Вам также может понравиться
- Unit 25 Sound Recording Lab LacДокумент16 страницUnit 25 Sound Recording Lab Lacapi-471521676Оценок пока нет
- 6th Year Chemistry The Gas LawsДокумент31 страница6th Year Chemistry The Gas LawsAnusia ThevendaranОценок пока нет
- LT-1 (Laplace Transform)Документ18 страницLT-1 (Laplace Transform)Kola KeerthanaОценок пока нет
- MATHII Week 2 Notes Sept 17Документ5 страницMATHII Week 2 Notes Sept 17DavidОценок пока нет
- تحليلات 1 2 3Документ27 страницتحليلات 1 2 3توحد الأديانОценок пока нет
- Laplace Transform: Presentation: He YangДокумент14 страницLaplace Transform: Presentation: He YangsaadkhalisОценок пока нет
- Periodic function: A function f (t) is said to be periodic with the period T if f (t+T) =f (t) - Example: sint and cost are periodic with period 2πДокумент14 страницPeriodic function: A function f (t) is said to be periodic with the period T if f (t+T) =f (t) - Example: sint and cost are periodic with period 2πSanthosh SrinivasanОценок пока нет
- Chapter 4 (Laplace 17)Документ33 страницыChapter 4 (Laplace 17)ibrahim muhammad yusufОценок пока нет
- Laplace Table SSCE1793Документ1 страницаLaplace Table SSCE1793super junlinОценок пока нет
- Laplace Transform (Updated 2018)Документ29 страницLaplace Transform (Updated 2018)Mohamad DuhokiОценок пока нет
- Math4 170513085146Документ47 страницMath4 170513085146jucar fernandezОценок пока нет
- Midterm Study ProblemДокумент4 страницыMidterm Study ProblemTehe SaglamОценок пока нет
- Laplace MatlabДокумент21 страницаLaplace MatlabIrwan WahyudiОценок пока нет
- Chapter 7Документ75 страницChapter 7narains81Оценок пока нет
- Ee602 LaplaceДокумент76 страницEe602 LaplaceRadhi MusaОценок пока нет
- Introduction 2Документ32 страницыIntroduction 2pham tamОценок пока нет
- Formulas LaplaceДокумент1 страницаFormulas LaplaceIvo GeceleОценок пока нет
- Attachment Laplace TransformДокумент2 страницыAttachment Laplace Transformahmad hazimОценок пока нет
- 02 Chapter 02Документ60 страниц02 Chapter 02Get CubeloОценок пока нет
- Laplace TransformsДокумент20 страницLaplace TransformsQazi ShaikhОценок пока нет
- Ch15 - Laplace Transforms IДокумент45 страницCh15 - Laplace Transforms IdadsdОценок пока нет
- Laplace TransformДокумент37 страницLaplace TransformAMIE Study Circle, RoorkeeОценок пока нет
- The Unit Step Function at A ( 0) Is Defined As: Ta Uta T AДокумент14 страницThe Unit Step Function at A ( 0) Is Defined As: Ta Uta T AAditya KrishnaОценок пока нет
- LaplaceДокумент22 страницыLaplaceKomal SinghОценок пока нет
- T T T T T F: 4.0 Laplace TransformationДокумент4 страницыT T T T T F: 4.0 Laplace TransformationSiti Munirah Binti ZainudinОценок пока нет
- Control SystemДокумент45 страницControl SystemKelvin KongОценок пока нет
- Tutorial 1Документ16 страницTutorial 1Sai AnoopОценок пока нет
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionДокумент25 страницL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneОценок пока нет
- Introduction To Laplace TransformsДокумент32 страницыIntroduction To Laplace TransformsAd Man GeTigОценок пока нет
- WINSEM2022-23 BMAT102L TH VL2022230500398 2023-04-05 Reference-Material-IДокумент14 страницWINSEM2022-23 BMAT102L TH VL2022230500398 2023-04-05 Reference-Material-Iabhimanyu.yadav2022Оценок пока нет
