Вам также может понравиться
- TransducerДокумент11 страницTransducerRohit WayamОценок пока нет
- Chapter 2 and 3: by HenokДокумент52 страницыChapter 2 and 3: by Henokenok henaОценок пока нет
- Transducers Explained: Types, Working Principles and ApplicationsДокумент55 страницTransducers Explained: Types, Working Principles and ApplicationsPOORVI LALWANIОценок пока нет
- Displacement SensorsДокумент32 страницыDisplacement SensorsMuhammad Qasim SajidОценок пока нет
- Unit VДокумент27 страницUnit Vsenthilku marОценок пока нет
- Q2 Transducer SensorДокумент264 страницыQ2 Transducer SensormarycrisbanayОценок пока нет
- Emi 13 TransducerДокумент44 страницыEmi 13 TransducerhasibОценок пока нет
- UNIT - 3-Sensors and Machine VisionДокумент19 страницUNIT - 3-Sensors and Machine VisionM.Saravana Kumar..M.EОценок пока нет
- TransducerДокумент30 страницTransducerVishal GuptaОценок пока нет
- Eee225 03Документ17 страницEee225 03Djirangmor JosephОценок пока нет
- Eee225 03-1Документ36 страницEee225 03-1Djirangmor JosephОценок пока нет
- Unit 5 - Sensors & TransducersДокумент29 страницUnit 5 - Sensors & TransducerssatyaОценок пока нет
- TransducersДокумент25 страницTransducersmiriam.aliceОценок пока нет
- Transducers (ShortДокумент34 страницыTransducers (ShortiamgeniousОценок пока нет
- 7transducers SensorsДокумент40 страниц7transducers SensorsJack OneОценок пока нет
- Sensors TransducerДокумент46 страницSensors TransducerRachit JhunjhunwalaОценок пока нет
- Transducers: Types, Principles and ApplicationsДокумент49 страницTransducers: Types, Principles and ApplicationsFuad MudesirОценок пока нет
- University Institute of Engineering Department Au-1Документ40 страницUniversity Institute of Engineering Department Au-1Manveer SinghОценок пока нет
- Electrical Measurements and Instrumentation (Introduction To Instrumentation Engineering) 3/1/21Документ30 страницElectrical Measurements and Instrumentation (Introduction To Instrumentation Engineering) 3/1/21tesfaye meberateОценок пока нет
- Transducers Convert Energy Forms to Electrical SignalsДокумент77 страницTransducers Convert Energy Forms to Electrical SignalsAbhimanyu PerumalОценок пока нет
- Mphyec-1F: Unit-2 TransducerДокумент32 страницыMphyec-1F: Unit-2 TransducerSahiba PerveenОценок пока нет
- TransducersДокумент66 страницTransducersAnanya SrivastavaОценок пока нет
- EMT 4103 SENSORS AND TRANSDUCERS SPECIFICATIONSДокумент31 страницаEMT 4103 SENSORS AND TRANSDUCERS SPECIFICATIONSSEAN WALLACEОценок пока нет
- Transducers: An SEO-Optimized GuideДокумент26 страницTransducers: An SEO-Optimized GuideraajitaОценок пока нет
- Mechanical Measurements and InstrumentationДокумент71 страницаMechanical Measurements and InstrumentationanandakumarmtsОценок пока нет
- TransducersДокумент26 страницTransducersamriscribd100% (2)
- Instrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEДокумент29 страницInstrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEMuhammad HarisОценок пока нет
- Transducers: An IntroductionДокумент61 страницаTransducers: An IntroductionHari Narayanan ACОценок пока нет
- Chapter 12Документ23 страницыChapter 12nabilmalobaОценок пока нет
- Measurement and Instrumentation Secondary Transducers and Variable Resistance TransducersДокумент29 страницMeasurement and Instrumentation Secondary Transducers and Variable Resistance TransducersHassan -Оценок пока нет
- TransducersДокумент70 страницTransducersaishwarye gaikwad100% (1)
- SensorsДокумент21 страницаSensorsUsman AliОценок пока нет
- Piezoelectric AccelerometerДокумент9 страницPiezoelectric AccelerometerSARDAR PATELОценок пока нет
