5 страницPhy212 CH14 Worksheet-W07-Keyangelyn tiongcoОценок пока нет
- EASA AC Redesign Manual V.0214-0815 PDFДокумент140 страницEASA AC Redesign Manual V.0214-0815 PDFDon FreemanОценок пока нет
- STQAДокумент54 страницыSTQADisha BhardwajОценок пока нет
- SIA Scope of Service Matrix-20180814-For WebsiteДокумент2 страницыSIA Scope of Service Matrix-20180814-For Websitesteven ZhaoОценок пока нет