- Lecture 2: Laplace TransformДокумент58 страницLecture 2: Laplace TransformheroОценок пока нет
- Sheet 1 Laplace Transform 20190914Документ3 страницыSheet 1 Laplace Transform 20190914midotaher765Оценок пока нет
- Chapter (1) Laplace TransformДокумент28 страницChapter (1) Laplace TransformMohammed NabilОценок пока нет
- Laplace TransformationДокумент48 страницLaplace TransformationGail Nathalie LiraОценок пока нет
- LaplaceДокумент23 страницыLaplaceVijay UrkudeОценок пока нет
- Formula SheetДокумент4 страницыFormula Sheetgeyoxi5098Оценок пока нет
- Laplace Transforms and Its Applications: Unit-IiiДокумент68 страницLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanОценок пока нет
- Laplace FormulaДокумент16 страницLaplace Formulashubh.fincherОценок пока нет
- Modeling in Time DomainДокумент30 страницModeling in Time Domainfarouq_razzaz2574Оценок пока нет
- Laplace Transform 1Документ5 страницLaplace Transform 1ifiokОценок пока нет
- CommunicationsДокумент44 страницыCommunicationsSaikrishnaОценок пока нет
- Lesson #2 Lecture #1 Review of Laplace TransformДокумент16 страницLesson #2 Lecture #1 Review of Laplace TransformShazidОценок пока нет
- Chapter 2 - Part 5Документ6 страницChapter 2 - Part 5Thevhan MurallyОценок пока нет
- Presentation On Laplace TransformsДокумент36 страницPresentation On Laplace TransformsRahul SinghОценок пока нет
- Chapter 3 (Laplace Transform)Документ14 страницChapter 3 (Laplace Transform)EmmanuelОценок пока нет
- Lec 1Документ23 страницыLec 1Abdulrahman AtefОценок пока нет
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Документ18 страницECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Eduardo FerreiraОценок пока нет
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformДокумент30 страницLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainОценок пока нет
- Mathematical Models of Control SystemsДокумент37 страницMathematical Models of Control SystemsmorilloatilioОценок пока нет
- TablaДокумент2 страницыTablanestorGОценок пока нет
- Tablica Laplasovih TransformacijaДокумент1 страницаTablica Laplasovih TransformacijaHexeresОценок пока нет
- Module 2 Laplace TransformДокумент13 страницModule 2 Laplace TransformJohnnette AggabaoОценок пока нет
- Laplace Transformation: 1. Basic NotionsДокумент5 страницLaplace Transformation: 1. Basic NotionsCharlie BondОценок пока нет
- Wa0003.Документ10 страницWa0003.Dhwangjwok JosephОценок пока нет
- Laplace TransformДокумент95 страницLaplace Transformkac2872Оценок пока нет
- Second Order Differential Equation: Laplace Transform - Inverse Laplace TransformДокумент8 страницSecond Order Differential Equation: Laplace Transform - Inverse Laplace TransformThevhan MurallyОценок пока нет
- Unit Iii Laplace TransformДокумент86 страницUnit Iii Laplace TransformArihant DebnathОценок пока нет
- Chapter56 Laplace&TFДокумент106 страницChapter56 Laplace&TFfebri setyawanОценок пока нет
- Elzaki Transform For Two Tank Mixing Problems PDFДокумент15 страницElzaki Transform For Two Tank Mixing Problems PDFMarvin LabajoОценок пока нет
- 2 Deterministic Signal AnalysisДокумент27 страниц2 Deterministic Signal Analysistesfalem seyoumОценок пока нет
- Laplace Transforms: Spsu Mathematics DepartmentДокумент37 страницLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiОценок пока нет
