Вам также может понравиться
- Second-Order Differential Equations: A Second-Order Differential Equation Is Called Linear If It Can Be WrittenДокумент33 страницыSecond-Order Differential Equations: A Second-Order Differential Equation Is Called Linear If It Can Be WrittenAaron MuellerОценок пока нет
- Numerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970От EverandNumerical Solution of Partial Differential Equations—II, Synspade 1970: Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations, SYNSPADE 1970, Held at the University of Maryland, College Park, Maryland, May 11-15, 1970Bert HubbardОценок пока нет
- Functions of Bounded VariationДокумент30 страницFunctions of Bounded VariationSee Keong Lee100% (1)
- Introduction to the Theory of Linear Partial Differential EquationsОт EverandIntroduction to the Theory of Linear Partial Differential EquationsОценок пока нет
- WEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsДокумент19 страницWEEK 7 3 5 Variation of Parameters To Find A Particular Solution 3 6 Cauchy Euler Differential EquationsMaryem ZubairОценок пока нет
- Dynamical Systems Method for Solving Nonlinear Operator EquationsОт EverandDynamical Systems Method for Solving Nonlinear Operator EquationsРейтинг: 5 из 5 звезд5/5 (1)
- Solving Partial Differential Equations (PDEsДокумент8 страницSolving Partial Differential Equations (PDEssgw67Оценок пока нет
- Nonlinear Dynamic in Engineering by Akbari-Ganji’S MethodОт EverandNonlinear Dynamic in Engineering by Akbari-Ganji’S MethodОценок пока нет
- Partial Differential EquationsДокумент45 страницPartial Differential EquationssafaatОценок пока нет
- Variation of Parameters Method For Higher-Order Equations: Dy D y Dy A A A Ay DX DX DXДокумент18 страницVariation of Parameters Method For Higher-Order Equations: Dy D y Dy A A A Ay DX DX DXAnisha RanaОценок пока нет
- Laurent Series ProblemДокумент6 страницLaurent Series ProblemOdofin GbengaОценок пока нет
- Ode PDFДокумент81 страницаOde PDFHindi Hindi100% (1)
- PDE Second Order 1Документ7 страницPDE Second Order 1Amritansh RanjanОценок пока нет
- Partial Differential EquationsДокумент18 страницPartial Differential EquationsRohit Kalsi100% (1)
- Unit 1 Tpde & Pde Lecture Notes PDFДокумент36 страницUnit 1 Tpde & Pde Lecture Notes PDFpoojaabanindranОценок пока нет
- GEC220 Note Functions of Several Variables PDFДокумент47 страницGEC220 Note Functions of Several Variables PDFAbiola AjayiОценок пока нет
- Unit I Partial Differential EquationsДокумент168 страницUnit I Partial Differential EquationsRenish AntoОценок пока нет
- 1.1 Definitions and TerminologyДокумент9 страниц1.1 Definitions and TerminologyIzzati KamalОценок пока нет
- First order differential equations of higher degreeДокумент13 страницFirst order differential equations of higher degreetasmia hamid zim100% (1)
- Partial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Документ128 страницPartial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Franklin feelОценок пока нет
- Solved ProblemsДокумент7 страницSolved ProblemsIrving JoséОценок пока нет
- Method of Undetermined Coefficients, Variation of Parameters, SuperpositionДокумент16 страницMethod of Undetermined Coefficients, Variation of Parameters, SuperpositionKhyzer HayyatОценок пока нет
- Partial Diffrential Equations First OrderДокумент7 страницPartial Diffrential Equations First Orderap021Оценок пока нет
- Finite Abelian GroupsДокумент6 страницFinite Abelian GroupsdancavallaroОценок пока нет
- Charpits Method PDFДокумент7 страницCharpits Method PDFRajeev Kumar JohariОценок пока нет
- Lecture Notes On Differential EquationsДокумент51 страницаLecture Notes On Differential EquationsSachin AryanОценок пока нет
- Sample ProblemsДокумент166 страницSample ProblemsCeejhay PanganibanОценок пока нет
- Lecture of Vector NormsДокумент16 страницLecture of Vector NormsEnes ŞavlıОценок пока нет
- The Finite Element Method For 2D Problems: Theorem 9.1Документ47 страницThe Finite Element Method For 2D Problems: Theorem 9.1Anita RahmawatiОценок пока нет