- Transducers L 1Документ27 страницTransducers L 1Proxima YusОценок пока нет
- Transducers: Introduction and ClassificationДокумент56 страницTransducers: Introduction and ClassificationThatayamodimo KebueОценок пока нет
- TransducersДокумент81 страницаTransducersRohit RathodОценок пока нет
- Electrical Transducer Types & ApplicationsДокумент20 страницElectrical Transducer Types & ApplicationsSachin K GowdaОценок пока нет
- By-Harvinder Attri & Kulwinder Singh Submitted To MR Nripjit SinghДокумент46 страницBy-Harvinder Attri & Kulwinder Singh Submitted To MR Nripjit SinghJagpal SinghОценок пока нет
- Sensors and Transducers GuideДокумент47 страницSensors and Transducers GuideAbdul Hakeem Semar KamaluddinОценок пока нет
- Electronic Instrumentation & Control SystemsДокумент76 страницElectronic Instrumentation & Control Systemsshahnawazuddin100% (1)
- EE17401-M& I Inductive Transducer, Capacitive TransducerДокумент31 страницаEE17401-M& I Inductive Transducer, Capacitive TransduceravsОценок пока нет
- TransducersДокумент101 страницаTransducersPramod PathadeОценок пока нет
- Sensor & TransducersДокумент20 страницSensor & TransducersCifha Rajesh SaldhanhaОценок пока нет
- 9 Chapter - 4 PMMC Instruments Part 2 19062023 051614pmДокумент40 страниц9 Chapter - 4 PMMC Instruments Part 2 19062023 051614pmAbdullah ZamirОценок пока нет
- Taught By: Daniel Opoku (PH.D.) : 288 (Electrical) Measurement & InstrumentationДокумент34 страницыTaught By: Daniel Opoku (PH.D.) : 288 (Electrical) Measurement & InstrumentationPhamous TayОценок пока нет
- ENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical QuantitiesДокумент67 страницENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical Quantitiesyccy1223Оценок пока нет
- Chapter 3 - Transducer and Sensors Part 1Документ46 страницChapter 3 - Transducer and Sensors Part 1Zersh EthioОценок пока нет
- Chapter 3 - Transducer and Sensors Part 1Документ46 страницChapter 3 - Transducer and Sensors Part 1Zersh Ethio100% (1)
- Lecture 9Документ94 страницыLecture 9Ahmar KhanОценок пока нет
- CH 3 Sensors and Applications IДокумент20 страницCH 3 Sensors and Applications Idagmawi gebrewoldОценок пока нет
- Sensors and Transducers IntroductionДокумент47 страницSensors and Transducers IntroductionOnkar HeddurshettiОценок пока нет
- PRIMARY SENSOR CHARACTERISTICSДокумент41 страницаPRIMARY SENSOR CHARACTERISTICSAshutosh PandeyОценок пока нет
- BEEE-Unit VI TransducerДокумент71 страницаBEEE-Unit VI TransducerAisha JainОценок пока нет
- Sensors and Machine Vision: Position, Range, Proximity, and Touch SensorsДокумент15 страницSensors and Machine Vision: Position, Range, Proximity, and Touch SensorsMICHEL RAJОценок пока нет
- SENSOR AND TRANSDUCERS: MEASURING POSITIONДокумент80 страницSENSOR AND TRANSDUCERS: MEASURING POSITIONpushpanarayanan100% (1)
- Transducers: Presentation By: Er. Harpreet Singh Lecturer (Electrical Engg.) GPC Mohali (Khunimajra)Документ70 страницTransducers: Presentation By: Er. Harpreet Singh Lecturer (Electrical Engg.) GPC Mohali (Khunimajra)Tanu RdОценок пока нет
- Presentation TransducerДокумент13 страницPresentation TransducerR JadhavОценок пока нет
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10От EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Оценок пока нет
- Presentation On Vocational Training at NSPCL, BHILAIДокумент22 страницыPresentation On Vocational Training at NSPCL, BHILAISanKhanОценок пока нет
- En - How Planar Magnetics Improve Performance in Power ElectronicsДокумент20 страницEn - How Planar Magnetics Improve Performance in Power ElectronicsMuhammad Qasim RaufОценок пока нет