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesОт EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesОценок пока нет
- An Intelligent Fuzzy Sliding Mode Controller For A BLDC MotorДокумент5 страницAn Intelligent Fuzzy Sliding Mode Controller For A BLDC Motorvasu_koneti5124Оценок пока нет
- 2 - 1 - A - CE:Basic Electrical and Electronics Engineering:Mid MarksДокумент2 страницы2 - 1 - A - CE:Basic Electrical and Electronics Engineering:Mid Marksvasu_koneti5124Оценок пока нет
- List Funding Agencies: Contact Address: Department of Science & TechnologyДокумент18 страницList Funding Agencies: Contact Address: Department of Science & Technologyvasu_koneti5124Оценок пока нет
- Digital Storage OscilloscopeДокумент17 страницDigital Storage Oscilloscopevasu_koneti5124Оценок пока нет
- Control and Interfacing of BLDC Motor With Labview Using MyrioДокумент5 страницControl and Interfacing of BLDC Motor With Labview Using Myriovasu_koneti5124Оценок пока нет
- CasteeДокумент1 страницаCasteevasu_koneti5124Оценок пока нет
- Research Centers PDFДокумент1 страницаResearch Centers PDFvasu_koneti5124Оценок пока нет
- Slip 01Документ2 страницыSlip 01vasu_koneti5124Оценок пока нет
- TrailДокумент1 страницаTrailvasu_koneti5124Оценок пока нет
- Manuscript Template: Full Title Must Be in Sentence CaseДокумент5 страницManuscript Template: Full Title Must Be in Sentence Casevasu_koneti5124Оценок пока нет
- Kakinada Tirupathi 2015-11-27: From TO Date of JourneyДокумент2 страницыKakinada Tirupathi 2015-11-27: From TO Date of Journeyvasu_koneti5124Оценок пока нет
- Research Centers: Research Labs Sanctioned by SVETДокумент1 страницаResearch Centers: Research Labs Sanctioned by SVETvasu_koneti5124Оценок пока нет
- BEEE Assignment 1 Ece CДокумент6 страницBEEE Assignment 1 Ece Cvasu_koneti5124100% (1)
- Electrical Machine Practical's: Madanapalle Institute of Technology & Science, Madanapalle (Ugc-Autonomous)Документ1 страницаElectrical Machine Practical's: Madanapalle Institute of Technology & Science, Madanapalle (Ugc-Autonomous)vasu_koneti5124Оценок пока нет
- Fourier Series, Fourier Integral, Fourier TransformДокумент29 страницFourier Series, Fourier Integral, Fourier Transformvasu_koneti5124Оценок пока нет
- Stat e Board of Technical Education and TrainingДокумент4 страницыStat e Board of Technical Education and Trainingvasu_koneti5124Оценок пока нет
- Department of EEEДокумент6 страницDepartment of EEEvasu_koneti5124Оценок пока нет
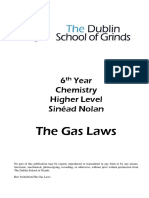
- Calculate The Load Current Across, Load Voltage Across, and Power Consumed by The Load For The Circuit in The Given FigureДокумент1 страницаCalculate The Load Current Across, Load Voltage Across, and Power Consumed by The Load For The Circuit in The Given Figurevasu_koneti5124Оценок пока нет
- Madanapalle Institute of Technology & Science, Madanapalle (Autonomous)Документ1 страницаMadanapalle Institute of Technology & Science, Madanapalle (Autonomous)vasu_koneti5124Оценок пока нет
- New Microsoft Word DocumentДокумент8 страницNew Microsoft Word Documentvasu_koneti5124Оценок пока нет
- 1 Contents of Course File-Format1Документ1 страница1 Contents of Course File-Format1vasu_koneti5124Оценок пока нет