- Math Lab 2 - Tangent Planes and LinesДокумент16 страницMath Lab 2 - Tangent Planes and LinesFerdinand Sebastian Barnabas100% (1)
- Analysis of Algorithms Problems and SolutionsДокумент94 страницыAnalysis of Algorithms Problems and Solutionsbrownie89Оценок пока нет
- DifferentialДокумент15 страницDifferentialSavita KaswanОценок пока нет
- Optimization Class Notes MTH-9842Документ25 страницOptimization Class Notes MTH-9842felix.apfaltrer7766Оценок пока нет
- Solution - Partial Differential Equations - McowenДокумент59 страницSolution - Partial Differential Equations - McowenAnuj YadavОценок пока нет
- PARTIAL DIFFERENTIAL EQUATIONS (PDEДокумент7 страницPARTIAL DIFFERENTIAL EQUATIONS (PDECharyОценок пока нет
- Finite Difference and Interpolation PDFДокумент29 страницFinite Difference and Interpolation PDFanupamОценок пока нет
- Duhamel PrincipleДокумент2 страницыDuhamel PrincipleArshpreet SinghОценок пока нет
- Power Series Math 55Документ22 страницыPower Series Math 55JohnОценок пока нет
- The Bernoulli EquationДокумент4 страницыThe Bernoulli Equationdether acopiadoОценок пока нет
- Thebernoulli EquationДокумент13 страницThebernoulli EquationWASEEM_AKHTERОценок пока нет
- Linear Algebra II (Lecture Notes) - Peter PhilipДокумент213 страницLinear Algebra II (Lecture Notes) - Peter Philipvic1234059Оценок пока нет
- PDE Solutions GuideДокумент12 страницPDE Solutions GuideAnonymous E4Rbo2s0% (1)
- Solving Non-Homogeneous Linear D.E.sДокумент3 страницыSolving Non-Homogeneous Linear D.E.sPawee RamasОценок пока нет
- NUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSДокумент32 страницыNUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSmitch_g_101Оценок пока нет
- hw10 (Do Carmo p.260 Q1 - Sol) PDFДокумент2 страницыhw10 (Do Carmo p.260 Q1 - Sol) PDFjulianli0220Оценок пока нет
- Ordinary Differential Equations OdesДокумент25 страницOrdinary Differential Equations OdesDeepshikhaSinghОценок пока нет
- Classification of Differential Equations - July 22-26, 2021Документ11 страницClassification of Differential Equations - July 22-26, 2021John Tobe CarbungcoОценок пока нет
- ODE Maths document with student enrollment detailsДокумент17 страницODE Maths document with student enrollment detailsBhagirath sinh ZalaОценок пока нет
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsДокумент11 страницNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalОценок пока нет
- Ordinary Differential Equations and Fourier Series SolutionsДокумент518 страницOrdinary Differential Equations and Fourier Series SolutionsSabri AlkhaliliОценок пока нет
- Intermediate Thermodynamics Fugacity: DefinitionsДокумент19 страницIntermediate Thermodynamics Fugacity: DefinitionsMukund KsОценок пока нет
- Analytic Functions ExplainedДокумент162 страницыAnalytic Functions Explainedkannika100% (2)
- Pde CaracteristicasДокумент26 страницPde CaracteristicasAnonymous Vd26Pzpx80Оценок пока нет
- Heat Equation Solution Using Fourier TransformДокумент2 страницыHeat Equation Solution Using Fourier TransformRakesh KamathОценок пока нет
- Instructors Solutions ManualДокумент1 010 страницInstructors Solutions ManualTamara Knox100% (1)
- Solutions To Assignment 4Документ11 страницSolutions To Assignment 4Sandeep SajuОценок пока нет
- Topic 3 - Homogeneous DEДокумент15 страницTopic 3 - Homogeneous DESelaras KyleОценок пока нет
- Radius of CurvatureДокумент15 страницRadius of CurvatureLakshayОценок пока нет
- Differential Equation: Not To Be Confused WithДокумент11 страницDifferential Equation: Not To Be Confused WithDeenОценок пока нет
- Mechanics of Materials Laboratory: Tension Test of Low Carbon SteelДокумент11 страницMechanics of Materials Laboratory: Tension Test of Low Carbon SteelMuhammad Usman KhaleeqОценок пока нет
- Fourier IntegralsДокумент11 страницFourier IntegralsMuhammad Usman KhaleeqОценок пока нет
- Wave EquationДокумент10 страницWave EquationMuhammad Usman KhaleeqОценок пока нет
- Heat EquationДокумент6 страницHeat EquationMuhammad Usman KhaleeqОценок пока нет