- Canadian Solar Hidm Mono Perc 320 WДокумент2 страницыCanadian Solar Hidm Mono Perc 320 WDaniel CaceresОценок пока нет
- IRS2106/IRS21064 high and low side driver datasheetДокумент25 страницIRS2106/IRS21064 high and low side driver datasheetmohamedОценок пока нет
- Shri Siddhantha Shikhamani Hindi BookДокумент306 страницShri Siddhantha Shikhamani Hindi BookVeeresh BT50% (2)
- FPGA DS 02056 4 1 MachXO2 Family Data SheetДокумент119 страницFPGA DS 02056 4 1 MachXO2 Family Data Sheetjoaica5046Оценок пока нет
- Sure Step ManualДокумент124 страницыSure Step Manualphild2na2Оценок пока нет
- Measuring TransducersДокумент8 страницMeasuring TransducersJordan CitizenОценок пока нет
- Ijert Ijert: Modeling and Simulation of STATCOMДокумент4 страницыIjert Ijert: Modeling and Simulation of STATCOMAbdallah AmroОценок пока нет
- Anritsu - VNA - Understanding VNA CalibrationДокумент36 страницAnritsu - VNA - Understanding VNA CalibrationScribdFgОценок пока нет
- Optical Fiber Connection Chapter 4: Fiber Splicing and ConnectorizationДокумент39 страницOptical Fiber Connection Chapter 4: Fiber Splicing and ConnectorizationFaizal EngintechОценок пока нет
- 18 A - Novel - 0.8-V - 79-nW - CMOS-Only - Voltage - Reference - With - 55-dB - PSRR - 100 - HZДокумент5 страниц18 A - Novel - 0.8-V - 79-nW - CMOS-Only - Voltage - Reference - With - 55-dB - PSRR - 100 - HZBalaramamurty SannidhiОценок пока нет
- Manual Microstep MD2U MD20 enДокумент1 страницаManual Microstep MD2U MD20 enJose M RojasОценок пока нет
- Single Phase Midpoint Controlled Rectifier SetupДокумент3 страницыSingle Phase Midpoint Controlled Rectifier Setupshameem v.pОценок пока нет
- Technical DocumentsДокумент3 страницыTechnical DocumentsRaluca MutuОценок пока нет
- Calculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL StarterДокумент5 страницCalculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL Startererson1981Оценок пока нет
- ELS Pricelist 1 September 2018Документ9 страницELS Pricelist 1 September 2018Patrisedi 42Оценок пока нет
- Exp 3Документ4 страницыExp 3Adrian FerrerosОценок пока нет
- Sharp Solar Panel SpecificationsДокумент2 страницыSharp Solar Panel SpecificationsAdix M.Оценок пока нет
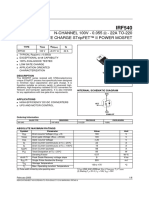
- N-CHANNEL 100V - 0.055 - 22A TO-220 Low Gate Charge Stripfet™ Ii Power MosfetДокумент8 страницN-CHANNEL 100V - 0.055 - 22A TO-220 Low Gate Charge Stripfet™ Ii Power MosfetCode Main ProjectОценок пока нет
- First Lesson Ceramics IntroductionДокумент28 страницFirst Lesson Ceramics IntroductionAyah BonifeОценок пока нет
- EN1802 Basic Electronics Course OutlineДокумент23 страницыEN1802 Basic Electronics Course OutlineNADULA RUSIRUОценок пока нет
- Unsw Anrep 1996Документ47 страницUnsw Anrep 1996agooОценок пока нет
- Flexible Organo-Metal Halide Perovskite Solar Cells On A Ti Metal SubstrateДокумент5 страницFlexible Organo-Metal Halide Perovskite Solar Cells On A Ti Metal SubstrateHuckkey HuОценок пока нет
- Introduction To Analog Integrated Circuits DesignДокумент20 страницIntroduction To Analog Integrated Circuits DesignGowtham HariОценок пока нет
- Oscillator Test AnswersДокумент5 страницOscillator Test AnswersNikhil Pratap GargОценок пока нет
- Lab Manual: EGCI 232 Engineering ElectronicsДокумент26 страницLab Manual: EGCI 232 Engineering ElectronicsgapswitОценок пока нет
- 3320Документ2 страницы3320victorОценок пока нет
- Sinamics Sm150 Gm150 Igbt enДокумент12 страницSinamics Sm150 Gm150 Igbt ensykimk8921Оценок пока нет
- LEON3 SPARC Processor, The Past Present and FutureДокумент41 страницаLEON3 SPARC Processor, The Past Present and FutureBonnie ThompsonОценок пока нет