- Pharmaceutical Emulsions by Haroon RahimДокумент49 страницPharmaceutical Emulsions by Haroon RahimHaroon Rahim67% (3)
- CSEC Mathematics - EvaluationДокумент5 страницCSEC Mathematics - EvaluationAnthony BensonОценок пока нет
- The Maurer-Cartan EquationДокумент2 страницыThe Maurer-Cartan EquationJohn BirdОценок пока нет
- Test BanksДокумент21 страницаTest Banksalex_flutistОценок пока нет
- Loading To Box CulvertsДокумент20 страницLoading To Box CulvertsPaddie MwangiОценок пока нет
- HEPA FiltersДокумент26 страницHEPA Filterssiruslara6491100% (1)
- Numerical Prediction of Concrete Slab Response To Blast LoadingДокумент15 страницNumerical Prediction of Concrete Slab Response To Blast LoadingOmer PolatОценок пока нет
- JgyugufДокумент47 страницJgyugufMarcoОценок пока нет
- Use GIMP To Add Realistic Falling Snow To A PhotoДокумент8 страницUse GIMP To Add Realistic Falling Snow To A PhotoxmathОценок пока нет
- Thin Walled Pressure Vessels: ASEN 3112 - StructuresДокумент11 страницThin Walled Pressure Vessels: ASEN 3112 - Structuresaap1Оценок пока нет
- THIRD PERIODICAL TEST SCIENCE 7 - Google FormsДокумент20 страницTHIRD PERIODICAL TEST SCIENCE 7 - Google FormsWalter OrpillaОценок пока нет
- State Space Model Nptel ModДокумент30 страницState Space Model Nptel ModBarathОценок пока нет
- LEKX6306 Torque CurvesДокумент11 страницLEKX6306 Torque Curvesmijael1393100% (1)
- K FactorДокумент3 страницыK FactorAnonymous hISvHbfiB1Оценок пока нет
- Lab Week 4 Ecw 341 Determination of Hydraulic Parameters in UniformДокумент6 страницLab Week 4 Ecw 341 Determination of Hydraulic Parameters in UniformMuhammad IrfanОценок пока нет
- Physics - Lab ReportДокумент26 страницPhysics - Lab ReportBAUAN Al DominicОценок пока нет
- The Riemann-Stieltjes Integral and Some PDFДокумент49 страницThe Riemann-Stieltjes Integral and Some PDFAlexis Garcia DuranОценок пока нет
- Mechanical Engineering - Final PDFДокумент248 страницMechanical Engineering - Final PDFRubal SharmaОценок пока нет
- Image Enhancement in The Spatial DomainДокумент10 страницImage Enhancement in The Spatial DomainFahim ShaikОценок пока нет
- Homework 4 SolДокумент6 страницHomework 4 SoljanroxaОценок пока нет
- Heinemann Practice Exam 1 Unit 3 & 4 PDFДокумент15 страницHeinemann Practice Exam 1 Unit 3 & 4 PDFBrian JonesОценок пока нет
- 120:360 - Biochemistry Fall 2015 Sample Questions For Exam 1Документ5 страниц120:360 - Biochemistry Fall 2015 Sample Questions For Exam 1BluedevОценок пока нет
- ATOMEX Europe 2011: Sigma Group A.SДокумент35 страницATOMEX Europe 2011: Sigma Group A.StomognОценок пока нет
- Example 18: Pile and Hammer Gravity Changes: GRLWEAP Standard ExamplesДокумент3 страницыExample 18: Pile and Hammer Gravity Changes: GRLWEAP Standard ExamplesbozarromegustaОценок пока нет
- IDP Math-103 Integ-Calc Oliver 2s-22-23Документ3 страницыIDP Math-103 Integ-Calc Oliver 2s-22-23YanieОценок пока нет
- 12V - 230V 50Hz Square Wave Inverter With 555Документ2 страницы12V - 230V 50Hz Square Wave Inverter With 555Abubakar SidikОценок пока нет
- Jovian Atmosphere Case Study WriteupДокумент7 страницJovian Atmosphere Case Study Writeupapi-480372762Оценок пока нет
- Astm D6927 22Документ7 страницAstm D6927 22Okello StevenОценок пока нет