- Steady Two Dimensional Heat ProblemДокумент6 страницSteady Two Dimensional Heat ProblemMuhammad Usman KhaleeqОценок пока нет
- Numerical Investigation On The Melting of Nanoparticle-Enhanced PCMДокумент11 страницNumerical Investigation On The Melting of Nanoparticle-Enhanced PCMAlirezaОценок пока нет
- CHENNAI INSTITUTE OF TECHNOLOGY 2021 UNIT I BASIC CONCEPTS AND FIRST LAWДокумент11 страницCHENNAI INSTITUTE OF TECHNOLOGY 2021 UNIT I BASIC CONCEPTS AND FIRST LAWKEERTHIVASAN R MechОценок пока нет
- Analisis Termodinamis Proses AlirДокумент47 страницAnalisis Termodinamis Proses AlirHendra LeosuОценок пока нет
- Guide to Designing Heat Transfer SystemsДокумент13 страницGuide to Designing Heat Transfer SystemsAnonymous QSfDsVxjZ100% (3)
- Exp 4 GroupДокумент14 страницExp 4 GroupAlexis Joshua LaceОценок пока нет
- Physics Formula Booklet - by Kerwin SpringerДокумент51 страницаPhysics Formula Booklet - by Kerwin SpringerAbigail IsraelОценок пока нет
- Lecture 01Документ11 страницLecture 01jedrajОценок пока нет
- Junior Engineers (Civil, Mechanical, Electrical, & Quantity Surveying & Contract) Examination, 2016Документ36 страницJunior Engineers (Civil, Mechanical, Electrical, & Quantity Surveying & Contract) Examination, 2016sai manojОценок пока нет
- Question (1) :: Choose The Correct AnswerДокумент3 страницыQuestion (1) :: Choose The Correct Answerphysics a2Оценок пока нет
- Dimple Jacket Heat Transfer Estimation PDFДокумент3 страницыDimple Jacket Heat Transfer Estimation PDFicingrockОценок пока нет
- Lab-Thermal Energy Transfer-Student GuideДокумент8 страницLab-Thermal Energy Transfer-Student GuideCyrusquinonesОценок пока нет
- Manual SalinasДокумент90 страницManual SalinasRenan AlvesОценок пока нет
- Air Conditioning 1Документ16 страницAir Conditioning 1seid negashОценок пока нет
- ThermodynamicsДокумент15 страницThermodynamicsGillianne Mae VargasОценок пока нет
- Heat of Fusion Powerpoint MiniprojectДокумент9 страницHeat of Fusion Powerpoint MiniprojectcaffeinewriterОценок пока нет
- Pre Heat & PWHT of PipingДокумент2 страницыPre Heat & PWHT of PipingHarish GandhiОценок пока нет
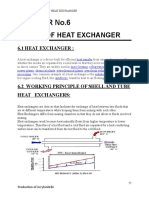
- Chapter No.6: Design of Heat ExchangerДокумент35 страницChapter No.6: Design of Heat ExchangerGlacier RamkissoonОценок пока нет
- Coupling GuardsДокумент10 страницCoupling Guards최승원Оценок пока нет
- Convection Heat Transfer CoefficientДокумент9 страницConvection Heat Transfer CoefficientnurettinОценок пока нет
- Heat Transfer Problems & SolutionsДокумент2 страницыHeat Transfer Problems & SolutionsDebjyoti DeyОценок пока нет
- 4000 MTPD Ammonia Plant Based On Proven Technology: Joachim Rüther, John Larsen, Dennis Lippmann, Detlev ClaesДокумент8 страниц4000 MTPD Ammonia Plant Based On Proven Technology: Joachim Rüther, John Larsen, Dennis Lippmann, Detlev Claesvaratharajan g rОценок пока нет
- Volunteer Handbook Kerry LGBT Festival of PrideДокумент44 страницыVolunteer Handbook Kerry LGBT Festival of PrideKerryFestivalofPrideОценок пока нет
- Ahlers 2011Документ13 страницAhlers 2011anesaОценок пока нет
- Removing The Mystery of Entropy and Termodynamics 32636 - 1 PDFДокумент17 страницRemoving The Mystery of Entropy and Termodynamics 32636 - 1 PDFRocio Milagros Farfan SilvaОценок пока нет
- Principles and Pressure Drop Calculation Across The Multiple Effect Evaporator Bodies - Sugar Industry TechnologiesДокумент6 страницPrinciples and Pressure Drop Calculation Across The Multiple Effect Evaporator Bodies - Sugar Industry TechnologiesYounas SardarОценок пока нет
- Modelling and Control of Extruder Barrel Temperature Field: Slavomír Lipár, Pavol Noga, Gabriel HulkóДокумент6 страницModelling and Control of Extruder Barrel Temperature Field: Slavomír Lipár, Pavol Noga, Gabriel HulkórahulОценок пока нет
- See Tula 1996Документ10 страницSee Tula 1996Arturo Hernández MoralesОценок пока нет
- Alcorcon PIPE Merged SolvedДокумент80 страницAlcorcon PIPE Merged SolvedBernalynMalinaoОценок пока нет
- RC EXAM GEAS03 Chemistry Thermo PhysicsДокумент4 страницыRC EXAM GEAS03 Chemistry Thermo PhysicsaljamierОценок пока нет